一种焊接机器人模拟教学系统的制作方法
本发明涉及虚拟教学领域,尤其涉及一种焊接机器人模拟教学系统。
背景技术:
1、各种类型的工业机器人已经被广泛应用于焊接等领域,为达到良好的焊接质量,需要对操作人员进行系统培训,目前,对于操作人员的教学培训需要在工业机器人上进行实际操作,但这种方式需要购买大量工业机器人,且需要采用真实材料实施操作,使得成本过高,无法做到人手一台工业机器人,同时,在工业机器人上进行实际操作时,由于操作人员尚处于操作不熟练的阶段,因此容易发生安全事故,且容易造成机器人损坏,因此导致焊接操作人员的培训效果不佳。
技术实现思路
1、为解决上述技术问题,本发明提出了一种焊接机器人模拟教学系统,其采用真实工业机器人示教器和真实焊接机器人,结合实体3d工业机器人虚拟仿真模型,实现人机实时交互,实现沉浸式实践教学的目的,极大提高教学、实训效果。
2、为实现上述目的,本发明提供了以下技术方案:
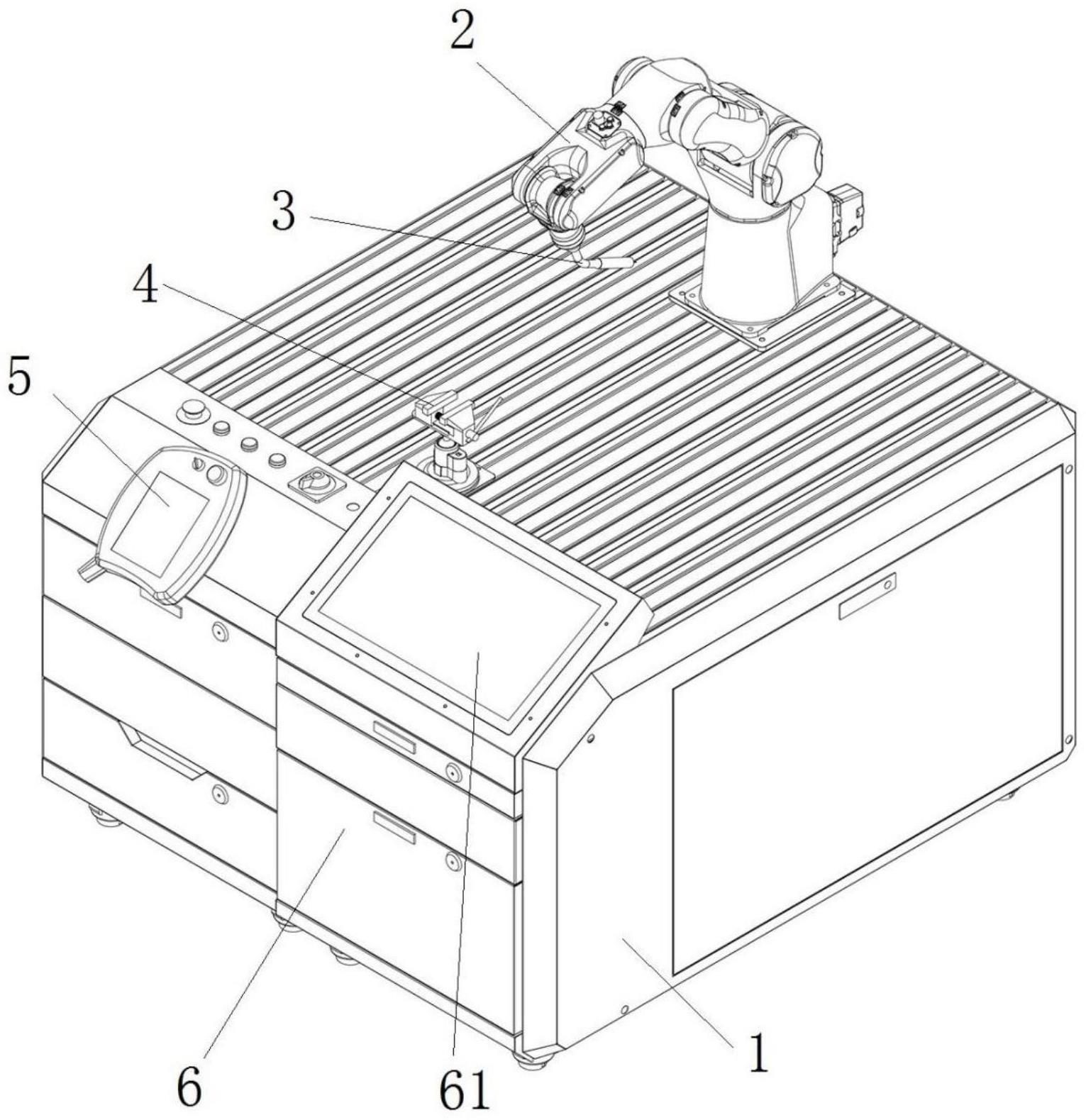
3、本发明提供了一种焊接机器人模拟教学系统,其包括:
4、柜体;
5、焊接机器人,其安装在所述柜体上;
6、焊枪,其连接所述焊接机器人;
7、夹具,其连接所述柜体,用于固定待焊接对象;
8、示教器,其安装在所述柜体上,且连接所述焊接机器人,用于供人员设置机器人模拟焊接参数,使得所述焊接机器人按照所述机器人模拟焊接参数,在所述待焊接对象上完成虚拟焊接动作,以此完成针对待焊接对象的模拟焊接操作;
9、以及处理终端,其用于在所述焊接机器人进行虚拟焊接时显示虚拟的焊接过程。
10、本发明将工业机器人、虚拟仿真、机器智能、数字孪生技术进行综合,建立将传统的工业机器人教学与先进虚拟仿真融合的仿真教学实训体系。其具体采用真实工业机器人示教器和真实焊接机器人,结合实体3d工业机器人虚拟仿真模型,实现人机实时交互,以达到真实示教、真实编译、仿真焊接、虚实结合的沉浸式工业机器人实训教学效果,极大提高教学、实训效果。
技术特征:
1.一种焊接机器人模拟教学系统,其特征在于,包括:
2.如权利要求1所述的焊接机器人模拟教学系统,其特征在于,所述处理终端包括:
3.如权利要求2所述的焊接机器人模拟教学系统,其特征在于,所述焊接过程展示模块包括:
4.如权利要求2所述的焊接机器人模拟教学系统,其特征在于,所述焊接过程展示模块包括:
5.如权利要求2所述的焊接机器人模拟教学系统,其特征在于,所述焊接过程展示模块包括:
6.如权利要求2所述的焊接机器人模拟教学系统,其特征在于,所述焊接过程展示模块包括:
7.如权利要求2所述的焊接机器人模拟教学系统,其特征在于,所述焊接过程展示模块包括:
8.如权利要求1所述的焊接机器人模拟教学系统,其特征在于,所述处理终端包括:碰撞提示模块,其用于当焊枪与待焊接对象接触和/或焊枪的焊丝端部与待焊接对象触碰时产生提示信息。
9.如权利要求1所述的焊接机器人模拟教学系统,其特征在于,所述处理终端包括:结果评价模块,其连接所述显示器,用于在焊接机器人完成模拟焊接后,对人员的模拟焊接过程进行评价,并在所述显示器上显示评价结果。
10.如权利要求9所述的焊接机器人模拟教学系统,其特征在于,所述结果评价模块包括:
11.如权利要求1所述的焊接机器人模拟教学系统,其特征在于,所述处理终端包括:
12.如权利要求1所述的焊接机器人模拟教学系统,其特征在于,所述处理终端包括:
13.如权利要求1所述的焊接机器人模拟教学系统,其特征在于,所述处理终端包括:
14.如权利要求1所述的焊接机器人模拟教学系统,其特征在于,所述处理终端包括:
15.如权利要求1所述的焊接机器人模拟教学系统,其特征在于,所述焊接机器人模拟教学系统还包括:小程序模块,其可以内置在智能移动终端中;
16.如权利要求1所述的焊接机器人模拟教学系统,其特征在于,所述焊接机器人模拟教学系统还包括:
17.如权利要求1所述的焊接机器人模拟教学系统,其特征在于,所述焊接机器人模拟教学系统还包括:耗材统计模块,其用于根据所述焊接机器人模拟教学系统的焊材实际消耗使用信息获取使用所述焊接机器人模拟教学系统后的耗材变化值。
技术总结
本发明公开了一种焊接机器人模拟教学系统,其包括:柜体;焊接机器人,其安装在所述柜体上;焊枪,其连接所述焊接机器人;夹具,其连接所述柜体,用于固定待焊接对象;示教器,其安装在所述柜体上,且连接所述焊接机器人,用于供人员设置机器人模拟焊接参数,使得所述焊接机器人按照所述机器人模拟焊接参数,在所述待焊接对象上完成虚拟焊接动作,以此完成针对待焊接对象的模拟焊接操作;以及处理终端,其用于在所述焊接机器人进行虚拟焊接时显示虚拟的焊接过程。其采用真实工业机器人示教器和真实焊接机器人,结合实体3D工业机器人虚拟仿真模型,实现人机实时交互,实现沉浸式实践教学的目的,极大提高教学、实训效果。
技术研发人员:林钦,刘河峰,孙淑侠,邓元兵,戴建树,邓火生,王向龙,孟成
受保护的技术使用者:武汉湾流科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!