立体物印刷装置的制作方法
1.本发明涉及一种立体物印刷装置。
背景技术:
2.已知一种通过喷墨方式而在立体的工件的表面上实施印刷的立体物印刷装置。例如,在专利文献1中公开了一种立体物印刷装置,该立体物印刷装置具有向具有曲面的工件的表面喷出作为液体的一个示例的油墨的头。
3.但是,在现有技术中存在如下这样的问题,即,在工件具有倾斜度不同的两个区域的情况下,在该两个区域内会产生分辨率的差异,从而导致形成于工件的表面上的图像的品质降低。
4.专利文献1:日本特开2008-246855号公报
技术实现要素:
5.为了解决以上的课题,本发明所涉及的立体物印刷装置的一个方式具有:第一头,其设置有喷出液体的第一喷嘴列;第二头,其设置有喷出液体的第二喷嘴列;移动机构,其具备直动机构,该直动机构使所述第一头以及所述第二头相对于立体的工件的相对位置沿着第一轴而进行变化,所述工件具备彼此相邻的第一区域以及第二区域,在沿着与所述第一轴交叉的第二轴进行观察时,与所述第二区域相比,所述第一区域相对于所述第一轴的倾斜度更大,在由所述直动机构实现的移动的执行过程中,当将所述第一喷嘴列与所述第一区域对置且所述第二喷嘴列与所述第二区域对置的期间设为第一期间时,在所述第一期间内,从所述第一喷嘴列向所述第一区域以第一喷出周期来喷出液体,在所述第一期间内,从所述第二喷嘴列向所述第二区域以第二喷出周期来喷出液体,所述第一喷出周期短于所述第二喷出周期。
6.本发明所涉及的立体物印刷装置的另一个方式具有:第一头,其具备第一喷嘴面,该第一喷嘴面设置有喷出液体的第一喷嘴列;第二头,其具备第二喷嘴面,该第二喷嘴面设置有喷出液体的第二喷嘴列;移动机构,其具备直动机构,该直动机构使所述第一头以及所述第二头相对于立体的工件的相对位置沿着第一轴而进行变化,所述移动机构具备第一升降机构和第二升降机构,所述第一升降机构通过所述直动机构而被移动,且使所述第一喷嘴面沿着与所述第一轴交叉的第三轴而进行移动,所述第二升降机构通过所述直动机构而被移动,且使所述第二喷嘴面沿着所述第三轴而进行移动,当将由所述直动机构实现的移动的执行中的预定的期间设为第一期间、将在所述第一期间内所述第一喷嘴列喷出所述液体的周期设为第一喷出周期、且将在所述第一期间内所述第二喷嘴列喷出所述液体的周期设为第二喷出周期时,所述第一期间内的所述第一喷嘴面的沿着所述第三轴的移动量大于所述第二喷嘴面的沿着所述第三轴的移动量,并且所述第一喷出周期短于所述第二喷出周期。
附图说明
7.图1为表示第一实施方式所涉及的立体物印刷装置100的概要的立体图。
8.图2为对升降机构230和液体喷出单元300的关系进行说明的图。
9.图3为表示液体喷出单元300的概要结构的立体图。
10.图4为表示第一实施方式所涉及的立体物印刷装置100的电结构的框图。
11.图5为用于对印刷动作中的头310的位置进行说明的图。
12.图6为表示用于对头310的喷出周期tu进行说明的时序图。
13.图7为表示立体物印刷方法中的由控制电路530实施的与液体喷出单元300的控制有关的处理的流程图。
14.图8为表示第二实施方式所涉及的立体物印刷装置100a的电结构的框图。
15.图9为表示第一对应信息db的内容的一个示例的图。
16.图10为表示第二对应信息dc的内容的一个示例的图。
17.图11为表示第二实施方式中的处理电路620a的处理的流程图。
18.图12为表示由第二实施方式的控制电路530a实施的与液体喷出单元300的控制有关的处理的流程图。
具体实施方式
19.以下,参照附图而对用于实施本发明的方式进行说明。但是,在各个附图中,使各个部分的尺寸以及比例尺与实际情况适当地不同。此外,由于以下所叙述的实施方式为本发明的优选的具体例,因此附加了在技术上优选的各种各样的限定,但是只要在以下的说明中没有对本发明进行限定的含义的记载,则本发明的范围并不限于这些方式。
20.以下的说明适当地使用相互交叉的x轴、y轴以及z轴来进行。此外,将沿着x轴的一个方向称为x1方向,将与x1方向相反的方向称为x2方向。同样地,将沿着y轴而互为相反的方向称为y1方向以及y2方向。此外,将沿着z轴而互为相反的方向称为z1方向以及z2方向。
21.在此,x轴、y轴以及z轴为,在设置后述的工作台281的空间中所设定的基座(base)坐标系的坐标轴。典型而言,z轴为铅直的轴,z2方向相当于在铅直方向中的下方向。另外,z轴也可以不是铅直的轴。此外,虽然x轴、y轴以及z轴典型而言相互正交,但是并不限定于此,也存在不正交的情况。例如,x轴、y轴以及z轴只要以80度以上且100度以下的范围内的角度相互交叉即可。
22.1.第一实施方式
23.1-1.立体物印刷装置的概要
24.图1为表示第一实施方式所涉及的立体物印刷装置100的概要的立体图。立体物印刷装置100为通过喷墨方式而在立体的工件w的表面上实施印刷的装置。
25.工件w为印刷介质,且具有成为印刷对象的面wf。在图1所示的示例中,工件w为围绕长轴ax的呈长球状的橄榄球,面wf为曲率不固定的曲面。在本实施方式中,工件w被配置为,长轴ax与x轴平行。另外,工件w并不限定于橄榄球。例如,工件w为成为某种产品的物品,在面wf上实施印刷是指,制造该产品的一系列的工序之一。在此,工件w的形状或者大小等方式并不限定于图1所示的示例,其为任意的方式。例如,工件w的表面也可以具有平面、阶梯面或者凹凸面等面。例如,虽然图1所例示的面wf为以朝向z1方向成为凸起的方式而弯曲
了的凸曲面,但是也可以为以朝向z2方向成为凸起的方式而弯曲了的凹曲面。此外,工件w的设置姿势也并不限定于图1所示的示例,其为任意的姿势。
26.在图1所示的示例中,立体物印刷装置100为使用在两个正交的轴上进行移动的正交机械臂的喷墨打印机。具体而言,如图1所示,立体物印刷装置100具有移动机构200、四个液体喷出单元300、液体供给单元400、控制器600和工件支承机构900。四个液体喷出单元300为液体喷出单元300_1至300_4。在以下的记载中,存在分别将液体喷出单元300_1至300_4记载为液体喷出单元300的情况。以下,依次对图1所示的立体物印刷装置100的各个部分进行简单说明。
27.移动机构200使液体喷出单元300相对于工件w的相对位置进行变化。移动机构200具有直动机构220、升降机构230和支承部280。
28.直动机构220使四个液体喷出单元300相对于工件w的相对位置沿着x轴而进行变化。具体而言,直动机构220通过使液体喷出单元300沿着x轴而进行移动,从而使四个液体喷出单元300相对于工件w的相对位置沿着x轴而进行变化。直动机构220具有轨道部件221和滑架222。轨道部件221为,用于供滑架222沿着x轴而进行移动的扁平状的部件。另外,在轨道部件221的z1方向的面上设置有沿着x轴的两个轨道ra。两个轨道ra沿着x轴而延伸。滑架222以能够滑动的方式而与轨道ra相啮合。另外,虽然未图示,但是在直动机构220上设置有使滑架222移动的驱动机构。该驱动机构例如具有电机、减速器和直动编码器223,其中,所述电机产生用于该移动的驱动力,所述减速器对该驱动力进行减速并输出,所述直动编码器223对该进行了移动的动作量进行检测。在图4中示出了直动编码器223。
29.另外,x轴为“第一轴”的一个示例。
30.在本实施方式中,直动编码器223为,对沿着x轴的方向上的滑架222的位置进行检测的透射型的线性编码器。直动编码器223由标尺(scale)和光学传感器构成。标尺为,相对于轨道部件221固定且沿着x轴而配置的带状的部件,并具有透光性的基材和在该基材上以固定的间隔而被设置的遮光性的图案。光学传感器通过朝向标尺照射光并接受透过了标尺的光,从而输出与和标尺的相对位置的变化相应的信号。另外,直动编码器223只要能够检测沿着x轴的方向上的滑架222的位置即可,也可以为反射型的线性编码器或旋转编码器。
31.升降机构230使四个液体喷出单元300沿着z轴而进行移动。升降机构230具有支承板231和四个独立升降机构235。四个独立升降机构235为独立升降机构235_1至235_4。在以下的记载中,存在分别将独立升降机构235_1至235_4记载为独立升降机构235的情况。另外,存在对于独立升降机构235所具有的要素也使用_k来表示的情况。k为1至4的整数。
32.利用图2来对升降机构230和液体喷出单元300的关系进行说明。
33.图2为对升降机构230和液体喷出单元300的关系进行说明的图。图2所示的图为从y1方向朝向y2方向而对升降机构230附近进行观察的图。
34.支承板231对独立升降机构235进行支承,并被固定在滑架222上。通过滑架222沿着x轴而移动,从而被安装在滑架222上的支承板231也沿着x轴而进行移动。但是,升降机构230也可以代替支承板231而具有使四个液体喷出单元300沿着z轴一同移动的机构。
35.一个独立升降机构235使四个液体喷出单元300中的任意一个沿着z轴而进行移动。独立升降机构235被固定在支承板231上。独立升降机构235例如具有轨道板和支承板,其中,所述轨道板具有在z轴上延伸的一对轨道,所述支承板相对于轨道板的轨道以能够滑
动的方式进行啮合。在该支承板上,液体喷出单元300在通过螺纹固定等而被固定的状态下被安装,以作为末端执行器。虽然未图示,但是在独立升降机构235上设置有使液体喷出单元300沿着z轴而进行移动的驱动机构。该驱动机构例如具有电机、减速器和升降编码器236,其中,所述电机产生用于该移动的驱动力,所述减速器对该驱动力进行减速并输出,所述升降编码器236对该进行了移动的动作量进行检测。在图4中示出了升降编码器236。
36.另外,z轴为“第三轴”的一个示例。
37.在本实施方式中,升降编码器236为对沿着z轴的方向上的液体喷出单元300的位置进行检测的透射型的线性编码器,并且基本的结构与直动编码器223相同。另外,也可以为反射型的线性编码器或旋转编码器。
38.更加具体而言,在独立升降机构235_k上安装有液体喷出单元300_k。k为1至4的整数。独立升降机构235_1至235_4从x2方向起依次配置有独立升降机构235_1、235_2、235_3、235_4。
39.另外,独立升降机构235_1至235_4的任意两个中的位于x2方向上的独立升降机构235为“第一升降机构”的一个示例,该独立升降机构235的升降编码器236为“第一升降编码器”的一个示例。此外,位于x1方向上的独立升降机构235为“第二升降机构”的一个示例,该独立升降机构235的升降编码器236为“第二升降编码器”的一个示例。
40.液体喷出单元300朝向工件w喷出作为液体的一个示例的油墨。作为油墨,并未被特别地限定,例如可以列举出使染料或者颜料等颜色材料溶解于水系溶剂中的水系油墨、紫外线固化型等使用了固化性树脂的固化性油墨以及使染料或者颜料等颜色材料溶解于有机溶剂中的溶剂系油墨等。另外,该油墨并不限定于溶液,也可以为使颜色材料等作为分散质而分散在分散剂中的油墨。此外,该油墨并不限定于包含颜色材料的油墨,也可以为包含用于形成配线等的金属粒子等导电性粒子以作为分散质的油墨。在使用固化性油墨的情况下,液体喷出单元300具有射出部,该射出部射出使油墨固化的能量。
41.在本实施方式中,立体物印刷装置100作为利用包含蓝绿色的颜色材料的油墨、包含品红色的颜色材料的油墨、包含黄色的颜色材料的油墨以及包含黑色的颜色材料的油墨这四种油墨的结构来进行说明。如此,虽然在本实施方式中,由于使用四种油墨,从而使得立体物印刷装置100也具有四个液体喷出单元300,但是液体喷出单元300的个数并未被限定于四个,既可以为一个,也可以为多个。此外,所使用的油墨的种类并不限于四种,立体物印刷装置100既可以使用一种油墨,也可以使用多种油墨。例如,也可以设为,立体物印刷装置100具有六个液体喷出单元300,并且该六个液体喷出单元300分别供给上述的四种油墨、包含白色的颜色材料的油墨和透明油墨中的任意一个。利用图3来对液体喷出单元300进行详细说明。
42.图3为表示液体喷出单元300的概要结构的立体图。液体喷出单元300具有头310、压力调节阀320和传感器330。这些部件被图3中的由双点划线所示的支承体350支承。
43.头310具有未图示的多个压电元件、未图示的多个腔室和多个喷嘴n。腔室对油墨进行收纳。喷嘴n针对每个腔室而被设置,并与该腔室连通。该压电元件针对每个腔室而被设置,并通过使该腔室的压力发生变化,从而使油墨从与该腔室相对应的喷嘴n喷出。另外,作为用于使油墨从喷嘴n喷出的驱动元件,也可以代替该压电元件而使用对腔室内的油墨进行加热的加热器。另外,在理想的条件下,头310从喷嘴n向z2方向喷出油墨。也就是说,z2
方向为油墨的喷出方向。
44.头310具有设置有多个喷嘴n的喷嘴面fd。在图3所示的示例中,喷嘴面fd的法线方向为z1方向,该多个喷嘴n被划分为在沿着x轴的方向上以相互隔开间隔的方式而并列的第一喷嘴列l1和第二喷嘴列l2。第一喷嘴列l1以及第二喷嘴列l2分别为在沿着y轴的方向上排列成直线状的多个喷嘴n的集合。在此,头310中的与第一喷嘴列l1的各喷嘴n关联的要素和与第二喷嘴列l2的各喷嘴n关联的要素为在沿着x轴的方向上相互大致对称的结构。在以下的记载中,存在将第一喷嘴列l1和第二喷嘴列l2称为喷嘴列l的情况。
45.另外,液体喷出单元300_1至300_4中的被安装在相当于“第一升降机构”的独立升降机构235上的液体喷出单元300中所包含的头310为“第一头”的一个示例,该头310具有的喷嘴面fd为“第一喷嘴面”的一个示例,设置于该喷嘴面fd上的第一喷嘴列l1以及第二喷嘴列l2为“第一喷嘴列”的一个示例。此外,被安装在相当于“第二升降机构”的独立升降机构235上的液体喷出单元300中所包含的头310为“第二头”的一个示例,该头310具有的喷嘴面fd为“第二喷嘴面”的一个示例,设置于该喷嘴面fd上的第一喷嘴列l1以及第二喷嘴列l2为“第二喷嘴列”的一个示例。
46.但是,第一喷嘴列l1中的多个喷嘴n和第二喷嘴列l2中的多个喷嘴n的沿着y轴的方向上的位置既可以相互一致,也可以互不相同。此外,也可以省略与第一喷嘴列l1以及第二喷嘴列l2中的一方的各喷嘴n相关联的要素。在下文中例示了第一喷嘴列l1中的多个喷嘴n和第二喷嘴列l2中的多个喷嘴n的沿着y轴的方向上的位置相互一致的结构。
47.压力调节阀320为,根据头310内的油墨的压力而进行开闭的阀机构。通过该开闭,从而使得头310内的油墨的压力被维持为预定范围内的负压。因此,可以实现被形成于头310的喷嘴n中的油墨的弯液面的稳定化。
48.传感器330对z轴上的头310相对于工件w的相对位置关系进行检测。具体而言,传感器330为,对与相对于工件w而相对位置被固定的未图示的基准面之间的距离进行测量的光学式位移计等距离传感器。
49.支承体350例如由金属材料等构成,且为实质的刚体。另外,虽然在图3中,支承体350呈扁平的箱状,但是支承体350的形状并未被特别地限定,其为任意的形状。支承体350被安装在独立升降机构235的z2方向上。
50.在图3所示的示例中,压力调节阀320相对于头310而位于z1方向上。传感器330相对于头310而位于x1方向上。
51.在此,也可以在头310所喷出的油墨为使用了紫外线固化型等固化性树脂的固化性油墨的情况下,除了液体喷出单元300之外,还具备用于使油墨固化的紫外线光源等能量射出部。在这种情况下,优选为,能量射出部与液体喷出单元300同样地被搭载在滑架222上且在x轴方向上进行移动,并且与液体喷出单元300同样地通过独立升降机构而也在z方向上进行移动。为了使喷落在工件w上的油墨固化,在z方向上移动能量射出部的独立升降机构相对于独立升降机构235而位于如下方向的相反方向,所述方向为,在印刷动作中通过直动机构220而使头310移动的方向。虽然将在下文叙述,但是在本实施方式中,由于在印刷动作中头310从x2方向朝向x1方向而进行移动,因此,在z方向上移动能量射出部的独立升降机构相对于独立升降机构235_1而被配置在x2方向上。
52.另外,在z方向上移动能量射出部的独立升降机构为“第三升降机构”的一个示例。
53.将说明返回至图1。液体供给单元400为用于向头310供给油墨的机构。液体供给单元400具有液体贮存部410和供给流道420。
54.液体贮存部410为对油墨进行贮存的容器。液体贮存部410例如为,由具有挠性的薄膜形成的袋状的油墨包。
55.供给流道420为从液体贮存部410向头310供给油墨的流道。在供给流道420的中途处设置有压力调节阀320。因此,即使头310和液体贮存部410的位置关系伴随着移动机构200的动作而发生变化,也能够减少头310内的油墨的压力的变动。
56.另外,如图3所示,供给流道420通过压力调节阀320而被划分为上游流道421和下游流道422。即,供给流道420具有使液体贮存部410与压力调节阀320连通的上游流道421、和使压力调节阀320与头310连通的下游流道422。在图3所示的示例中,供给流道420的下游流道422的一部分由流道部件422a构成。流道部件422a具有将来自压力调节阀320的油墨分配至头310的多处的流道。
57.另外,供给流道420的一部分也可以由不具有挠性的部件构成。此外,供给流道420的一部分也可以为具有将油墨分配至多处的分配流道的结构,还可以与头310或者压力调节阀320一体构成。
58.控制器600为,对移动机构200以及工件支承机构900的驱动进行控制的机器臂控制器。虽然在图1中未图示,但是控制器600与对液体喷出单元300中的喷出动作进行控制的控制模块电连接。在控制器600以及该控制模块上,以能够通信的方式而连接有计算机。另外,该控制模块相当于后述的图4所示的控制模块500。该计算机相当于后述的图4所示的计算机700。
59.工件支承机构900对工件w进行支承,并使工件w的位置以及姿势中的一方或双方发生变化。工件支承机构900具有换行轴机构910和旋转轴机构920。换行轴机构910包括用于使工件w沿着y轴而进行移动的扁平状的部件。在该部件的z1方向的面上设置有沿着y轴的两个轨道rb。两个轨道rb沿着y轴而延伸。
60.旋转轴机构920能够以沿着x轴的旋转轴xr为中心而进行旋转。另外,旋转轴机构920具有设置面922。在设置面922上设置工件w。当旋转轴机构920进行旋转时,设置面922的朝向发生变化。当设置面922的朝向发生变化时,被设置于设置面922上的工件w的姿势发生变化。
61.另外,y轴为“第二轴”的一个示例。
62.1-2.立体物印刷装置100的电结构
63.图4为表示第一实施方式所涉及的立体物印刷装置100的电结构的框图。在图4中示出了立体物印刷装置100的结构要素中的电结构要素。此外,在图4中示出了直动编码器223和升降编码器236_1至236_4。
64.如图4所示,立体物印刷装置100除了具有上述的移动机构200、液体喷出单元300、控制器600和工件支承机构900之外,还具有控制模块500和计算机700。控制器600、控制模块500和计算机700也可以说是对液体喷出单元300、移动机构200和工件支承机构900进行控制的控制部。以下,在对控制器600进行详细说明之前,首先,依次对控制模块500以及计算机700进行说明。
65.另外,以下所叙述的电的各结构要素可以适当地分割,也可以使一部分包含在其
他的结构要素中,还可以与其他的结构要素一体构成。
66.控制器600具有对移动机构200的驱动进行控制的功能、对工件支承机构900的驱动进行控制的功能、以及生成用于使液体喷出单元300中的油墨的喷出动作与移动机构200的动作同步的信号d3的功能。控制器600具有存储电路610和处理电路620。
67.存储电路610对处理电路620所执行的各种程序和处理电路620所处理的各种数据进行存储。
68.在存储电路610中存储有路径信息da。路径信息da为,表示头310应该移动的移动路径的信息。路径信息da例如使用基座坐标系的坐标值来表示。路径信息da基于表示工件w的位置以及形状的工件信息而被决定。该工件信息通过将表示工件w的三维形状的cad(computer-aided design:计算机辅助设计)数据等信息与上述的基座坐标系建立对应关系而获得。以上的路径信息da从计算机700被输入至存储电路610中。
69.处理电路620基于路径信息da而对直动机构220、升降机构230、换行轴机构910以及旋转轴机构920的动作进行控制,并且生成信号d3。具体而言,处理电路620实施将路径信息da转换为直动机构220以及升降机构230的位置以及速度等的动作量的运算、和将路径信息da转换为换行轴机构910以及旋转轴机构920的位置以及速度等的动作量的运算。然后,处理电路620以使直动机构220以及升降机构230的各自的动作量成为上述的运算结果的方式,基于来自直动编码器223的输出信号dx和来自升降编码器236_1至236_4的输出信号dz_1至dz_4而输出控制信号sx、sz_1至sz_4。控制信号sx对直动机构220所具有的电机的驱动进行控制。控制信号sz_k对独立升降机构235_k所具有的电机的驱动进行控制。k为1至4的整数。在下文中,存在分别将输出信号dz_1至dz_4称为输出信号dz的情况。输出信号dx以及输出信号dz为脉冲信号。
70.同样地,处理电路620以使换行轴机构910以及旋转轴机构920的动作量成为上述的运算结果的方式,基于从换行轴机构910中所包含的编码器输出的输出信号dy和从旋转轴机构920中所包含的编码器输出的输出信号dr而输出控制信号sy、sr。控制信号sy对换行轴机构910所具有的电机的驱动进行控制。控制信号sr对旋转轴机构920所具有的电机的驱动进行控制。
71.此外,处理电路620基于输出信号dx、dz_1至dz_4、dy以及dr中的一个或者多个而生成信号d3。例如,处理电路620基于输出信号dx、dz_1至dz_4、dy以及dr中的一个而生成信号d3。例如,处理电路620在例如输出信号dx、dz_1至dz_4、dy以及dr中的一个成为预定值的定时,生成包含脉冲的信号以作为信号d3。
72.控制模块500为,基于从控制器600输出的信号d3和来自计算机700的印刷数据img而对头310的喷出动作进行控制的电路。控制模块500具有定时信号生成电路510、电源电路520、控制电路530和驱动信号生成电路540_1至540_4。在下文中,存在分别将驱动信号生成电路540_1至540_4称为驱动信号生成电路540的情况。
73.定时信号生成电路510基于信号d3而生成定时信号pts。定时信号pts为脉冲信号。定时信号生成电路510例如由计时器构成,所述计时器以信号d3的检测为契机而开始进行定时信号pts的生成。也就是说,信号d3作为对由液体喷出单元300实施的油墨喷出的开始定时进行规定的触发信号而发挥功能。
74.电源电路520从未图示的商用电源接受电力的供给,并生成预定的各种电位。所生
成的各种电位被适当地供给至立体物印刷装置100的各个部分。
75.控制电路530基于定时信号pts而生成控制信号si_1至si_4、波形指定信号dcom_1至dcom_4、锁存信号lat_1至lat_4、时钟信号clk、转换信号cng_1至cng_4。这些信号与定时信号pts同步。这些信号中的波形指定信号dcom_k被输入至驱动信号生成电路540_k中,且控制信号si_k、锁存信号lat_k、时钟信号clk以及转换信号cng_k被输入至液体喷出单元300_k的开关电路340中。k为1至4的整数。在以下的记载中,存在分别将控制信号si_1至si_4记载为控制信号si的情况、分别将波形指定信号dcom_1至dcom_4记载为波形指定信号dcom的情况、分别将锁存信号lat_1至lat_4记载为锁存信号lat的情况、以及分别将转换信号cng_1至cng_4记载为转换信号cng的情况。
76.控制信号si为,用于对头310所具有的压电元件的工作状态进行指定的数字信号。具体而言,控制信号si对是否向压电元件供给后述的驱动信号com进行指定。通过该指定,从而例如对是否从与压电元件相对应的喷嘴n喷出油墨进行指定,或者对从该喷嘴n喷出的油墨的量进行指定。波形指定信号dcom为用于对驱动信号com的波形进行规定的数字信号。锁存信号lat以及转换信号cng通过与控制信号si并用以对压电元件的驱动定时进行规定,从而对从喷嘴n喷出油墨的喷出定时进行规定。更加详细而言,锁存信号lat对油墨的喷出周期tu进行规定,转换信号cng为将通过锁存信号lat而被规定的一个喷出周期tu分割成多个期间的信号。时钟信号clk为,成为与定时信号pts同步的基准的时钟信号。对于以上的信号中的被输入至液体喷出单元300的开关电路340中的信号,将在下文中进行详细叙述。
77.以上的控制电路530例如包括一个以上的cpu(central processing unit:中央处理单元)等处理器。另外,控制电路530也可以代替cpu、或者除了cpu之外而包括fpga(field-programmable gate array:现场可编程逻辑门阵列)等可编程逻辑设备。
78.驱动信号生成电路540为,生成用于对头310所具有的各压电元件进行驱动的驱动信号com的电路。具体而言,驱动信号生成电路540例如具有da转换电路和放大电路。在驱动信号生成电路540中,该da转换电路将来自控制电路530的波形指定信号dcom从数字信号转换为模拟信号,该放大电路通过使用来自电源电路520的电源电位vhv来对该模拟信号进行放大从而生成驱动信号com。在此,驱动信号com中所包含的波形中的实际上被供给至压电元件的波形的信号为驱动脉冲pd。驱动脉冲pd经由开关电路340而从驱动信号生成电路540被供给至压电元件。开关电路340基于控制信号si而对是否将驱动信号com中所包含的波形中的至少一部分作为驱动脉冲pd来供给进行切换。
79.计算机700具有向控制器600供给路径信息da等信息的功能、和向控制模块500供给印刷数据img等信息的功能。作为计算机700,例如能够使用个人计算机。
80.1-3.立体物印刷装置100的动作以及立体物印刷方法
81.在第一实施方式中,立体物印刷装置100执行在从头310喷出油墨的同时通过直动机构220而使头310的位置从x2方向向x1方向移动的印刷动作。在印刷动作中,工件支承机构900不被驱动。在本实施方式的说明中,为了简单起见,例示出成为工件w的印刷对象的面wf具有倾斜区域r1和平坦区域r2的情况,其中,所述倾斜区域r1为,相对于xy平面而倾斜的平面,所述平坦区域r2为,相对于xy平面而平行的平面。在此,在将倾斜区域r1和平坦区域r2中油墨的喷出周期tu设为相同的方式中,存在倾斜区域r1的分辨率低于平坦区域r2的分辨率从而导致形成于面wf上的图像的品质降低这样的问题。在第一实施方式中,通过使倾
斜区域r1中的油墨的喷出周期tu短于平坦区域r2的油墨的喷出周期tu,从而使倾斜区域r1的分辨率和平坦区域r2的分辨率接近于相同。
82.在下文中,为了简化说明,对工件w的面wf具有倾斜区域r1以及平坦区域r2的情况下的头310_1与头310_4的喷出周期tu的差异进行说明。在以下的记载中,存在将头310_k的喷出周期tu称为喷出周期tu_k的情况。
83.另外,倾斜区域r1为“第一区域”的一个示例,平坦区域r2为“第二区域”的一个示例。此外,倾斜区域r1中的油墨的喷出周期tu为“第一喷出周期”的一个示例,平坦区域r2中的油墨的喷出周期tu为“第二喷出周期”的一个示例。在以下的记载中,存在将倾斜区域r1中的油墨的喷出周期tu称为第一喷出周期tua且将平坦区域r2中的油墨的喷出周期tu称为第二喷出周期tub的情况。
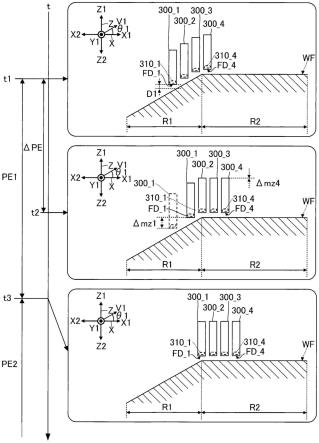
84.图5为用于对印刷动作中的头310的位置进行说明的图。如图5所示,工件w的面wf具有倾斜区域r1以及平坦区域r2。倾斜区域r1以及平坦区域r2彼此相邻。在沿着y轴进行观察时,与平坦区域r2相比,倾斜区域r1相对于x轴的倾斜度更大。在图5的示例中,倾斜区域r1为沿着v1方向的面。v1方向为,在从y1方向朝向y2方向进行观察的情况下使x1方向逆时针地旋转了θ1度的方向。θ1为大于0度且小于90度的角度。
85.印刷动作的执行期间包括第一期间pe1和第二期间pe2。第一期间pe1为,在由直动机构220实现的移动的执行过程中头310_1的喷嘴列l与倾斜区域r1对置且头310_4的喷嘴列l与平坦区域r2对置的期间。在此,喷嘴列l与区域对置是指,沿着z轴进行观察时喷嘴列l与区域重叠的情况。在图5的示例中,第一期间pe1为时刻t1起至时刻t3为止的期间。在第一期间pe1中包含时刻t2。第二期间pe2为,在由直动机构220实现的移动的执行过程中头310_1的喷嘴列l与平坦区域r2对置的期间。第二期间pe2为第一期间pe1之后的期间。在图5的示例中,第二期间pe2为从时刻t3开始的期间。
86.如图5所示,在印刷动作中,z轴上的头310与面wf之间的距离d1被维持在预定范围内。当距离d1未被适当地维持时,存在头310喷出来的油墨的飞翔距离变长而使得喷落在工件w上的位置的精度降低的情况。为了维持距离d1,针对k为1至4的每一个,独立升降机构235_k使喷嘴面fd_k向z2方向进行移动。
87.此外,在能量射出部被搭载于滑架222上的情况下,能量射出部的射出面与面wf之间的距离也被维持在适当的范围内。这是因为,当该距离未被适当地维持时,存在从能量射出部射出的能量衰减而使得油墨的固化不充分的情况。
88.为了求出平坦区域r2中的油墨的喷出周期tu相对于倾斜区域r1中的油墨的喷出周期tu的比,控制电路530在比当前更靠前的固定期间内求出喷嘴面fd_4的移动量m4相对于喷嘴面fd_1的移动量m1的比。固定期间可以是任意的期间,但是,越是相比当前更近且越短的期间,在工件w的面wf的倾斜发生了变化的情况下,越是易于追随面wf的倾斜,因此越是能够使面wf的分辨率接近均匀。在以下的记载中,将固定期间设为从时刻t1起至时刻t2为止的期间δpe来进行说明。
89.在图5的时刻t2处,利用虚线来表示时刻t1处的液体喷出单元300_1,并示出了在期间δpe内由独立升降机构235_1实现的喷嘴面fd_1的z轴上的移动量δmz1。另一方面,在期间δpe内,独立升降机构235_4使头310_4几乎不移动。因此,在期间δpe内,由独立升降机构235_4实现的喷嘴面fd_4的z轴上的移动量δmz4大致为零。在期间δpe内,由独立升降
机构235_1实现的喷嘴面fd_1的移动量δmz1大于由独立升降机构235_4实现的喷嘴面fd_4的移动量δmz4。
90.如此,在期间δpe内,与喷嘴面fd_4相比,喷嘴面fd_1的移动量更大。更加具体而言,期间δpe内的喷嘴面fd_1的移动量δm1通过下式(1)来表示。
91.数学式1
[0092][0093]
δmz1为与在期间δpe内获得的输出信号dz_1的脉冲数成比例的值。δmx为在期间δpe内喷嘴面fd_1的沿着x轴的移动量。δmx为与在期间δpe内获得的输出信号dx的脉冲数成比例的值。同样地,第一期间pe1中的喷嘴面fd_4的移动量δm4通过下式(2)来表示。另外,期间δpe内的喷嘴面fd_1的沿着x轴的移动量和期间δpe内的喷嘴面fd_4的沿着x轴的移动量相同。输出信号dx的脉冲数为“脉冲信号的数量”的一个示例。
[0094]
数学式2
[0095][0096]
其中,由于δmz4大致为零,因此,式(2)能够变形为式(3)。
[0097]
δm4=δmx(3)
[0098]
因此,喷嘴面fd_4的移动量δm4相对于喷嘴面fd_1的移动量δm1的比通过下式(4)来表示。
[0099]
数学式3
[0100][0101]
为了使倾斜区域r1的分辨率和平坦区域r2的分辨率接近于相同,控制电路530决定为,使头310_1的喷出周期tu_1成为头310_4的喷出周期tu_4的δm4/δm1倍。δm4/δm1为大于零且小于1的值。也就是说,使喷出周期tu_1短于喷出周期tu_4。如上述的那样,由于倾斜区域r1中的油墨的喷出周期tu为第一喷出周期tua,因此第一期间pe1内的喷出周期tu_1为第一喷出周期tua。同样地,由于平坦区域r2中的油墨的喷出周期tu为第二喷出周期tub,因此第一期间pe1内的喷出周期tu_4为第二喷出周期tub。另外,第二期间pe2中的喷出周期tu_1为第二喷出周期tub。例如,在平坦区域r2中,在作为基准分辨率而实现600dpi(dotsperinch:每英寸点数)的情况下,平坦区域r2中的两个点的间隔约为42μm。因此,倾斜区域r1的沿着z轴观察时的两个点间隔只要约为42μm
×
δm4/δm1即可。在通过式(4)而求出δm4/δm1的情况下,控制电路530只要向δmz1中代入在期间δpe内获得的输出信号dz_1的脉冲数且向δmx中代入在期间δpe内获得的输出信号dx的脉冲数即可。然后,控制电路530决定为,使在平坦区域r2中头310移动与基准分辨率相应的点间隔所花费的期间乘以δm4/δm1所得的期间成为头310_1的喷出周期tu_1。即,喷出周期tu_1基于输出信号dx和输出信号dz_1而被规定。此外,喷出周期tu_4基于输出信号dx和输出信号dz_4而被规定。利用图6来对变更头310的喷出周期tu的情况下的头310的喷出周期tu的一个示例进行说明。
[0102]
图6为用于对头310的喷出周期tu进行说明的时序图。为了将说明简化,在图6的示例中,使用δm4/δm1为3/4的情况来进行说明。在图6的示例中,控制电路530将通过来自直
动编码器223的输出信号dx的三个量的脉冲而被规定的期间决定作为头310_1的喷出周期tu_1,将通过输出信号dx的四个量的脉冲而被规定的期间决定作为头310_4的喷出周期tu_4。
[0103]
控制电路530将包含表示喷出周期tu_1的脉冲pl_1的锁存信号lat_1输出至液体喷出单元300_1。也就是说,锁存信号lat_1在通过输出信号dx的三个量的脉冲而被规定的定时被输出。喷出周期tu作为从脉冲pl_1的上升沿起至下一个脉冲pl_1的上升沿为止的期间而被规定。控制电路530将转换信号cng_1输出至液体喷出单元300_1。转换信号cng_1包含用于将一个喷出周期tu_1划分为控制期间tbu1和控制期间tbu2的脉冲pc_1。控制期间tbu1例如为,从脉冲pl_1的上升沿起至脉冲pc_1的上升沿为止的期间。控制期间tbu2例如为,从脉冲pc_1的上升沿起至脉冲pl_1的上升沿为止的期间。
[0104]
此外,控制电路530在每个喷出周期tu_1而将控制信号si_1输出至液体喷出单元300_1。也就是说,控制信号si_1在通过输出信号dx的三个量的脉冲而被规定的定时被输出。控制信号si_1具有对头310_1所具有的多个压电元件的动作种类进行指定的独立指定信号sd_1。独立指定信号sd_1具有与头310_1所具有的多个压电元件各自相对应的个数。在以下的记载中,存在将控制信号si_k中所包含的独立指定信号sd记载为独立指定信号sd_k的情况。此外,存在将独立指定信号sd_1至独立指定信号sd_4分别记载为独立指定信号sd的情况。
[0105]
此外,控制电路530将包含表示喷出周期tu_4的脉冲pl_4的锁存信号lat_4输出至液体喷出单元300_4。也就是说,锁存信号lat_4在通过输出信号dx的四个量的脉冲而被规定的定时被输出。控制电路530将转换信号cng_4输出至液体喷出单元300_4。转换信号cng_4包含用于将一个喷出周期tu_1划分成控制期间tbu3和控制期间tbu4的脉冲pc_4。控制期间tbu3例如为,从脉冲pl_4的上升沿起至脉冲pc_4的上升沿为止的期间。控制期间tbu4例如为,从脉冲pc_4的上升沿起至脉冲pl_4的上升沿为止的期间。
[0106]
此外,控制电路530在每个喷出周期tu_4而将控制信号si_4输出至液体喷出单元300_4。也就是说,控制信号si_4在通过输出信号dx的四个量的脉冲而被规定的定时被输出。控制信号si_4具有对头310_4所具有的多个压电元件的动作的种类进行指定的独立指定信号sd_4。独立指定信号sd_4存在与头310_4所具有的多个压电元件各自相对应的数量。
[0107]
如以上那样,通过针对每个头310而对规定锁存信号lat和控制信号si的定时的输出信号dx的脉冲的数量进行调节,从而能够使喷出周期tu针对每个头310而进行变化。
[0108]
如图6所示,驱动信号com_1以及驱动信号com_4具有在控制期间tbu1内所设置的波形px和控制期间tbu2内所设置的波形py。在图6所示的示例中,波形px中的最高电位vhx与最低电位vlx的电位差大于波形py中的最高电位vhy与最低电位vly的电位差。另外,驱动信号com的波形并不限定于图6所示的示例,例如也可以省略波形py。
[0109]
对与独立指定信号sd的内容相应的油墨的喷出方式进行说明。在本实施方式中,独立指定信号sd为对大点、中点、小点以及未喷出中的任意一个进行指定的值。例如,在独立指定信号sd_1为对中点的形成进行指定的值的情况下,开关电路340在控制期间tbu1内成为导通,并且在控制期间tbu2内成为断开。因此,只有驱动信号com_1中的波形px作为驱动脉冲pd而被供给至压电元件,相当于中点的量的油墨被喷出。
[0110]
如以上那样,通过根据独立指定信号sd的内容而对压电元件指定是否供给波形
px、或者是否供给波形pf,从而能够使喷出的油墨滴的有无或尺寸发生变化。另外,虽然利用驱动信号com_1的示例来进行了说明,但是驱动信号com_4也与驱动信号com_1是相同的方式。
[0111]
图7为表示立体物印刷方法中的由控制电路530实施的与液体喷出单元300的控制有关的处理的流程图。控制电路530针对k为1至4的每一个,而对头310_k执行图7所示的一系列的流程。图7所示的一系列的流程为,针对每个喷出周期tu而决定下一个喷出周期tu的处理。
[0112]
在步骤s10中,控制电路530对印刷动作是否结束进行判断。印刷动作结束的情况是指,例如,头310_k到达印刷结束位置的情况、或者由立体物印刷装置100的用户指示了印刷动作的中止的情况。在步骤s10中为“是”的情况下,控制电路530结束图7所示的一系列的处理。
[0113]
在步骤s10中为“否”的情况下,控制电路530在步骤s20中基于直动编码器223输出的输出信号dx而取得期间δpe内的输出信号dx的脉冲数。另外,控制电路530在步骤s30中基于升降编码器236_k输出的输出信号dz_k而取得期间δpe内的输出信号dz_k的脉冲数。
[0114]
在步骤s30的处理结束后,控制电路530在步骤s40中基于输出信号dx的脉冲数和输出信号dz_k的脉冲数而决定下一个喷出周期tu_k。具体而言,控制电路530决定为,使在平坦区域r2中头310移动与基准分辨率相应的点间隔所花费的期间乘以通过式(4)计算出的δm4/δm1所得的值成为下一个喷出周期tu_k。
[0115]
在步骤s40的处理结束后,控制电路530在步骤s50中将与所决定的喷出周期tu_k相应的波形指定信号dcom_k输出至驱动信号生成电路540_k。另外,控制电路530在步骤s60中将与所决定的喷出周期tu_k相应的控制信号si_k、锁存信号lat_k和转换信号cng_k输出至液体喷出单元300_k。
[0116]
在步骤s60的处理结束后,控制电路530在步骤s70中待机至输出下一个波形指定信号dcom_k的定时为止,并将处理返回至步骤s10。输出下一个波形指定信号dcom_k的定时是指,在所决定的喷出周期tu_k届满的时刻之前,且即使在该定时届满后执行步骤s20至步骤s60,也能够无延迟地输出下一个波形指定信号dcom_k、控制信号si_k、锁存信号lat_k和转换信号cng_k的时刻。
[0117]
1-4.第一实施方式的总结
[0118]
以下,使用头310_1相当于“第一头”、且头310_4相当于“第二头”的示例,来对第一实施方式的总结进行说明。
[0119]
立体物印刷装置100具有:头310_1,其设置有喷出油墨的喷嘴列l;头310_4,其设置有喷出油墨的喷嘴列l;移动机构200,其具备直动机构220,该直动机构220使头310_1以及头310_4相对于立体的工件w的相对位置沿着x轴而进行变化。工件w具备彼此相邻的倾斜区域r1以及平坦区域r2。在沿着与x轴交叉的y轴进行观察时,与平坦区域r2相比,倾斜区域r1相对于x轴的倾斜度更大。在由直动机构220实现的移动的执行过程中,当将头310_1的喷嘴列l与倾斜区域r1对置且头310_4的喷嘴列l与平坦区域r2对置的期间设为第一期间pe1时,在第一期间pe1内,从头310_1的喷嘴列l向倾斜区域r1以喷出周期tu_1来喷出油墨。此外,在第一期间pe1内,从头310_4的喷嘴列l向平坦区域r2以喷出周期tu_4来喷出油墨。喷出周期tu_1短于喷出周期tu_4。
[0120]
如上所述,在倾斜区域r1和平坦区域r2中油墨的喷出周期tu相同的方式中,存在倾斜区域r1的分辨率低于平坦区域r2的分辨率从而导致形成于面wf上的图像的品质降低的问题。在本实施方式中,通过使喷出周期tu_1短于喷出周期tu_4,从而与在倾斜区域r1和平坦区域r2中油墨的喷出周期tu相同的方式相比,能够使倾斜区域r1的分辨率和平坦区域r2的分辨率接近于相同。
[0121]
虽然在本实施方式的说明中,为了简单起见,例示出成为工件w的印刷对象的面wf具有作为相对于xy平面而倾斜的平面的倾斜区域r1和作为相对于xy平面而平行的平面的平坦区域r2的情况,但是本发明并不限定于此。工件w的面wf也可以为曲面。在面wf为曲面的情况下,以将该曲面适当地分割而成的多个平面来近似,并且能够基于在该平面的沿着y轴观察时的相对于x轴的倾斜度而分类为倾斜区域r1和平坦区域r2。另外,平坦区域r2并不一定是与x轴和y轴平行的面。此外,在面wf为曲面的情况下,优选为,喷出周期tu根据滑架222的移动而逐渐发生变化,并且在对各期间内的喷出周期tu进行比较的情况下,能够使用逐渐变化的喷出周期tu的平均值等。
[0122]
此外,在由直动机构220实现的移动的执行过程中,当将头310_1的喷嘴列l与平坦区域r2对置的期间设为第二期间pe2时,在第二期间pe2内,从头310_1的喷嘴列l向平坦区域r2以第二喷出周期tub来喷出油墨。
[0123]
通过在头310_1的喷嘴列l与平坦区域r2对置的期间内从头310_1的喷嘴列l以第二喷出周期tub来喷出油墨,从而使头310_1对倾斜区域r1以及平坦区域r2进行印刷时的分辨率接近均匀。
[0124]
头310_1的喷嘴列l被设置在头310_1的喷嘴面fd_1上,头310_4的喷嘴列l被设置在头310_4的喷嘴面fd_4上。移动机构200具备独立升降机构235_1和独立升降机构235_4,独立升降机构235_1通过直动机构220而被移动,且使喷嘴面fd_1沿着与x轴以及y轴交叉的z轴而进行移动,独立升降机构235_4通过直动机构220而被移动,且使喷嘴面fd_4沿着z轴而进行移动。
[0125]
由于头310通过各自的独立升降机构235来进行升降,因此与头310_1至310通过一个独立升降机构235来进行升降的方式相比,能够更进一步深入于工件w的凹凸,因此,能够在抑制与工件w的接触的同时以适当的距离来实现油墨的喷出,由此能够提高印刷品质。
[0126]
此外,在第一期间pe1内,由独立升降机构235_1实现的喷嘴面fd_1的移动量mz1大于由独立升降机构235_4实现的喷嘴面fd_4的移动量mz4。
[0127]
在沿着y轴进行观察时,由于与平坦区域r2相比,倾斜区域r1相对于x轴的倾斜度更大,因此,通过使移动量mz1大于移动量mz4,从而头310_1能够追随于倾斜区域r1。
[0128]
此外,也可以说,立体物印刷装置100具有:头310_1,其具备喷嘴面fd_1,该喷嘴面fd_1设置有喷出油墨的喷嘴列l;头310_4,其具备喷嘴面fd_4,该喷嘴面fd_4设置有喷出油墨的喷嘴列l;移动机构200,其具备直动机构220,该直动机构220使头310_1以及头310_4相对于立体的工件w的相对位置沿着x轴而进行变化。移动机构200具备独立升降机构235_1和独立升降机构235_4,独立升降机构235_1通过直动机构220而被移动,且使喷嘴面fd_1沿着与x轴交叉的z轴而进行移动,独立升降机构235_4通过直动机构220而被移动,且使喷嘴面fd_4沿着z轴而进行移动。当将由直动机构220实现的移动的执行过程中的预定的期间设为第一期间pe1、将在第一期间pe1内设置于喷嘴面fd_1上的喷嘴列l喷出油墨的周期设为第
一喷出周期tua、且将在第一期间pe1内设置于喷嘴面fd_4上的喷嘴列l喷出油墨的周期设为第二喷出周期tub时,第一期间pe1内的喷嘴面fd_1的沿着z轴的移动量mz1大于喷嘴面fd_4的沿着z轴的移动量mz4,并且第一喷出周期tua短于第二喷出周期tub。
[0129]
根据第一实施方式,即使为通过直动机构220而进行移动的多个头310,也能够通过高频地对上下移动幅度较大的头310进行驱动,从而抑制形成于面wf上的图像的分辨率的降低。
[0130]
此外,在由直动机构220实现的移动的执行过程中,当将比第一期间pe1靠后的期间设为第二期间pe2时,在第二期间pe2内,头310_1的喷嘴列l以第二喷出周期tub来喷出油墨。
[0131]
通过在头310_1的喷嘴列l与平坦区域r2对置的期间内从头310_1的喷嘴列l以第二喷出周期tub来喷出油墨,从而即使在平坦区域r2中也能够均匀地对分辨率进行设定。
[0132]
工件w具备彼此相邻的倾斜区域r1以及平坦区域r2。在沿着与x轴和z轴交叉的y轴进行观察时,与平坦区域r2相比,倾斜区域r1相对于x轴的倾斜度更大,在第一期间pe1内,头310_1的喷嘴列l与倾斜区域r1对置,且头310_4的喷嘴列l与平坦区域r2对置。
[0133]
在第一实施方式中,通过使倾斜区域r1中的油墨的喷出周期tu_1短于平坦区域r2中的油墨的喷出周期tu_4,从而与油墨的喷出周期tu在倾斜区域r1和平坦区域r2中相同的方式相比,能够使倾斜区域r1的分辨率和平坦区域r2的分辨率接近于相同。
[0134]
移动机构200具备:直动编码器223,其根据头310_1以及头310_4相对于工件w的沿着x轴的相对移动量而对输出信号dx进行输出;升降编码器236_1,其根据独立升降机构235_1的动作量来输出信号;升降编码器236_4,其根据独立升降机构235_4的动作量来输出信号。在第一期间pe1内,第一喷出周期tua基于直动编码器223的输出信号dx和升降编码器236_1的输出信号dz_1而被规定,第二喷出周期tub基于直动编码器223的输出信号dx和升降编码器236的输出信号dz而被规定。
[0135]
通过使第一喷出周期tua基于输出信号dx和输出信号dz_1而被规定,从而能够将喷出周期tu设定为与工件w的倾斜度相应的长度,因此能够设定为适当的喷出周期tu。
[0136]
2.第二实施方式
[0137]
在第一实施方式中的立体物印刷方法中,针对k为1至4的每一个,喷出周期tu_k基于直动编码器223的输出信号dx和升降编码器236_k的输出信号dz_k而被规定。另一方面,在第二实施方式中的立体物印刷方法中,与第一实施方式不同的点在于,针对k为1至4的每一个,喷出周期tu_k基于直动编码器223的输出信号dx而被规定,而不基于输出信号dz_k。
[0138]
2-1.立体物印刷装置100a的电结构
[0139]
图8为表示第二实施方式所涉及的立体物印刷装置100a的电结构的框图。立体物印刷装置100a在代替控制模块500而具有控制模块500a、且代替控制器600而具有控制器600a的这一点上与立体物印刷装置100的不同。
[0140]
控制模块500a在代替控制电路530而具有控制电路530a、并且还具有存储电路560的这一点上与控制模块500的不同。控制电路530a在不被输入输出信号dz_1至dz_4的这一点上与控制电路530的不同。
[0141]
存储电路560对控制电路530a所执行的各种程序和控制电路530a所处理的各种数据进行存储。存储电路560例如ram等易失性的存储器和rom、eeprom或者prom等非易失性存
储器中的一方或双方的半导体存储器。另外,存储电路560的一部分或全部也可以被包含在控制电路530a中。
[0142]
在存储电路560中存储有第一对应信息db。第一对应信息db表示直动编码器223所输出的输出信号dx的脉冲数与头310_1至310_4的各自的喷出周期tu的对应关系。利用图9而对第一对应信息db的具体例进行说明。
[0143]
图9为表示第一对应信息db的内容的一个示例的图。为了简化说明,图9所示的第一对应信息db仅示出头310_1的喷出周期tu_1和头310_4的喷出周期tu_4。图9所示的第一对应信息db示出了在工件w如图5所示的那样具有倾斜区域r1和平坦区域r2的情况下输出信号dx的脉冲数、头310_1的喷出周期tu_1和头310_4的喷出周期tu_4的关系。图9所示的cnt表示,将头310_1位于倾斜区域r1的最靠x2方向侧的状态下的输出信号dx的脉冲数设为零时的当前的头310_1所处的状态下的输出信号dx的当前的脉冲数。也就是说,cnt为,对伴随着滑架222的沿着x轴的方向的移动而被逐次输出的输出信号dx的脉冲的数量进行了累计所得的值。图9所示的pa为,在头310_1的喷嘴列l成为与平坦区域r2的x2方向的端部所对置的位置的情况下的输出信号dx的脉冲数。图9所示的第一对应信息db表示,在脉冲数cnt为0以上且小于pa时,头310_1的喷出周期tu_1为第一喷出周期tua,头310_4的喷出周期tu_4为第二喷出周期tub。另外,图9所示的第一对应信息db表示,在脉冲数cnt为pa以上时,头310_1的喷出周期tu_1以及头310_4的喷出周期tu_4为第二喷出周期tub。
[0144]
如图9所示,头310_1的喷出周期tu_1以及头310_4的喷出周期tu_4基于直动编码器223所输出的输出信号dx的脉冲数而被规定。另外,头310_1以第一喷出周期tua而喷出油墨的情况下的输出信号dx的脉冲数少于头310_1以第二喷出周期tub而喷出油墨的情况下的输出信号dx的脉冲数。
[0145]
将说明返回至图8。控制器600a在代替存储电路610而具有存储电路610a且代替处理电路620而具有处理电路620a的这一点上与控制器600不同。
[0146]
存储电路610a在对第二对应信息dc进行存储的这一点上与存储电路610不同。第二对应信息dc为,表示直动编码器223所输出的输出信号dx的脉冲数与由独立升降机构235_1至235_4的各自实现的喷嘴面fd_1至fd_4的移动量的对应关系的信息。利用图10而对第二对应信息dc的具体例进行说明。
[0147]
图10为表示第二对应信息dc的内容的一个示例的图。为了简化说明,图10所示的第二对应信息dc仅示出了喷嘴面fd_1的z轴上的移动量和喷嘴面fd_4的z轴上的移动量。图10所示的第二对应信息dc示出了在工件w如图5所示那样具有倾斜区域r1和平坦区域r2的情况下输出信号dx的脉冲数、喷嘴面fd_1的移动量和喷嘴面fd_4的移动量的关系。图10所示的pa以及cnt为与图9所示的pa以及cnt相同的意思。图10所示的第二对应信息dc表示,在脉冲数cnt为0以上且小于pa时喷嘴面fd_1的移动量为mz1且喷嘴面fd_4的移动量为零的情况。另外,图10所示的第二对应信息dc表示在脉冲数cnt为pa以上时喷嘴面fd_1的移动量以及喷嘴面fd_4的移动量为零的情况。
[0148]
如图10所示,独立升降机构235_1和独立升降机构235_4的动作基于直动编码器223所输出的输出信号dx而被规定。
[0149]
对第一对应信息db以及第二对应信息dc的生成例进行说明。第一对应信息db以及第二对应信息dc既可以通过处理电路620a来生成,也可以通过计算机700来生成,还可以通
过控制电路530a来生成,又可以通过立体物印刷装置100的外部的装置来生成。在下文中,对第一对应信息db以及第二对应信息dc通过处理电路620a来生成的示例进行说明。此外,第一对应信息db以及第二对应信息dc被生成的定时为印刷动作之前。
[0150]
处理电路620a基于表示工件w的位置以及形状的工件信息而生成第一对应信息db以及第二对应信息dc。例如,处理电路620a基于工件信息,而将工件w配置在对xyz空间进行模拟的假想的三维空间中。存储电路610a对表示独立升降机构235_1至235_4的各自的相对于滑架222的位置的位置信息进行存储,处理电路620a针对输出信号dx的每个脉冲数,基于该位置信息而将独立升降机构235_1至235_4分别配置在该假想的三维空间中。另外,处理电路620a在该假想的三维空间中针对每个输出信号dx的脉冲数,而以使与面wf的距离d1成为预定范围的方式来配置喷嘴面fd_1至fd_4。处理电路620a将此时的喷嘴面fd_1至fd_4的移动量存储在第二对应信息dc中。另外,处理电路620a根据头310_1至310_4的喷嘴列l所对置的面的相对于x轴的倾斜度来决定喷出周期tu。在输出信号dx的脉冲数为第一脉冲数的情况下,如果头310_1的喷嘴列l处于与倾斜区域r1对置的位置,则处理电路620a将第一脉冲数的头310_1的喷出周期tu_1决定为第一喷出周期tua,如果头310_1的喷嘴列l处于与平坦区域r2对置的位置,则将第一脉冲数中的头310_4的喷出周期tu_4决定为第二喷出周期tub。关于头310_4也为同样的方式,例如,在输出信号dx的脉冲数为第一脉冲数的情况下,如果头310_4的喷嘴列l处于与平坦区域r2对置的位置,则处理电路620a将第一脉冲数中的头310_4的喷出周期tu_4决定为第二喷出周期tub。
[0151]
另外,也对能量射出部被搭载于滑架222上的情况进行说明。存储电路610a对表示使能量射出部在z方向上移动的独立升降机构相对于滑架222的位置的位置信息进行存储,处理电路620a针对每个输出信号dx的脉冲数,基于该位置信息来配置该独立升降机构。另外,处理电路620a针对每个输出信号dx的脉冲数,而以使能量射出部的射出面与面wf的距离成为适当的距离的方式将能量射出部配置在假想的三维空间中。处理电路620a将此时的能量射出部的射出面的移动量存储在第二对应信息dc中。
[0152]
处理电路620a将第一对应信息db发送至控制模块500a。控制电路530a将第一对应信息db存储在存储电路560中。
[0153]
2-2.立体物印刷装置100a的动作以及立体物印刷方法
[0154]
利用图11以及图12来对立体物印刷装置100a的动作进行说明。
[0155]
图11为表示由第二实施方式中的控制器600的处理电路620a实施的与独立升降机构235的控制有关的处理的流程图。在步骤s110中,处理电路620a对印刷动作是否结束进行判断。在步骤s110中为“是”的情况下,处理电路620a结束图11所示的一系列的处理。
[0156]
在步骤s110为“否”的情况下,处理电路620a在步骤s120中取得输出信号dx的当前的脉冲数cnt。接下来,处理电路620a在步骤s130中基于输出信号dx的脉冲数cnt和第二对应信息dc而分别决定喷嘴面fd_1至fd_4的移动量。
[0157]
另外,在头310_1为“第一头”的一个示例的情况下,喷嘴面fd_1的移动量为“第一移动量”的一个示例。此外,在头310_4为“第二头”的一个示例的情况下,喷嘴面fd_4的移动量为“第二移动量”的一个示例。
[0158]
然后,处理电路620a在步骤s140中将与喷嘴面fd_1至fd_4的移动量相应的控制信号sz_1至sz_4分别输出至独立升降机构235_1至235_4。
[0159]
图12为表示由第二实施方式的控制电路530a实施的与液体喷出单元300的控制有关的处理的流程图。控制电路530a针对k为1至4的每一个而对头310_k执行图12所示的一系列的流程。但是,图12所示的流程图与图7所示的流程图相比,在不执行步骤s20、步骤s30以及步骤s40的处理而执行步骤s210以及步骤s220的处理的这一点上有所不同,而其他的点则一致。因此,仅对步骤s210以及步骤s220进行说明。
[0160]
在步骤s10为“否”的情况下,控制电路530a在步骤s210中取得输出信号dx的当前的脉冲数cnt。接下来,处理电路620a在步骤s220中,基于输出信号dx的脉冲数cnt和第一对应信息db来决定下一个喷出周期tu_k。在步骤s220的处理结束后,控制电路530a执行步骤s50的处理。
[0161]
另外,虽然图12所示的一系列的流程图的所有步骤均由控制电路530a来执行,但是并不限于此。例如,也可以使存储电路610a存储第一对应信息db,并由处理电路620a执行步骤s210的处理和步骤s220的处理,并且将所决定的喷出周期tu_k通知给控制模块500a。
[0162]
2-3.第二实施方式的总结
[0163]
以下,利用头310_1相当于“第一头”且头310_4相当于“第二头”的示例,来对第二实施方式的总结进行说明。
[0164]
移动机构200具备直动编码器223,所述直动编码器223根据第一头以及第二头相对于工件w的沿着x轴的相对移动量来输出脉冲信号。
[0165]
第一喷出周期tua和第二喷出周期tub基于直动编码器223所输出的输出信号dx的脉冲数cnt而被规定,头310_1以第一喷出周期tua来喷出油墨的情况下的脉冲信号的数量小于头310_1以第二喷出周期tub来喷出油墨的情况下的脉冲信号的数量。
[0166]
根据第二实施方式,由于能够基于第一对应信息db来决定与脉冲数cnt相对应的喷出周期tu,因此在与第一实施方式相比时,能够以式(4)的执行所花费的期间的量而提前决定喷出周期tu。也就是说,能够缩短控制电路530中的运算所需的时间,从而能够减少时滞。
[0167]
此外,独立升降机构235_1和独立升降机构235_4的动作基于直动编码器223所输出的输出信号dx的脉冲数cnt而被规定。
[0168]
根据第二实施方式,能够基于第二对应信息dc来适当地决定与脉冲数cnt相对应的喷嘴面fd_1至fd_4的移动量。
[0169]
另外,优选为,在能量射出部被搭载于滑架222上的情况下,与使该能量射出部在z方向上移动的独立升降机构的动作同样地,基于直动编码器223所输出的输出信号dx的脉冲数cnt来规定。根据这样的结构,能够对应于脉冲数cnt而适当地决定该能量射出部的移动量。
[0170]
此外,控制电路530a基于直动编码器223所输出的输出信号dx的脉冲数cnt和第一对应信息db来决定第一喷出周期tua以及第二喷出周期tub。处理电路620a在第一期间pe1内基于直动编码器223所输出的输出信号dx的脉冲数cnt和第二对应信息dc来决定喷嘴面fd_1的移动量以及喷嘴面fd_4的移动量。
[0171]
控制电路530a在第一期间pe1内执行如下处理,即,以用第一喷出周期tua来喷出油墨的方式而对头310_1进行控制的处理、和以用第二喷出周期tub来喷出油墨的方式而对第二头进行控制的处理。处理电路620a执行如下处理,即,以使喷嘴面fd_1移动所决定的喷
嘴面fd_1的移动量的方式来对独立升降机构235_1进行控制的处理、和以使喷嘴面fd_4移动所决定的喷嘴面fd_4的移动量的方式来对独立升降机构235_4进行控制的处理。
[0172]
根据第二实施方式,能够基于第一对应信息db来决定适当的喷出周期tu,并且能够基于第二对应信息dc而以适当的移动量来控制独立升降机构235。
[0173]
此外,处理电路620a基于工件信息而生成第一对应信息db以及第二对应信息dc。
[0174]
也可以设为,第一对应信息db以及第二对应信息dc在印刷动作之前被生成,并且在印刷动作中,立体物印刷装置100a不执行式(4)的喷出周期tu的运算。因此,根据第二实施方式,与第一实施方式相比,能够缩短印刷动作所花费的期间。
[0175]
3.变形例
[0176]
以上所例示的各个方式也可以进行多种多样的变形。在下文中,对具体的变形方式进行例示。从以下的例示中被任意选出的两个以上的方式可以在相互不矛盾的范围内适当地合并。
[0177]
3-1.第一变形例
[0178]
在第一变形例中,立体物印刷装置100也可以不具有独立升降机构235。即,头310也可以无法在z轴方向上移动。但是,在不具有独立升降机构235时,存在z轴上的头310与面wf之间的距离d1无法被维持在预定范围内的情况,从而导致印刷品质降低的情况。因此,立体物印刷装置100优选为具有独立升降机构235。
[0179]
3-2.第二变形例
[0180]
虽然在上述的各方式中的印刷动作的执行中,通过移动机构200进行驱动而使头310相对于工件w的相对位置发生变化,但是并不限于此。具体而言,也可以设为,在工件支承机构900能够沿着x轴而进行移动的情况下,通过工件支承机构900进行驱动而使工件w在x轴上进行移动,从而使头310相对于工件w的位置发生变化。
[0181]
3-3.第三变形例
[0182]
虽然在上述的各方式中,为了简化说明而记载了工件w的面wf具有倾斜区域r1和平坦区域r2的情况,但是并不限于此。例如,工件w的面wf也可以具有两个倾斜区域。与一方的倾斜区域相比,另一方的倾斜区域相对于x轴的倾斜度更大。此外,工件w的面wf也可以具有倾斜度不同的三个以上的区域。在面wf具有三个以上的区域的情况下,头310以喷出周期tu来喷出油墨,所述喷出周期tu与该头310的喷嘴列l所对置的区域的相对于x轴的倾斜度相应。
[0183]
符号说明
[0184]
100、100a
…
立体物印刷装置;200
…
移动机构;220
…
直动机构;221
…
轨道部件;222
…
滑架;223
…
直动编码器;230
…
升降机构;231
…
支承板;235、235_1至235_4
…
独立升降机构;236、236_1至236_4
…
升降编码器;280
…
支承部;281
…
工作台;300、300_1至300_4
…
液体喷出单元;310、310_1至310_4
…
头;320
…
压力调节阀;330、330_1至330_4
…
传感器;340
…
开关电路;350
…
支承体;400
…
液体供给单元;410
…
液体贮存部;420
…
供给流道;421
…
上游流道;422
…
下游流道;422a
…
流道部件;500、500a
…
控制模块;510
…
定时信号生成电路;520
…
电源电路;530、530a
…
控制电路;540、540_1至540_4
…
驱动信号生成电路;560
…
存储电路;600、600a
…
控制器;610、610a
…
存储电路;620、620a
…
处理电路;700
…
计算机;900
…
工件支承机构;910
…
换行轴机构;920
…
旋转轴机构;922
…
设置面;ax
…
长轴;
clk
…
时钟信号;cng、cng_1、cng_4
…
转换信号;cnt
…
脉冲数;com、com_1至com_4
…
驱动信号;d1
…
距离;d2_1至d2_4、d3
…
信号;da
…
路径信息;db
…
第一对应信息;dc
…
第二对应信息;dr、dx、dy、dz、dz_1至dz_4
…
输出信号;fd、fd_1至fd_4
…
喷嘴面;img
…
印刷数据;l1
…
第一喷嘴列;l2
…
第二喷嘴列;lat、lat_1至lat_4
…
锁存信号;n
…
喷嘴;pd
…
驱动脉冲;pe1
…
第一期间;pe2
…
第二期间;pts
…
定时信号;px、py
…
波形;pc、pl
…
脉冲;r1
…
倾斜区域;r2
…
平坦区域;ra、rb
…
轨道;si、si_1至si_4
…
控制信号;sd、sd_1至sd_4
…
独立指定信号;sr、sx、sy、sz_1至sz_4
…
控制信号;tbu1、tbu2、tbu3、tbu4
…
控制期间;tu、tu_1至tu_4
…
喷出周期;tua
…
第一喷出周期;tub
…
第二喷出周期;vbs
…
偏移电位;vhv
…
电源电位;vhx、vhy
…
最高电位;vlx、vly
…
最低电位;w
…
工件;wf
…
面;xr
…
旋转轴;dcom、dcom_1、dcom_k
…
波形指定信号;δm1、δm4、δmz1
…
移动量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1