一种高机动性深井救援机器人
本申请涉及深井救援,具体涉及一种高机动性深井救援机器人。
背景技术:
1、井下救援是一类常见的消防部队抢险救援任务,深井救援难度大,成本高,过程繁琐复杂,平均耗时要数10小时以上,落井人员存活率很低,还有很多救援人员因此丧命。总结深井救援难以成功的原因主要分为以下几个方面:设备到达现场困难,因为深井往往处于偏远地方,专业大型设备和救援人员及时到达位置施救困难;深井环境复杂,由于深井年久失修,井下可能存在大量的易燃易爆、有毒有害的气体。如果救援人员下井救援,不仅落井者无法被救安全出来,救援人员还很有可能会自己也遇到生命危险;突发状况多,如二次塌陷、井壁收窄、井口堵塞等突发情况。
2、深井救援设备存在救援耗时长、救援效率低、容易造成二次伤害等问题,远远不能满足目前深井救援作业的需求,急需根据深井救援作业面临的困难研制新型高机动性救援设备。
技术实现思路
1、为解决上述技术问题,本发明提供一种高机动深井救援机器人,采用伸缩折叠机构,减小了整个机体的体积,解决了设备到达现场困难的问题,配备的救援装备可以及时给被困人员提供救援物资,而且可避免了救援人员下井救援发生意外的情况。
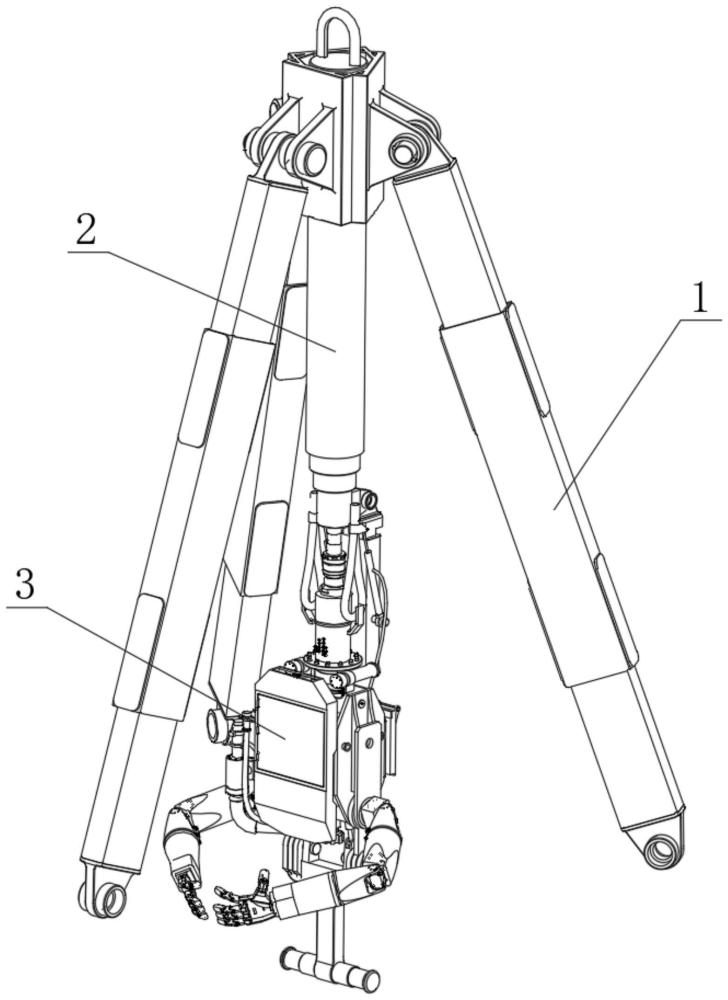
2、为实现本发明目的,提供了一种稳定性好的深井救援设备,包括:
3、连接机构,其一端设置有铰接支座;
4、支撑腿,设置有若干个,所述支撑腿一端与地面接触,另一端与所述铰接支座连接;
5、救援装置,与所述连接机构的另一端连接,所述救援装置包括用于支撑伤员腿部的支撑结构和用于固定伤员上身的机械臂。
6、在本申请的一些实施例中,所述连接机构设置有三个铰接支座,且在顶部设置有吊环;
7、所述支撑腿设置有三个,三个所述支撑腿与地面接触的一端可向外伸展形成三角支架;
8、所述支撑腿的另一端设置有铰接轴套,所述铰接轴套与所述连接机构的铰接支座连接。
9、在本申请的一些实施例中,所述支撑腿包括伸缩缸以及第一支撑杆和第二支撑杆;
10、所述第一支撑杆和所述第二支撑杆分别可滑动地嵌套连接在所述伸缩缸两端;
11、所述第一支撑杆远离所述伸缩缸的一端与所述连接机构连接。
12、在本申请的一些实施例中,所述伸缩缸与所述第一支撑杆和所述第二支撑杆之间分别设置有锁紧件,所述锁紧件包括内锁紧套和外锁紧套,所述内锁紧套安装在外锁紧套内,所述伸缩缸与外锁紧套的一端螺接,所述第一支撑杆或所述第二支撑杆插接在所述内锁紧套内,所述内锁紧套至于所述伸缩缸内。
13、在本申请的一些实施例中,所述连接机构包括固定杆和伸缩杆组件,所述伸缩杆组件的一端可滑动地嵌套连接在所述固定杆的一端;
14、所述伸缩杆组件包括多个伸缩杆,相邻的两个所述伸缩杆可滑动地嵌套连接。
15、在本申请的一些实施例中,所述伸缩杆组件包括:依次首尾嵌套的第一伸缩杆、第二伸缩杆和第三伸缩杆;且所述第一伸缩杆与所述固定杆可滑动地嵌套连接,所述第三伸缩杆与所述救援装置连接。
16、在本申请的一些实施例中,所述救援装置与所述连接机构通过铰接件连接,且所述救援装置上还设置有保险绳,所述保险绳与所述连接机构连接。
17、在本申请的一些实施例中,所述救援装置包括用于存放急救物质的储备仓以及安装在所述储备仓侧边的生命体征检测装置和供氧设备;
18、所述储备仓相对的两侧分别安装有所述机械臂臂,所述机械臂臂由内部伺服电机驱动;
19、所述储备仓的底部连接有所述支撑机构。
20、在本申请的一些实施例中,所述腿部支撑机构包括连接杆以及与所述连接杆垂直连接的调节杆组件,所述调节杆组件可沿水平方向伸缩。
21、在本申请的一些实施例中,所述调节杆组件包括固定杆和分别可滑动地嵌套连接所述固定杆两端的调节杆,所述固定杆与所述连接杆连接;
22、所述调节杆包括可滑动地嵌套连接的第一短管和第二短管,所述第一短管与所述固定管可滑动地嵌套连接。
23、由于采用了上述技术方案,本申请所取得的有益效果为:
24、在连接机构的顶部安装有吊环,方便吊装,救援机器人整个机身可折叠,重量轻,占用空间小,普通皮卡车即能满足搬运要求,具有较高机动性;高刚性伸缩机械臂作业时安全、稳定,自适应适时调节其长度,避免作业时臂长摆动造成碰撞及对伤员二次伤害,能极大适应不同深度救援工作。救援装置上配备有急救装置及物质,可以在最短时间内对被困人员提供救援物质,及时对伤员的伤情进行诊断、进行应急处理,减少人员伤亡风险,提高救援效率。救援装置上配备环抱式双臂机械臂,多关节机械臂可自适应身体姿态,安全贴合身体,配备的腿部支撑机构可自主双向伸缩,最大程度减少伤员的肢体运动,机械臂和腿部支撑机构的结合使用,避免了伤员二次伤害,方便急救工作开展。
技术特征:
1.一种高机动性深井救援机器人,其特征在于,包括:
2.根据权利要求1所述的高机动性深井救援机器人,其特征在于,
3.根据权利要求1或2所述的高机动性深井救援机器人,其特征在于,所述支撑腿包括伸缩缸以及第一支撑杆和第二支撑杆;
4.根据权利要求3所述的高机动性深井救援机器人,其特征在于,所述伸缩缸与所述第一支撑杆和所述第二支撑杆之间分别设置有锁紧件,所述锁紧件包括内锁紧套和外锁紧套,所述内锁紧套安装在外锁紧套内,所述伸缩缸与外锁紧套的一端螺接,所述第一支撑杆或所述第二支撑杆插接在所述内锁紧套内,所述内锁紧套至于所述伸缩缸内。
5.根据权利要求1所述的高机动性深井救援机器人,其特征在于,所述连接机构包括固定杆和伸缩杆组件,所述伸缩杆组件的一端可滑动地嵌套连接在所述固定杆的一端;
6.根据权利要求5所述的高机动性深井救援机器人,其特征在于,所述伸缩杆组件包括:依次首尾嵌套的第一伸缩杆、第二伸缩杆和第三伸缩杆;且所述第一伸缩杆与所述固定杆可滑动地嵌套连接,所述第三伸缩杆与所述救援装置连接。
7.根据权利要求1所述的高机动性深井救援机器人,其特征在于,所述救援装置与所述连接机构通过铰接件连接,且所述救援装置上还设置有保险绳,所述保险绳与所述连接机构连接。
8.根据权利要求7所述的高机动性深井救援机器人,其特征在于,所述救援装置包括用于存放急救物质的储备仓以及安装在所述储备仓侧边的生命体征检测装置和供氧设备;
9.根据权利要求8所述的高机动性深井救援机器人,其特征在于,所述腿部支撑机构包括连接杆以及与所述连接杆垂直连接的调节杆组件,所述调节杆组件可沿水平方向伸缩。
10.根据权利要求9所述的高机动性深井救援机器人,其特征在于,所述调节杆组件包括固定杆和分别可滑动地嵌套连接所述固定杆两端的调节杆,所述固定杆与所述连接杆连接;
技术总结
本申请提供一种高机动性深井救援机器人,涉及深井救援技术领域。高机动性深井救援机器人包括连接机构、支撑腿以及救援装置,连接机构的一端设置有铰接支座;支撑腿设置有若干个,所述支撑腿一端与地面接触,另一端与连接机构的铰接支座连接;救援装置与所述连接机构的另一端连接,所述救援装置包括用于支撑伤员腿部的支撑结构和用于固定伤员上身的机械臂。整机采用伸缩折叠机构,轻量化结构设计,具有较高机动性,配备急救装置,可以在最短时间内对伤情进行应急处理,减少人员伤亡风险,提高救援效率。
技术研发人员:李永伟,史建伟,朱珊,崔国强,曾红璋
受保护的技术使用者:太原工业学院
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!