智能网联汽车激光雷达实训教学系统的制作方法
1.本实用新型涉及激光雷达教学设备技术领域,具体为智能网联汽车激光雷达实训教学系统。
背景技术:
2.激光雷达被称作智能网联汽车的眼睛,是一种主动式的光学遥感技术,是激光技术与雷达技术相结合的产物。是以发射激光束(对人畜无害的红外光束lightpluses,多为950nm波段附近的红外光)探测目标的位置、速度等特征量的雷达系统。由发射机、天线、接收机、跟踪架及信息处理等部分组成。激光雷达的工作原理是以激光作为信号源,由激光器发射出的脉冲激光,打到地面的树木、道路、桥梁和建筑物上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离,脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用点云数据进行成像处理后,就可得到精确的三维立体图像。
3.所以需要一种激光雷达实训教学系统,培养学生对激光雷达系统的认识,直观了解激光雷达系统的组成,各零部件的功能和作用,满足实训考核教学需要,使实验教学与操作训练有机的结合,加强学生的实践动手能力。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足,提供智能网联汽车激光雷达实训教学系统。
5.本实用新型的目的是通过以下技术方案来实现的:
6.智能网联汽车激光雷达实训教学系统,包括操作台、激光雷达、激光雷达可调支架、工控机、控制台、场景模型,所述工控机与所述控制台均设置在所述操作台上,所述控制台与所述工控机连接,所述场景模型设置在所述激光雷达可调支架的四周,所述激光雷达设置在所述激光雷达可调支架顶端,所述激光雷达与所述工控机连接。
7.优选的,所述工控机包括通信模块、数据处理模块、显示模块、存储模块、故障检测模块,所述控制台包括控制模块,所述激光雷达与所述通信模块连接,所述通信模块、数据处理模块、显示模块、存储模块、故障检测模块分别与所述控制模块连接。
8.优选的,所述激光雷达可调支架为升降支架。
9.优选的,所述激光雷达可调支架包括支架底座、固定管、基座、轴承座、旋转套、伸缩杆、滑块、雷达座,所述的固定管固接在支架底座上,固定管内部设置有通孔,所述的基座固接在固定管的顶端,所述的轴承座外圈固接在基座上端面,轴承座位于固定管的正上方,所述的旋转套固接在轴承座的内圈上,所述的伸缩杆外侧开有螺纹,伸缩杆伸入固定管的内部,且伸缩杆通过螺纹与旋转套连接,所述滑块固接在伸缩杆末端,且滑块滑动连接在固定管的通孔侧壁,所述的雷达座固接在伸缩杆的顶端。
10.优选的,所述的固定管长度与伸缩杆长度相同。
11.本实用新型的有益效果是:
12.1、采用场景模型实现激光雷达的原理实训,通用性强,成本低廉,安全性高。
13.2、可以实现大规模布设设备,实现教学实训需求
14.3、通过转动旋转套,带动螺纹转动,通过螺纹的传动,可带动伸缩杆上下移动,从而改变雷达座的高度,从而实现激光雷达的升降,可以调整激光雷达相对于场景的相对位置。
附图说明
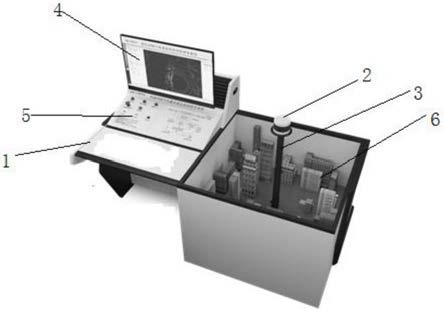
15.图1为本实用新型的整体结构示意图;
16.图2为本实用新型的工控机与操作台的连接示意图;
17.图3为本实用新型的激光雷达可调支架的结构示意图。
18.图中,1、操作台;2、激光雷达;21、支架底座;22、固定管;23、基座;24、轴承座;25、旋转套;26、伸缩杆;27、滑块;28、雷达座;3、激光雷达可调支架;4、工控机;5、控制台;6、场景模型。
具体实施方式
19.下面结合附图进一步详细描述本实用新型的技术方案,但本实用新型的保护范围不局限于以下所述。
20.如图1所示,智能网联汽车激光雷达实训教学系统,包括操作台1、激光雷达2、激光雷达可调支架3、工控机4、控制台5、场景模型6,所述工控机4与所述控制台5均设置在所述操作台1上,所述控制台5与所述工控机4连接,所述场景模型6设置在所述激光雷达可调支架3的四周,所述激光雷达2设置在所述激光雷达可调支架3顶端,所述激光雷达2与所述工控机4连接。
21.如图2所示,所述工控机4包括通信模块、数据处理模块、显示模块、存储模块、故障检测模块,所述控制台5包括控制模块,所述激光雷达2与所述通信模块连接,所述通信模块、数据处理模块、显示模块、存储模块、故障检测模块分别与所述控制模块连接。
22.激光雷达2通过通信模块与控制模块进行数据传输,控制模块将接受到的数据在数据处理模块中处理,处理后的数据通过显示模块显示并存储于存储模块中,方便随时调用回放,故障检测模块用于检测系统实时的工作状态。
23.如图3所示,所述激光雷达可调支架3为升降支架,所述激光雷达可调支架3包括支架底座21、固定管22、基座23、轴承座24、旋转套25、伸缩杆26、滑块27、雷达座28,所述的固定管22固接在支架底座21上,固定管22内部设置有通孔,所述的基座23固接在固定管22的顶端,所述的轴承座24外圈固接在基座23上端面,轴承座24位于固定管22的正上方,所述的旋转套25固接在轴承座24的内圈上,所述的伸缩杆26外侧开有螺纹,伸缩杆26伸入固定管22的内部,且伸缩杆26通过螺纹与旋转套25连接,所述滑块27固接在伸缩杆26末端,且滑块27滑动连接在固定管22的通孔侧壁,所述的雷达座28固接在伸缩杆26的顶端。
24.可以理解的是,所述的固定管22长度与伸缩杆26长度相同。
25.工作人员通过转动旋转套25,带动螺纹转动,通过螺纹的传动,可带动伸缩杆26上下移动,从而改变雷达座28的高度,从而实现激光雷达2的升降,可以调整激光雷达2相对于
场景的相对位置。
26.以上所述仅是本实用新型的优选实施方式,应当理解所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。本实用新型并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本实用新型的精神和范围,则都应在本实用新型所附权利要求的保护范围内。
技术特征:
1.智能网联汽车激光雷达实训教学系统,其特征在于,包括操作台(1)、激光雷达(2)、激光雷达可调支架(3)、工控机(4)、控制台(5)、场景模型(6),所述工控机(4)与所述控制台(5)均设置在所述操作台(1)上,所述控制台(5)与所述工控机(4)连接,所述场景模型(6)设置在所述激光雷达可调支架(3)的四周,所述激光雷达(2)设置在所述激光雷达可调支架(3)顶端,所述激光雷达(2)与所述工控机(4)连接。2.根据权利要求1所述的智能网联汽车激光雷达实训教学系统,其特征在于,所述工控机(4)包括通信模块、数据处理模块、显示模块、存储模块、故障检测模块,所述控制台(5)包括控制模块,所述激光雷达(2)与所述通信模块连接,所述通信模块、数据处理模块、显示模块、存储模块、故障检测模块分别与所述控制模块连接。3.根据权利要求1所述的智能网联汽车激光雷达实训教学系统,其特征在于,所述激光雷达可调支架(3)为升降支架。4.根据权利要求3所述的智能网联汽车激光雷达实训教学系统,其特征在于,所述激光雷达可调支架包括支架底座(21)、固定管(22)、基座(23)、轴承座(24)、旋转套(25)、伸缩杆(26)、滑块(27)、雷达座(28),所述的固定管(22)固接在支架底座(21)上,固定管(22)内部设置有通孔,所述的基座(23)固接在固定管(22)的顶端,所述的轴承座(24)外圈固接在基座(23)上端面,轴承座(24)位于固定管(22)的正上方,所述的旋转套(25)固接在轴承座(24)的内圈上,所述的伸缩杆(26)外侧开有螺纹,伸缩杆(26)伸入固定管(22)的内部,且伸缩杆(26)通过螺纹与旋转套(25)连接,所述滑块(27)固接在伸缩杆(26)末端,且滑块(27)滑动连接在固定管(22)的通孔侧壁,所述的雷达座(28)固接在伸缩杆(26)的顶端。5.根据权利要求4所述的智能网联汽车激光雷达实训教学系统,其特征在于,所述的固定管(22)长度与伸缩杆(26)长度相同。
技术总结
本实用新型公开了智能网联汽车激光雷达实训教学系统,涉及激光雷达教学设备技术领域,包括操作台、激光雷达、激光雷达可调支架、工控机、控制台、场景模型,所述工控机与所述控制台均设置在所述操作台上,所述控制台与所述工控机连接,所述场景模型设置在所述激光雷达可调支架的四周,所述激光雷达设置在所述激光雷达可调支架顶端,所述激光雷达与所述工控机连接,采用场景模型实现激光雷达的原理实训,通用性强,成本低廉,安全性高,可以实现大规模布设设备,实现教学实训需求。实现教学实训需求。实现教学实训需求。
技术研发人员:陈飞 佟风 张锋 杨兴山
受保护的技术使用者:北京艾恩科技有限公司
技术研发日:2021.03.05
技术公布日:2021/10/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1