一种倍捻机落纱机器人的制作方法
本说明书涉及纺织车间自动化制造领域,尤其涉及一种倍捻机落纱机器人。
背景技术:
1、加捻是使纱线的两个横截面发生相对扭转,这时纱条中原来平行于纱条轴线的纤维被扭转成螺旋状。纱线在织物中的捻向和捻度,对产品的外观和性能都有较大的影响。
2、倍捻机是一种加捻设备,即并线设备(多股合成一股),可以实现一转两捻,加捻效率比传统捻线设备成倍提高。倍捻机分为两层,底层放置有原纱纱桶,倍捻机通过抽纱装置抽取原纱的纱线,通过加捻装置将抽取的纱线加捻成一股绕在加捻纱筒上完成捻线。
3、在纺织生产过程中,由于产品种类规格比较多,生产量大,操作人员需求量大,劳动强度大,但是生产人员不能及时满足生产需求,这就有一种能够取代人员收筒的机器人的需求,从而从根本解决生产人力的问题。
4、现倍捻机落纱为人工作业,每条线工位多,作业人员边落纱边推动纱架,生产效率低,还有品质隐患。
5、基于此,如何提供一种自动化生产作业的倍捻机落纱机器人是本领域亟需解决的技术问题。
技术实现思路
1、本说明书实施方式目的在于提供一种取代作业员收纱,节省人力,由机器人作业,方便自动化管理,节省管理成本的一种倍捻机落纱机器人。
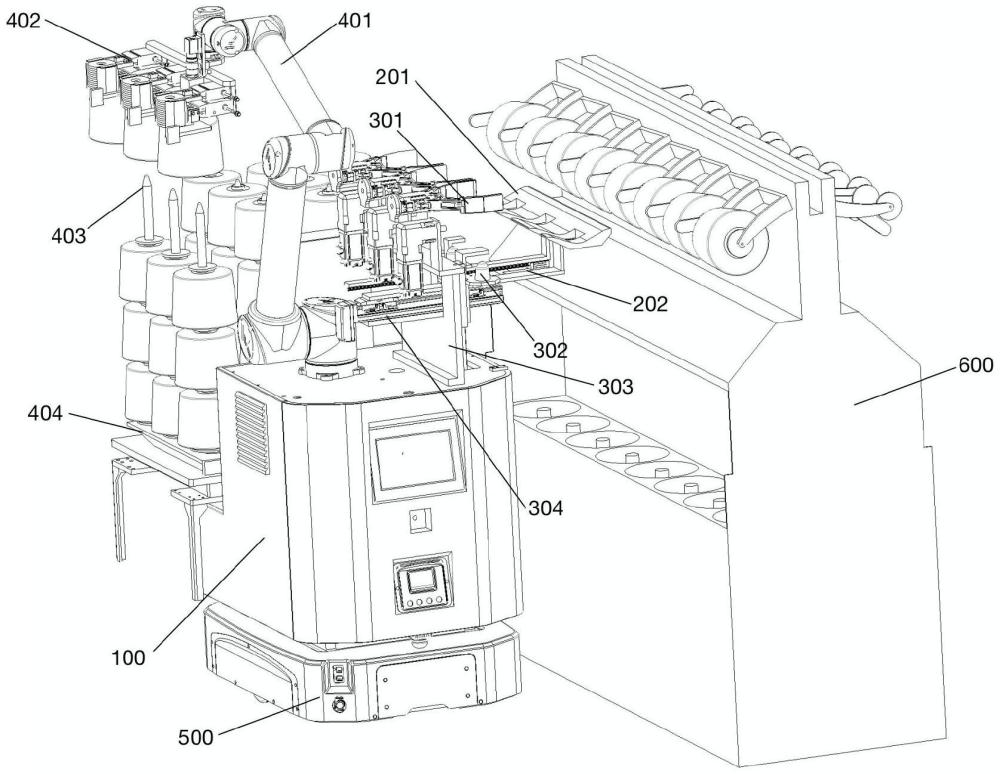
2、本说明书实施方式提供的一种倍捻机落纱机器人,包括控制柜以及设置在所述控制柜上的接纱模块、整纱模块和收纱模块,所述接纱模块包括托纱架和拨纱爪,所述托纱架设置在第一接纱滑轨上,所述第一接纱滑轨带动所述托纱架伸向纱锭架;所述拨纱爪在所述托纱架上方并设置在第二接纱滑轨上,所述第二接纱滑轨带动所述拨纱爪拨开纱锭摇架以使纱锭落在所述托纱架上;所述整纱模块包括旋转夹爪和定位装置,所述定位装置上设置多个定位柱,所述定位柱的位置与所述旋转夹爪的位置相对应,所述旋转夹爪抓取落在所述托纱架上的纱锭并将纱锭旋转以使纱锭筒管空心位置对准所述定位柱;所述收纱模块包括收纱夹爪和收纱架,所述收纱夹爪将放置在所述定位柱上的纱锭抓取至所述收纱架上。
3、优选地,所述定位装置包括定位板,所述定位板上设置有轨迹槽,所述轨迹槽内设置有凸轮随动器,所述凸轮随动器与所述定位柱连接,以使所述定位柱沿所述轨迹槽上下移动。
4、优选地,所述旋转夹爪设置在所述整纱模块的定位板顶部,伸向纱锭架的第一接纱滑轨回复到初始位置时,所述旋转夹爪抓取所述托纱架上的纱锭。
5、优选地,所述旋转夹爪住区所述托纱架上的纱锭后旋转90度,以使所述纱锭筒管空心位置对准所述定位柱。
6、优选地,每个所述旋转夹爪下方设置调整滑轨,所述调整滑轨穿过所述定位板,所述调整滑轨穿过所述定位板的位置在相邻所述定位柱之间,所述旋转夹爪在所述调整滑轨上移动已抓取所述托纱架上的纱锭。
7、优选地,所述收纱模块包括机械臂,所述收纱夹爪安装在所述机械臂上,所述收纱夹爪的数量等于所述定位柱的数量,相邻所述收纱夹爪之间的间距与所述定位柱之间的间距一致。
8、优选地,所述收纱夹爪上预放置有垫块,所述收纱夹爪将纱锭抓取至所述收纱架之后将所述垫块放置在纱锭上。
9、优选地,所述收纱架设置多个收纱层,所述收纱架设置有收纱升降装置,所述收纱升降装置初始设置在所述顶部收纱层,在一个收纱层装满纱锭后所述收纱升降装置下移至下一收纱层。
10、优选地,所述倍捻机落纱机器人包括激光导航agv小车,所述激光导航agv小车将所述倍捻机落纱机器人运载至指定工位。
11、优选地,所述收纱夹爪上设置有视觉系统,所述视觉系统识别纱锭和收纱架的位置,并根据识别的纱锭位置抓取并放置纱锭。
12、本说明书实施方式提供的一种倍捻机落纱机器人通过设置接纱模块、整纱模块、收纱模块,各模块各司其职,将纱锭架上的纱锭自动取出,节省人力,全自动化生产,提高了生产效率。
技术特征:
1.一种倍捻机落纱机器人,包括控制柜以及设置在所述控制柜上的接纱模块、整纱模块和收纱模块,其特征在于,
2.根据权利要求1所述的倍捻机落纱机器人,其特征在于,
3.根据权利要求1所述的倍捻机落纱机器人,其特征在于,
4.根据权利要求3所述的倍捻机落纱机器人,其特征在于,
5.根据权利要求3所述的倍捻机落纱机器人,其特征在于,
6.根据权利要求1所述的倍捻机落纱机器人,其特征在于,
7.根据权利要求1所述的倍捻机落纱机器人,其特征在于,
8.根据权利要求1所述的倍捻机落纱机器人,其特征在于,
9.根据权利要求1所述的倍捻机落纱机器人,其特征在于,
10.根据权利要求1所述的倍捻机落纱机器人,其特征在于,
技术总结
本说明书提供的一种倍捻机落纱机器人,包括控制柜以及设置在所述控制柜上的接纱模块、整纱模块和收纱模块,接纱模块包括托纱架和拨纱爪,托纱架设置在第一接纱滑轨上,第一接纱滑轨带动托纱架伸向纱锭架;拨纱爪在所述托纱架上方并设置在第二接纱滑轨上,第二接纱滑轨带动拨纱爪拨开纱锭摇架以使纱锭落在托纱架上;整纱模块包括旋转夹爪和定位装置,定位装置上设置多个定位柱,定位柱的位置与旋转夹爪的位置相对应,旋转夹爪抓取落在托纱架上的纱锭并将纱锭旋转以使纱锭筒管空心位置对准定位柱;收纱模块包括收纱夹爪和收纱架,收纱夹爪将放置在定位柱上的纱锭抓取至收纱架上。全自动化生产,取代作业员收纱,节省人力。
技术研发人员:袁捷,唐春晓,邓联文,黎粒
受保护的技术使用者:晟杰(江苏)机器人有限公司
技术研发日:20230717
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!