一种薄膜抓取的机械手结构的制作方法
本技术涉及制袋机薄膜加工,特别涉及一种薄膜抓取的机械手结构。
背景技术:
1、塑料包装袋的加工是先将整块的塑料薄膜进行热封,接着按照尺寸进行裁剪,最后对两层塑料薄膜进行封口形成。现有的制袋机加工工序中,包括热封、热切和机械手搬运等装置,其搬运方式为对剪切后堆叠若干的薄膜进行抓取,转运至下料处。但现有的机械手结构为使用线性布设的多个气缸驱动对应布设的抓取臂,由于气缸使用数量多,所需成本大幅提高,增加了企业负担,故此提出一种薄膜抓取的机械手结构以解决上述问题。
技术实现思路
1、针对现有技术的不足,本实用新型公开了一种薄膜抓取的机械手结构,本实用新型通过使用两个布设的驱动气缸,避免使用多个气缸驱动的方式,降低了企业成本,增强了实用性。
2、本实用新型通过以下技术方案予以实现:
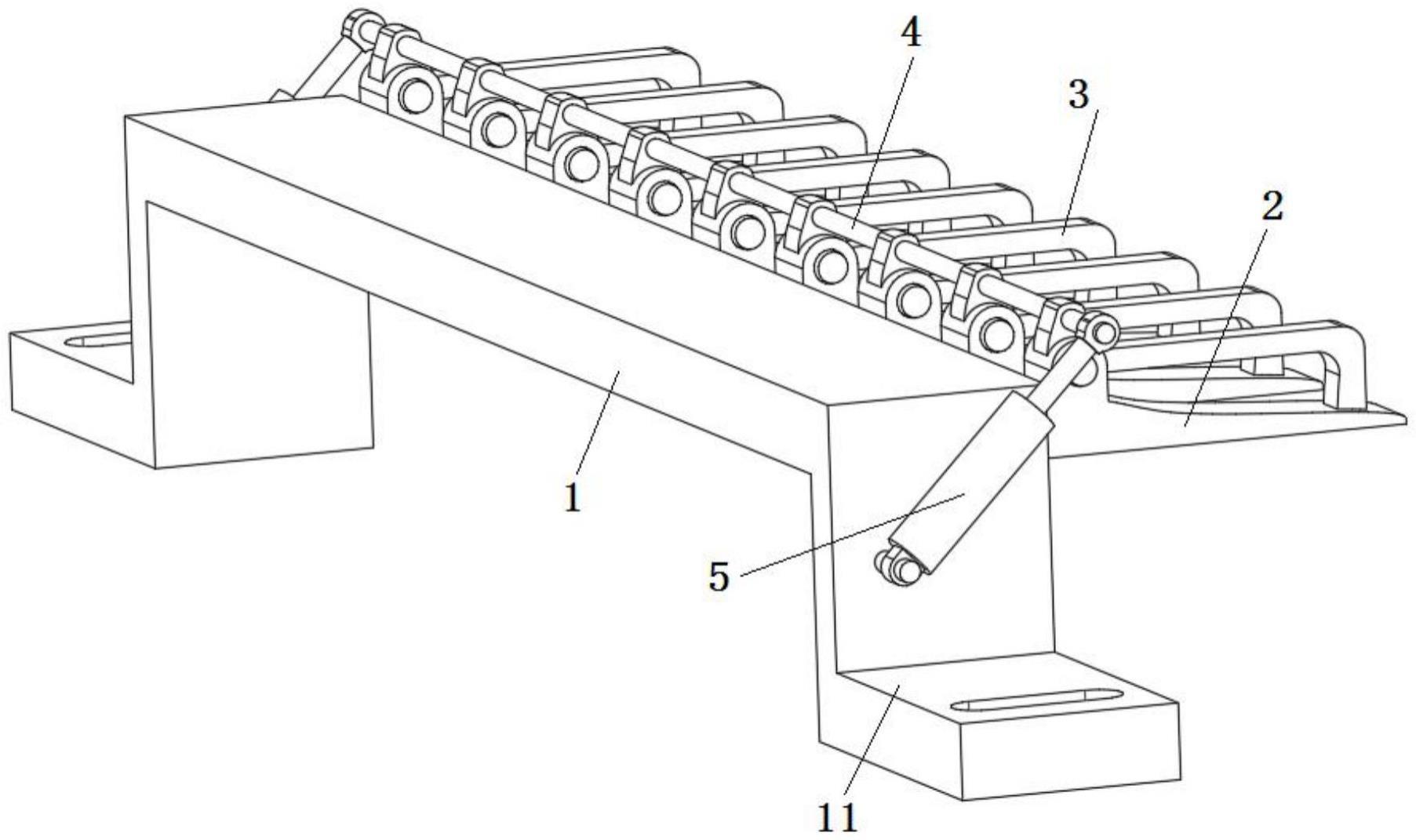
3、一种薄膜抓取的机械手结构,包括u型板,所述u型板的右侧壁上端前后线性布设有若干固定臂爪,所述固定臂爪的左端顶部转动连接有转动臂爪,前后若干所述转动臂爪上纵向固定插接有转轴,所述转轴的前后端与驱动气缸的活塞杆端铰接,所述驱动气缸的缸体部与所述u型板的前后侧壁铰接。
4、优选的,所述u型板的前后两端底部还包括一体成型连接的固定耳板,所述固定耳板上开设有腰型孔。
5、优选的,所述固定臂爪包括固定爪部和连接耳,所述固定爪部的左端顶部一体成型连接有所述连接耳。
6、优选的,所述转动臂爪包括转动爪部和转动耳,所述转动爪部的左端顶部一体成型连接有所述转动耳,且所述转动爪部呈l型杆结构设置。
7、优选的,所述连接耳与所述转动爪部之间通过销轴转动相连。
8、优选的,所述转动爪部的下端和所述固定爪部的顶部右端均设有防滑硅胶层。
9、本实用新型和现有技术相比,具有以下有益效果:
10、通过使用两个布设的驱动气缸,避免使用多个气缸驱动的方式,降低了企业成本,增强了实用性。同时转动爪部的下端和固定爪部的顶部右端均设有防滑硅胶层,增强其对薄膜的抓紧力,同时通过其防滑硅胶层的弹性作用避免对薄膜表面造成损坏。
技术特征:
1.一种薄膜抓取的机械手结构,包括u型板(1),其特征在于,所述u型板(1)的右侧壁上端前后线性布设有若干固定臂爪(2),所述固定臂爪(2)的左端顶部转动连接有转动臂爪(3),前后若干所述转动臂爪(3)上纵向固定插接有转轴(4),所述转轴(4)的前后端与驱动气缸(5)的活塞杆端铰接,所述驱动气缸(5)的缸体部与所述u型板(1)的前后侧壁铰接。
2.如权利要求1所述的一种薄膜抓取的机械手结构,其特征在于,所述u型板(1)的前后两端底部还包括一体成型连接的固定耳板(11),所述固定耳板(11)上开设有腰型孔。
3.如权利要求1所述的一种薄膜抓取的机械手结构,其特征在于,所述固定臂爪(2)包括固定爪部(21)和连接耳(22),所述固定爪部(21)的左端顶部一体成型连接有所述连接耳(22)。
4.如权利要求3所述的一种薄膜抓取的机械手结构,其特征在于,所述转动臂爪(3)包括转动爪部(31)和转动耳(32),所述转动爪部(31)的左端顶部一体成型连接有所述转动耳(32),且所述转动爪部(31)呈l型杆结构设置。
5.如权利要求4所述的一种薄膜抓取的机械手结构,其特征在于,所述连接耳(22)与所述转动爪部(31)之间通过销轴(6)转动相连。
6.如权利要求4所述的一种薄膜抓取的机械手结构,其特征在于,所述转动爪部(31)的下端和所述固定爪部(21)的顶部右端均设有防滑硅胶层。
技术总结
本技术涉及制袋机薄膜加工技术领域,特别涉及一种薄膜抓取的机械手结构,包括U型板,所述U型板的右侧壁上端前后线性布设有若干固定臂爪,所述固定臂爪的左端顶部转动连接有转动臂爪,前后若干所述转动臂爪上纵向固定插接有转轴,所述转轴的前后端与驱动气缸的活塞杆端铰接,所述驱动气缸的缸体部与所述U型板的前后侧壁铰接。本技术通过使用两个布设的驱动气缸,避免使用多个气缸驱动的方式,降低了企业成本,增强了实用性。
技术研发人员:郭金富
受保护的技术使用者:无锡市大伟机械制造有限公司
技术研发日:20230404
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!