一种驾驶模拟器AI行人的方法及系统与流程
本发明涉及驾驶模拟,具体地说,涉及一种驾驶模拟器ai行人的方法及系统。
背景技术:
1、驾驶模拟器座舱由驾驶舱座,视景计算机,视屏(19寸显示器),操作传感器,数据采集卡,耳机和话筒等组成。座舱包含了与真实车辆相同的操作部件,"五大"操纵机构:方向盘、离合器,脚刹,油门和手刹。真车变速器:倒档、一档、二档、三档、四档、五档和空挡(自动档只含前进档、倒车档和驻车档)。真车操作开关:左转向灯、右转向灯、应急灯、喇叭、点火开关、总电开关、安全带、车门、雨刷、远光灯、近光灯、远近光交替。座舱既可以进行联网训练,也可以进行单机训练;
2、然而目前的驾驶模拟器场景单一,导致与实际驾驶有出入,造成驾驶人得不到很好的练习额,特别是模拟驾驶至靠近人行道时,在人行道蹲守交通法则和避让行人都是实际驾驶最重要的过程,若驾驶人在空旷的ai场景下进行练习,导致真实性差,对驾驶感的培养有限,鉴于此,我们提出一种驾驶模拟器ai行人的方法及系统。
技术实现思路
1、本发明的目的在于提供驾驶模拟器ai行人的方法及系统,以解决上述背景技术中提出的问题。
2、为实现上述技术问题的解决,本发明的目的之一在于,提供驾驶模拟器ai行人的方法,包括以下步骤:
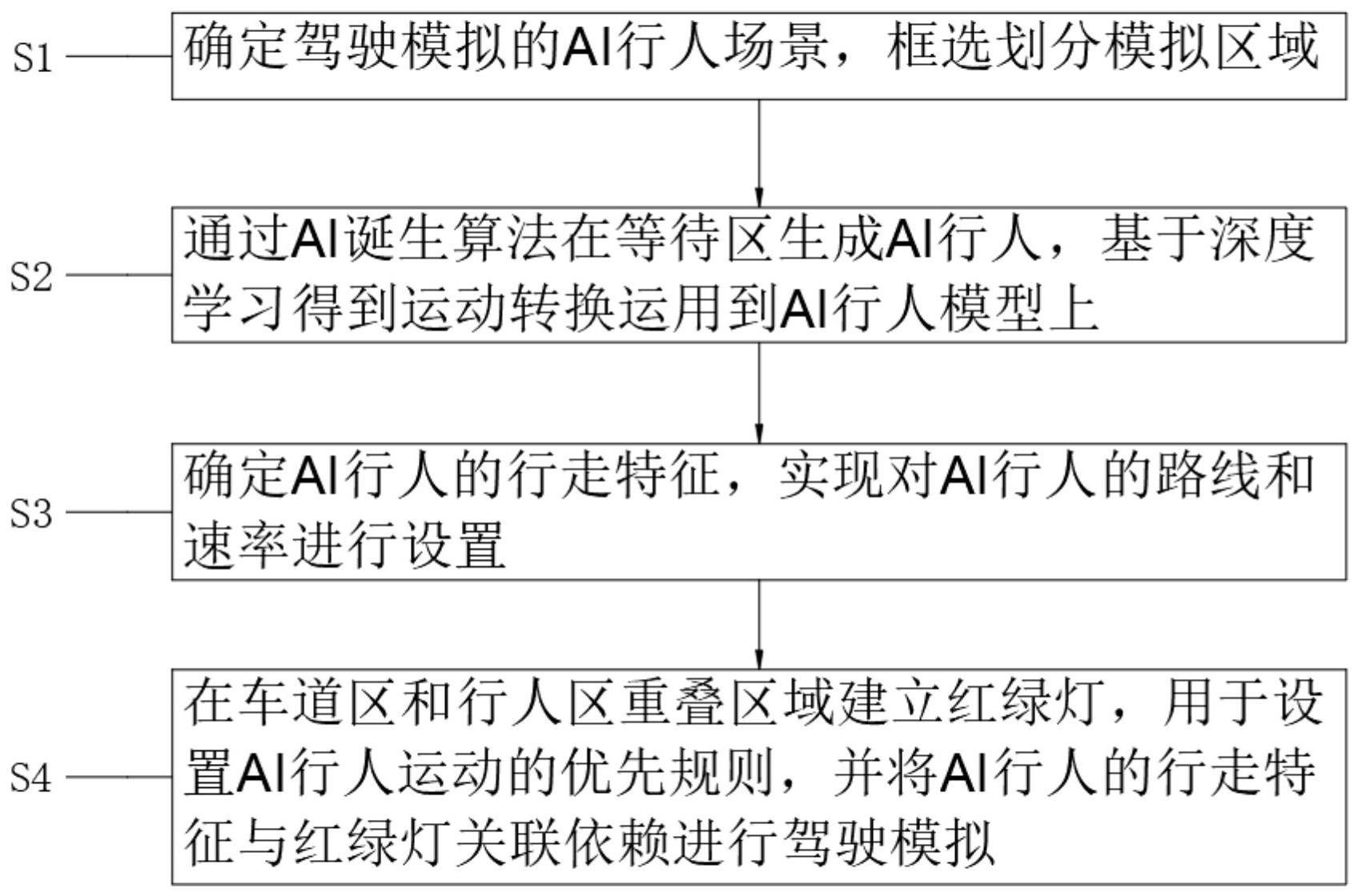
3、s1、确定驾驶模拟的ai行人场景,框选划分模拟区域,模拟区域包括等待区、车道区、行人区和背景区;
4、s2、通过ai诞生算法在等待区生成ai行人,基于深度学习得到运动转换运用到ai行人模型上;
5、s3、确定ai行人的行走特征,实现对ai行人的路线和速率进行设置;
6、s4、在车道区和行人区重叠区域建立红绿灯,用于设置ai行人运动的优先规则,并将ai行人的行走特征与红绿灯关联依赖进行驾驶模拟。
7、通过用户在驾驶模拟器进行模拟练习驾驶时,在模拟车辆靠近模拟区域,形成ai行人场景,使ai行人模拟实际的行走特征过马路,同时,ai行人通过红绿灯关联依赖,进一步符合实际情况,用户可以身临其境的练习驾驶在行人区规避碰撞,实现培养驾驶感更准确,也增加了练习的真实性和趣味性。
8、作为本技术方案的进一步改进,所述s1的模拟区域采用3d建模技术,包括以下步骤:
9、输入场景图片,提取模型特征点;
10、搭建三角网格,生成三维网格模型;
11、纹理映射:求得模型顶点在二维纹理空间的纹理坐标,是一个从三维空间点到二维平面点的映射过程;
12、提供实现3d模型的编辑功能的接口,对3d模型进行调整后展现出模拟区域的3d模型。
13、作为本技术方案的进一步改进,所述s2中的ai诞生算法包括以下步骤:
14、在3d建模技术的基础上生成ai行人模型;
15、基于视觉捕获的人体运动传递到ai行人模型上,使ai行人模拟真实行人走路。
16、作为本技术方案的进一步改进,所述s3的行走特征包括行走区域、行走路线、行走速率、行走间隔和行走逻辑,其中:
17、行走区域用于确定ai行人沿着行人区行走;
18、行走路线用于根据人行道宽度划定可行走路线数量;
19、行走速率用于根据不同年龄、性别设置行走速率和奔跑速率;
20、行走间隔用于通过间隔随机算法设置每两个ai行人之间的间隔;
21、行为逻辑用于通过障碍物避让算法调整。
22、作为本技术方案的进一步改进,所述间隔随机算法包括以下步骤:
23、预设间隔因子输入,使两个相同年龄、性别的ai行人之间间距保持相同,同理,若两个不同年龄、性别的ai行人行走速率和奔跑速率不同,在间隔因子不变的情况下,使两个ai行人之间的间隔不同,实现间隔随机性。
24、作为本技术方案的进一步改进,所述障碍物避让算法包括以下步骤:
25、编写函数isintriangle()用于判定点与三角形的位置关系。
26、以ai行人m为例,用不规则图形代表障碍物(行驶车辆),障碍物可用一系列的点表示,封装到point类中;
27、ai行人m可用一系列三角形表示,封装到triangle类中,物体碰撞检测简化为判断点在三角形内外的问题;
28、设ai行人m的坐标为m(x,y),若ai行人m的isintriangle()返回值为真,则发生碰撞,重置m的坐标为m=m(x+1,y+1);若返回值为假,未发生碰撞。
29、作为本技术方案的进一步改进,红绿灯采用仿真红绿灯设备,包括红灯、绿灯和黄灯,用于在一定时间内切换红灯和绿灯亮起,黄灯用于在红灯和绿灯切换的临界值时亮起。
30、作为本技术方案的进一步改进,所述s4中在进行驾驶模拟时,以红绿灯作为优先规则,包括以下事件:
31、事件一、ai行人到达行人区端部,红绿灯显示绿灯,控制ai行人沿着路线走到行人区另一端;
32、事件二、ai行人到达行人区端部,红绿灯显示黄灯和绿灯,控制ai行人停止在等待区。
33、本发明的目的之二在于,提供了用于实现驾驶模拟器ai行人的系统,包括上述所述的驾驶模拟器ai行人的方法,包括模拟区域划分模块、ai行人模型生成模块、行走特征设置模块和红绿灯关联模块;
34、所述模拟区域划分模块用于确定驾驶模拟的ai行人场景,框选划分模拟区域;
35、所述ai行人模型生成模块用于通过ai诞生算法在等待区生成ai行人,基于深度学习得到运动转换运用到ai行人模型上;
36、所述行走特征设置模块用于确定ai行人的行走特征,实现对ai行人的路线和速率进行设置,有利于符合实际不同人产生不同的运动效果,提高驾驶模拟器的真实性;
37、所述红绿灯关联模块用于在车道区和行人区重叠区域建立红绿灯,用于设置ai行人运动的优先规则,并将ai行人的行走特征与红绿灯关联依赖进行驾驶模拟。
38、与现有技术相比,本发明的有益效果:通过用户在驾驶模拟器进行模拟练习驾驶时,在模拟车辆靠近模拟区域,形成ai行人场景,使ai行人模拟实际的行走特征过马路,同时,ai行人通过红绿灯关联依赖,进一步符合实际情况,用户可以身临其境的练习驾驶在行人区规避碰撞,实现培养驾驶感更准确,也增加了练习的真实性和趣味性。
技术特征:
1.一种驾驶模拟器ai行人的方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的驾驶模拟器ai行人的方法,其特征在于:所述s1的模拟区域采用3d建模技术,包括以下步骤:
3.根据权利要求2所述的驾驶模拟器ai行人的方法,其特征在于:所述s2中的ai诞生算法包括以下步骤:
4.根据权利要求3所述的驾驶模拟器ai行人的方法,其特征在于:所述s3的行走特征包括行走区域、行走路线、行走速率、行走间隔和行走逻辑,其中:
5.根据权利要求4所述的驾驶模拟器ai行人的方法,其特征在于:所述间隔随机算法包括以下步骤:
6.根据权利要求4所述的驾驶模拟器ai行人的方法,其特征在于:所述障碍物避让算法包括以下步骤:
7.根据权利要求1所述的驾驶模拟器ai行人的方法,其特征在于:红绿灯采用仿真红绿灯设备,包括红灯、绿灯和黄灯,用于在一定时间内切换红灯和绿灯亮起,黄灯用于在红灯和绿灯切换的临界值时亮起。
8.根据权利要求7所述的驾驶模拟器ai行人的方法,其特征在于:所述s4中在进行驾驶模拟时,以红绿灯作为优先规则,包括以下事件:
9.用于实现驾驶模拟器ai行人的系统,包括权利要求1-8中任意一项所述的驾驶模拟器ai行人的方法,其特征在于:包括模拟区域划分模块、ai行人模型生成模块、行走特征设置模块和红绿灯关联模块;
技术总结
本发明涉及驾驶模拟技术领域,具体地说,涉及一种驾驶模拟器AI行人的方法及系统。包括以下步骤:确定驾驶模拟的AI行人场景,框选划分模拟区域,通过AI诞生算法在等待区生成AI行人,基于深度学习得到运动转换运用到AI行人模型上,确定AI行人的行走特征,实现对AI行人的路线和速率进行设置,在车道区和行人区重叠区域建立红绿灯,用于设置AI行人运动的优先规则,并将AI行人的行走特征与红绿灯关联依赖进行驾驶模拟。本发明用户可以身临其境的练习驾驶在行人区规避碰撞,实现培养驾驶感更准确,也增加了练习的真实性和趣味性。
技术研发人员:张建林,李斌锋
受保护的技术使用者:武汉未来幻影科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!