一种玻璃纤维捻线加捻气圈稳定方法与流程
1.本发明涉及加捻气圈技术领域,尤其是涉及一种玻璃纤维捻线加捻气圈稳定方法。
背景技术:
2.捻线生产过程即张力控制过程,其中丝饼退解过程中的张力控制是否得当和适合,将会影响管纱品质等级和使用情况。张力过大,易产生毛破丝降低纱线强度等。张力过小:直接影响管纱成型和管纱退解等问题,且不利于管纱储存和运输。张力的波动将影响后段织造投纬的波动,纱线在织布纬向飞行时间是否集中,而张力的波动又受到纱线气圈的影响,即纱线在锭轴转运的牵引下,于高速回转自丝饼架退解时,在离心力、空气阻力和丝饼粘结力作用下形成凸起的空间曲线。
3.现有技术中,玻璃纤维捻线加捻钢领和导纱钩升降为一套升降系统,不能满足差动的要求,使气圈不能稳定的控制。
技术实现要素:
4.本发明的目的在于提供一种玻璃纤维捻线加捻气圈稳定方法,主要通过选取合适的减速比,导纱钩至管口距离达到气圈稳定目的,进而确保纱线气圈张力稳定;
5.本发明提供一种玻璃纤维捻线加捻气圈稳定方法,包括如下步骤:s1,通过控制导纱钩和钢领之间的减速比,以及导纱钩到纱管的距离,使导纱钩与钢领之间形成差动气圈,在最大减速比和最小减速比之间的差动气圈为张力稳定气圈。
6.进一步地,步骤s1中,减速比=导纱钩速度/钢领速度。
7.进一步地,步骤s1中,导纱钩位于传感器横梁上,在传感器横梁上设有用于检测气圈张力的传感器。
8.进一步地,最大减速比=传感器横梁最大行程/钢领的可移动行程。
9.进一步地,最小减速比=传感器横梁最小行程/钢领的可移动行程。
10.进一步地,传感器横梁开始位置=a+b;其中,a为纱管长度,b为导纱钩到纱管顶部的距离。
11.进一步地,钢领位置=a+b-c:其中,(a+b)为传感器启动位置,c为钢领到导纱钩的距离。
12.进一步地,钢领的可移动行程=k-(a+b-c);其中,k为管纱最高高度,钢领的最大行程。
13.进一步地,传感器横梁最大行程=l-(a+b);其中:l为导纱钩最高高度。
14.进一步地,传感器横梁最小行程=(k+m)-(a+b);其中:k为管纱最高高度,m为碰撞距离,(a+b)为传感器横梁开始位置。
15.本发明的技术方案通过选取合适的减速比和导纱钩到纱管的距离,确保气圈的稳定性。减少过程质量问题,确保后段织造投纬纬纱飞行时间集中,提高布面品质。
附图说明
16.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
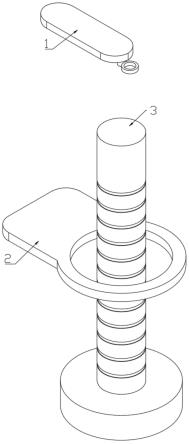
17.图1为本发明的加捻结构示意图;
18.图2为本发明的控制减速比的计算方法示意图;
19.附图标记说明:
20.1-传感器横梁、2-钢领、3-纱管;
具体实施方式
21.下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.在本发明的描述中,需要理解的是,术语"中心"、"纵向"、"横向"、"长度"、"宽度"、"厚度"、"上"、"下"、"前"、"后"、"左"、"右"、"竖直"、"水平"、"顶"、"底"、"内"、"外"、"顺时针"、"逆时针"等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
23.此外,术语"第一"、"第二"仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有"第一"、"第二"的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,"多个"的含义是两个或两个以上,除非另有明确具体的限定。此外,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
24.实施例1
25.如图1所示,本发明提供一种玻璃纤维捻线加捻气圈稳定方法,包括如下步骤:s1,通过控制导纱钩和钢领2之间的减速比,以及导纱钩到纱管3的距离,使导纱钩与钢领2之间形成差动气圈,在最大减速比和最小减速比之间的差动气圈为张力稳定气圈。步骤s1中,减速比=导纱钩速度/钢领2速度。步骤s1中,导纱钩位于传感器横梁1上,在传感器横梁1上设有用于检测气圈张力的传感器。
26.传感器横梁1没有如钢领2自己的动程,它的动程取决于:钢领2的差速比,钢领2和传感器横梁1的位置,传感器横梁1不能移动的太快以免撞到钢领2横梁。通过控制减速比=导纱钩速度/钢领2板速度,导纱钩到管口距离确保气圈稳定。
27.实施例2
28.如图2所示,最大减速比=传感器横梁1最大行程/钢领2的可移动行程。最小减速比=传感器横梁1最小行程/钢领2的可移动行程。传感器横梁1开始位置=a+b;其中,a为纱
管3长度,优选为130mm,b为导纱钩到纱管3顶部的距离,优选为335mm。钢领2位置=a+b-c:其中,(a+b)为传感器启动位置,c为钢领2到导纱钩的距离,优选为460mm。钢领2的可移动行程=k-(a+b-c);其中,k为管纱最高高度,钢领2的最大行程。传感器横梁1最大行程=l-(a+b);其中:l为导纱钩最高高度。传感器横梁1最小行程=(k+m)-(a+b);其中:k为管纱最高高度,m为碰撞距离,(a+b)为传感器横梁1开始位置。
29.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
技术特征:
1.一种玻璃纤维捻线加捻气圈稳定方法,其特征在于,包括如下步骤:s1,通过控制导纱钩和钢领之间的减速比,以及导纱钩到纱管的距离,使导纱钩与钢领之间形成差动气圈,在最大减速比和最小减速比之间的差动气圈为张力稳定气圈。2.根据权利要求1所述的玻璃纤维捻线加捻气圈稳定方法,其特征在于,步骤s1中,减速比=导纱钩速度/钢领速度。3.根据权利要求2所述的玻璃纤维捻线加捻气圈稳定方法,其特征在于,步骤s1中,导纱钩位于传感器横梁上,在传感器横梁上设有用于检测气圈张力的传感器。4.根据权利要求3所述的玻璃纤维捻线加捻气圈稳定方法,其特征在于,最大减速比=传感器横梁最大行程/钢领的可移动行程。5.根据权利要求3所述的玻璃纤维捻线加捻气圈稳定方法,其特征在于,最小减速比=传感器横梁最小行程/钢领的可移动行程。6.根据权利要求4或5所述的玻璃纤维捻线加捻气圈稳定方法,其特征在于,传感器横梁开始位置=a+b;其中,a为纱管长度,b为导纱钩到纱管顶部的距离。7.根据权利要求6所述的玻璃纤维捻线加捻气圈稳定方法,其特征在于,钢领位置=a+b-c:其中,(a+b)为传感器横梁开始位置,c为钢领到导纱钩的距离。8.根据权利要求7所述的玻璃纤维捻线加捻气圈稳定方法,其特征在于,钢领的可移动行程=k-(a+b-c);其中,k为管纱最高高度,钢领的最大行程。9.根据权利要求8所述的玻璃纤维捻线加捻气圈稳定方法,其特征在于,传感器横梁最大行程=l-(a+b);其中:l为导纱钩最高高度,(a+b)为传感器横梁开始位置。10.根据权利要求8所述的玻璃纤维捻线加捻气圈稳定方法,其特征在于,传感器横梁最小行程=(k+m)-(a+b);其中:k为管纱最高高度,m为碰撞距离,(a+b)为传感器横梁开始位置。
技术总结
本发明提供了一种玻璃纤维捻线加捻气圈稳定方法,涉及加捻气圈技术领域,包括如下步骤:S1,通过控制导纱钩和钢领之间的减速比,以及导纱钩到纱管的距离,使导纱钩与钢领之间形成差动气圈,在最大减速比和最小减速比之间的差动气圈为张力稳定气圈。本发明通过选取合适的减速比和导纱钩到纱管的距离,确保气圈的稳定性。减少过程质量问题,确保后段织造投纬纬纱飞行时间集中,提高布面品质。提高布面品质。提高布面品质。
技术研发人员:申青亮 耿雪雪 周永伟 吴瑞欣
受保护的技术使用者:河南光远新材料股份有限公司
技术研发日:2022.09.07
技术公布日:2022/11/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1