一种耐高温灵活调节的消防机器人的制作方法
本技术涉及消防机器人的,具体为一种耐高温灵活调节的消防机器人。
背景技术:
1、在商场、超市、加油站、化工厂等发生火灾时,由于火场温度很高,一般的救援消防车以及消防人员不能靠近也不能进入火场,现场指挥人员无法了解火情,使灭火难度加大,所以消防机器人被开发研制用于高温区域深入灭火。当前,消防机器人在消防作业中面临苛刻的高温环境,其关键部件履带底盘本身大多不具备耐高温的性能指标。
2、履带式机器人底盘是消防机器人控制部分和动力部分的保护罩,是机器人灵活运动的保障,现有的消防机器人在火场救援时,由于高温环境下使用常常造成消防机器人履带软化失效、内部控制主板及电源系统侵入高温,容易造成机器人的使用寿命降低,为此本实用新型提出一种耐高温灵活调节的消防机器人用于解决上述问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种耐高温灵活调节的消防机器人。
3、(二)技术方案
4、为实现上述目的,本实用新型提供如下技术方案:一种耐高温灵活调节的消防机器人,包括消防机器人主体和用于消防机器人移动的履带,所述消防机器人主体的底盘两侧焊接有防护板材,所述防护板材底部一侧设置有多个喷头,所述消防机器人主体顶部设置有水箱,所述消防机器人主体的机体两侧设置有水泵,所述水泵顶部与水箱连接,所述水泵底部连接有三通管,所述三通管和喷头之间通过金属管连通,所述水箱两侧设置有第一散热风扇和第二散热风扇,所述第一散热风扇位于第二散热风扇左侧,所述消防机器人主体顶部位于水箱两侧设置有支架,所述支架顶部设置有防护板。
5、为了便于对履带进行风冷散热,本实用新型的改进有,所述第二散热风扇上套接有主管道,所述防护板材上位于喷头一侧设置有出风口,所述主管道底端与防护板材上出风口对应位置连接,所述第一散热风扇上套装有副管道,所述副管道与主管道连通,所述出风口内设置有滤网,所述主管道和副管道的侧表面固定连接有半导体制冷片,所述半导体制冷片的制冷端延伸至主管道的内部和副管道的内部,所述半导体制冷片的发热端和位置位于主管道和副管道的外部。
6、为了便于增加防护板材的实用性,本实用新型的改进有,所述防护板材从上至下依次包括支撑层和隔热层,所述支撑层材质为铬锰金属铸铁,所述隔热层材质为防火板。
7、为了便于清理履带,本实用新型的改进有,所述保护板材底部两侧设置有支柱,所述支柱底部设置有刮板,所述刮板与履带相配合。
8、为了便于控制水泵,本实用新型的改进有,右侧所述支柱内侧安装有热敏开关,所述热敏开关与水泵电连接。
9、为了便于查看水桶内的液体的剩余量,本实用新型的改进有,所述水箱上嵌入设置有观察窗,所述观察窗材质为耐高温玻璃。
10、(三)有益效果
11、与现有技术相比,本实用新型提供了一种耐高温灵活调节的消防机器人,具备以下有益效果:
12、该耐高温灵活调节的消防机器人,通过水箱、水泵、金属管和喷头的设置,便于对履带进行喷水降温,使履带保持良好的运行情况,通过防护板材的设置,便于保护履带防止坠落物品砸坏履带,通过第一散热风扇和第二散热风扇的设置,便于对水箱进行降温,同时配合主管道和副管道的设置,便于对履带进行风冷降温。
技术特征:
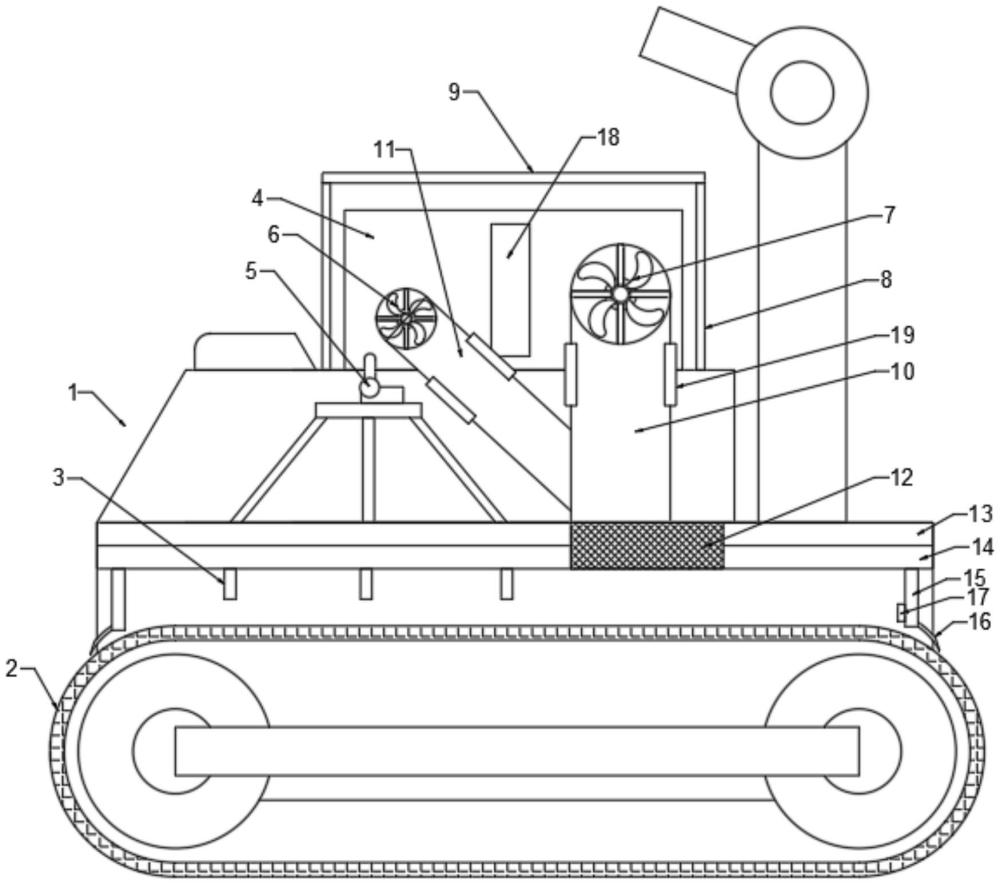
1.一种耐高温灵活调节的消防机器人,包括消防机器人主体(1)和用于消防机器人移动的履带(2),其特征在于:所述消防机器人主体(1)的底盘两侧焊接有防护板(9)材,所述防护板(9)材底部一侧设置有多个喷头(3),所述消防机器人主体(1)顶部设置有水箱(4),所述消防机器人主体(1)的机体两侧设置有水泵(5),所述水泵(5)顶部与水箱(4)连接,所述水泵(5)底部连接有三通管,所述三通管和喷头(3)之间通过金属管连通,所述水箱(4)两侧设置有第一散热风扇(6)和第二散热风扇(7),所述第一散热风扇(6)位于第二散热风扇(7)左侧,所述消防机器人主体(1)顶部位于水箱(4)两侧设置有支架(8),所述支架(8)顶部设置有防护板(9)。
2.根据权利要求1所述的一种耐高温灵活调节的消防机器人,其特征在于:所述第二散热风扇(7)上套接有主管道(10),所述防护板(9)材上位于喷头(3)一侧设置有出风口,所述主管道(10)底端与防护板(9)材上出风口对应位置连接,所述第一散热风扇(6)上套装有副管道(11),所述副管道(11)与主管道(10)连通,所述出风口内设置有滤网(12),所述主管道(10)和副管道(11)的侧表面固定连接有半导体制冷片(19),所述半导体制冷片(19)的制冷端延伸至主管道(10)的内部和副管道(11)的内部,所述半导体制冷片(19)的发热端和位置位于主管道(10)和副管道(11)的外部。
3.根据权利要求2所述的一种耐高温灵活调节的消防机器人,其特征在于:所述防护板(9)材从上至下依次包括支撑层(13)和隔热层(14),所述支撑层(13)材质为铬锰金属铸铁,所述隔热层(14)材质为防火板。
4.根据权利要求3所述的一种耐高温灵活调节的消防机器人,其特征在于:所述防护板材底部两侧设置有支柱(15),所述支柱(15)底部设置有刮板(16),所述刮板(16)与履带(2)相配合。
5.根据权利要求4所述的一种耐高温灵活调节的消防机器人,其特征在于:右侧所述支柱(15)内侧安装有热敏开关(17),所述热敏开关(17)与水泵(5)电连接。
6.根据权利要求5所述的一种耐高温灵活调节的消防机器人,其特征在于:所述水箱(4)上嵌入设置有观察窗(18),所述观察窗(18)材质为耐高温玻璃。
技术总结
本技术涉及消防机器人的技术领域,具体为一种耐高温灵活调节的消防机器人,包括消防机器人主体和用于消防机器人移动的履带,所述消防机器人主体的底盘两侧焊接有防护板材,所述防护板材底部一侧设置有多个喷头,所述消防机器人主体顶部设置有水箱,所述消防机器人主体的机体两侧设置有水泵,所述水泵顶部与水箱连接,通过水箱、水泵、金属管和喷头的设置,便于对履带进行喷水降温,使履带保持良好的运行情况,通过防护板材的设置,便于保护履带防止坠落物品砸坏履带,通过第一散热风扇和第二散热风扇的设置,便于对水箱进行降温,同时配合主管道和副管道的设置,便于对履带进行风冷降温。
技术研发人员:刘爱香,陈家龙
受保护的技术使用者:苏州瀚克欣电子有限公司
技术研发日:20230915
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!