回转纱架式上丝机器人的制作方法
1.本实用新型涉及捻线机上料领域,尤其是涉及一种回转纱架式上丝机器人。
背景技术:
2.随着当代生产和科学技术的不断发展,自动化已经进入到越来越多的领域。工业自动化的水平越高,对于企业提升生产效率、降低生产成本、强化安全生产、增加市场竞争力的效果越明显。
3.对于纺织行业的加捻工艺而言,上丝流程是一个典型的大负荷重复劳动过程。因此,对于捻线设备的上丝流程实现自动化,既能够大大减轻操作者的劳动强度,也能降低企业的生产成本。上丝流程自动化必然是纺织企业选择的一个趋势。
4.目前上丝流程主要采用人工上丝,其缺点如下:
5.目前捻线机的上丝流程从原丝拆垛到原丝转运,再到原丝上丝,全部都是人工进行操作的。为了提升生产效率、增加收益,捻线设备需要不间断工作。因此,人工上丝需要匹配设备工作,进行不间断工作。对于上丝的操作工而言,一个纱卷的重量达15公斤,单人一个班次要完成上千个纱卷的上丝流程,该过程的工作量较大,且工作内容具有较高的重复性。
6.现有技术参见cn 113086669 a一种自动化挂纱机器人中记载的结构,该专利主要是用于向纱架上纱,从纱架向捻线机上纱时比较麻烦。
技术实现要素:
7.本实用新型提供了一种回转纱架式上丝机器人,解决了传统的上纱装置上纱效率低的问题。
8.为解决上述技术问题,本实用新型所采用的技术方案是:一种回转纱架式上丝机器人,包括agv主体装置,agv主体装置上设有直线滑动装置,直线滑动装置设有可上下滑动的滑动架,滑动架上设有带夹具的多轴机器人,agv主体装置上直线滑动装置的一侧设有纱架,纱架两侧设有多个原纱支承杆,原纱支承杆用于放置原纱卷。
9.优选的方案中,agv主体装置上设有可水平转动的托运平台,纱架与托运平台连接。
10.优选的方案中,直线滑动装置还包括立架,立架上设有导轨滑块装置,滑动架通过导轨滑块装置与立架滑动连接,立架上还设有齿条,滑动架上设有第二减速电机,第二减速电机轴端设有齿轮,齿轮与齿条啮合。
11.优选的方案中,立架上端还设有可转动的支承转轴,还设有配重块和配重连接件,配重连接件一端与配重块连接,配重连接件另一端绕过支承转轴与滑动架连接。
12.优选的方案中,agv主体装置包括agv小车,agv小车上端设有第一减速电机和连接法兰,第一减速电机轴端与连接法兰套接,连接法兰与托运平台下端连接。
13.优选的方案中,agv主体装置还设有避障雷达,避障雷达设在agv小车外侧。
14.本实用新型的有益效果为:设有回转纱架,方便机器人从一侧取放原纱;机器人整体在竖直方向上具有一个自由度,该自由度能增大机器人的上丝范围,使得复合机器人可适用于不同规格的捻线机;通过各个部分有机结合,能够准确的、高效的进行捻线机纱架的上丝;通过自动上丝,不仅减轻了操作工的工作强度和工作量,而且提升了上丝效率、节省了人工带来的各种冗余劳动,为企业节省了成本,增加了效益。
附图说明
15.下面结合附图和实施例对本实用新型作进一步说明。
16.图1是本实用新型的示意图。
17.图2是本实用新型的俯视图。
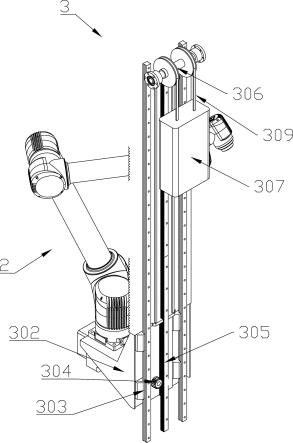
18.图3是本实用新型的直线滑动装置内部结构图。
19.图4是本实用新型的直线滑动装置侧视图。
20.图5是本实用新型的托运平台示意图。
21.图6是本实用新型的agv主体装置爆炸示意图。
22.图中:agv主体装置1;agv小车101;第一减速电机102;连接法兰103;托运平台104;外壳体105;避障雷达106;多轴机器人2;直线滑动装置3;立架301;滑动架302;导轨滑块装置303;齿轮304;齿条305;支承转轴306;配重块307;第二减速电机308;配重连接件309;纱架4;原纱支承杆401;原纱卷5;夹具装置6;第一固定体601;滑动体602;第二固定体603;夹爪604;铰链杆605;连接杆606;支承筒607;导向护套608;定位连接块609;气缸610;拉杆611;相机7;光源8。
具体实施方式
23.如图1-6中,一种回转纱架式上丝机器人,包括agv主体装置1,agv主体装置1上设有直线滑动装置3,直线滑动装置3设有可上下滑动的滑动架302,滑动架302上设有带夹具的多轴机器人2,夹具可采用类似三爪卡盘结构或手指气缸夹住原纱卷5的内筒或外圈,agv主体装置1上直线滑动装置3的一侧设有纱架4,纱架4两侧设有多个原纱支承杆401,原纱支承杆401用于放置原纱卷5,原纱支承杆401略微向上倾斜几度,防止原纱卷5掉落。
24.agv小车带动多轴机器人根据指令在车间来回移动,实现原纱卷5向纱架4的上料和纱架4上的原纱卷5向捻线机的上料。
25.滑动架302与多轴机器人2的连接位置朝向agv主体装置1一侧的方向,agv主体装置1一侧是指如图2中上侧和下侧的方向,即agv主体装置1长度边所在的方向,滑动架302与多轴机器人2的连接位置 ,是指图4中滑动架302所处的位置。
26.优选的方案中,agv主体装置1上设有可水平转动的托运平台104,托运平台104上端面设有定位卡槽,纱架4与安装在定位卡槽中。
27.优选的方案中,直线滑动装置3还包括立架301(图3图4隐藏了),立架301上设有导轨滑块装置303,滑动架302通过导轨滑块装置303与立架301滑动连接,立架301上还设有齿条305,滑动架302上设有第二减速电机308,第二减速电机308轴端设有齿轮304,齿轮304与齿条305啮合,第二减速电机308驱动滑动架302上下运动。
28.直线滑动装置3的形式不仅限于电机、齿轮和齿条配合,还可以是电缸和丝杠的配
合、皮带传动等。
29.优选的方案中,立架301上端还设有可转动的支承转轴306,支承转轴306上可套上滑轮,还设有配重块307和配重连接件309,配重连接件309可选择钢缆、皮带、链条等,配重连接件309一端与配重块307连接,配重连接件309另一端绕过支承转轴306的滑轮与滑动架302连接,配重块307用于平衡运动机构自重,降低第二减速电机308的工作负载。
30.优选的方案中,agv主体装置1包括agv小车101,agv小车101外侧套有外壳体105,外壳体105主要起支承、连接和保护的作用,agv小车101上端设有第一减速电机102和连接法兰103,第一减速电机102轴端穿过外壳体105与连接法兰103套接,连接法兰103与托运平台104下端连接。
31.优选的方案中,agv主体装置1还设有避障雷达106,避障雷达106安装在外壳体105外侧,用于识别路面障碍。
32.上述的实施例仅为本实用新型的优选技术方案,而不应视为对于本实用新型的限制,本实用新型的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本实用新型的保护范围之内。
技术特征:
1.一种回转纱架式上丝机器人,其特征是:包括agv主体装置(1),agv主体装置(1)上设有直线滑动装置(3),直线滑动装置(3)设有可上下滑动的滑动架(302),滑动架(302)上设有带夹具的多轴机器人(2),agv主体装置(1)上直线滑动装置(3)的一侧设有纱架(4),纱架(4)两侧设有多个原纱支承杆(401),原纱支承杆(401)用于放置原纱卷(5)。2.根据权利要求1所述回转纱架式上丝机器人,其特征是:agv主体装置(1)上设有可水平转动的托运平台(104),纱架(4)与托运平台(104)连接。3.根据权利要求1所述回转纱架式上丝机器人,其特征是:直线滑动装置(3)还包括立架(301),立架(301)上设有导轨滑块装置(303),滑动架(302)通过导轨滑块装置(303)与立架(301)滑动连接,立架(301)上还设有齿条(305),滑动架(302)上设有第二减速电机(308),第二减速电机(308)轴端设有齿轮(304),齿轮(304)与齿条(305)啮合。4.根据权利要求3所述回转纱架式上丝机器人,其特征是:立架(301)上端还设有可转动的支承转轴(306),还设有配重块(307)和配重连接件(309),配重连接件(309)一端与配重块(307)连接,配重连接件(309)另一端绕过支承转轴(306)与滑动架(302)连接。5.根据权利要求2所述回转纱架式上丝机器人,其特征是:agv主体装置(1)包括agv小车(101),agv小车(101)上端设有第一减速电机(102)和连接法兰(103),第一减速电机(102)轴端与连接法兰(103)套接,连接法兰(103)与托运平台(104)下端连接。6.根据权利要求5所述回转纱架式上丝机器人,其特征是:agv主体装置(1)还设有避障雷达(106),避障雷达(106)设在agv小车(101)外侧。
技术总结
本实用新型提供一种回转纱架式上丝机器人,包括AGV主体装置,AGV主体装置上设有直线滑动装置,直线滑动装置设有可上下滑动的滑动架,滑动架上设有带夹具的多轴机器人,AGV主体装置上直线滑动装置的一侧设有纱架,纱架两侧设有多个原纱支承杆,原纱支承杆用于放置原纱卷,该复合机器人能够根据生产情况,解决了传统的上纱装置上纱效率低的问题。统的上纱装置上纱效率低的问题。统的上纱装置上纱效率低的问题。
技术研发人员:吕卿青 聂俭 张丕华 张明 李小爽 莫文康 包亚勇
受保护的技术使用者:宜昌经纬纺机有限公司
技术研发日:2022.01.11
技术公布日:2022/6/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1