一种用于演示仿海马尾部结构的机械臂运动原理的模块化教具
背景技术:
技术实现思路
0、
技术实现要素:
1、(1)设计方案
2、本发明提供了一种用于演示仿海马尾部结构的机械臂运动原理的模块化教具,具体包括机械臂外骨板、机械臂脊柱、弹簧连接件和驱动绳,其中机械臂外骨板、机械臂脊柱通过弹簧连接件相连,可划分成多组呈等比例缩放的节段,由驱动绳串联控制。
3、(2)本发明的优点
4、仿海马尾蛇形臂横截面为矩形,当采用弯曲缠绕的方式抓取物体时接触面较大,抓取稳定性好,使机械臂具有较强的承重能力;同时,仿生机械臂中的外骨板存在被动变形机制,只需要一个驱动即可实现对不规则物体的缠绕抓取,自适应性优良,控制简单。
5、蛇形臂机构因其优良的工作性能而具有广阔的应用前景,教师可通过对此教具辅助学生学习蛇形臂机构的工作原理,提升学生的学习动力、兴趣以及自主动手能力。
技术特征:
1.一种用于演示仿海马尾部结构的机械臂运动原理的模块化教具,其特征在于,所述仿生机械臂可由n段节段组成,n≥5。
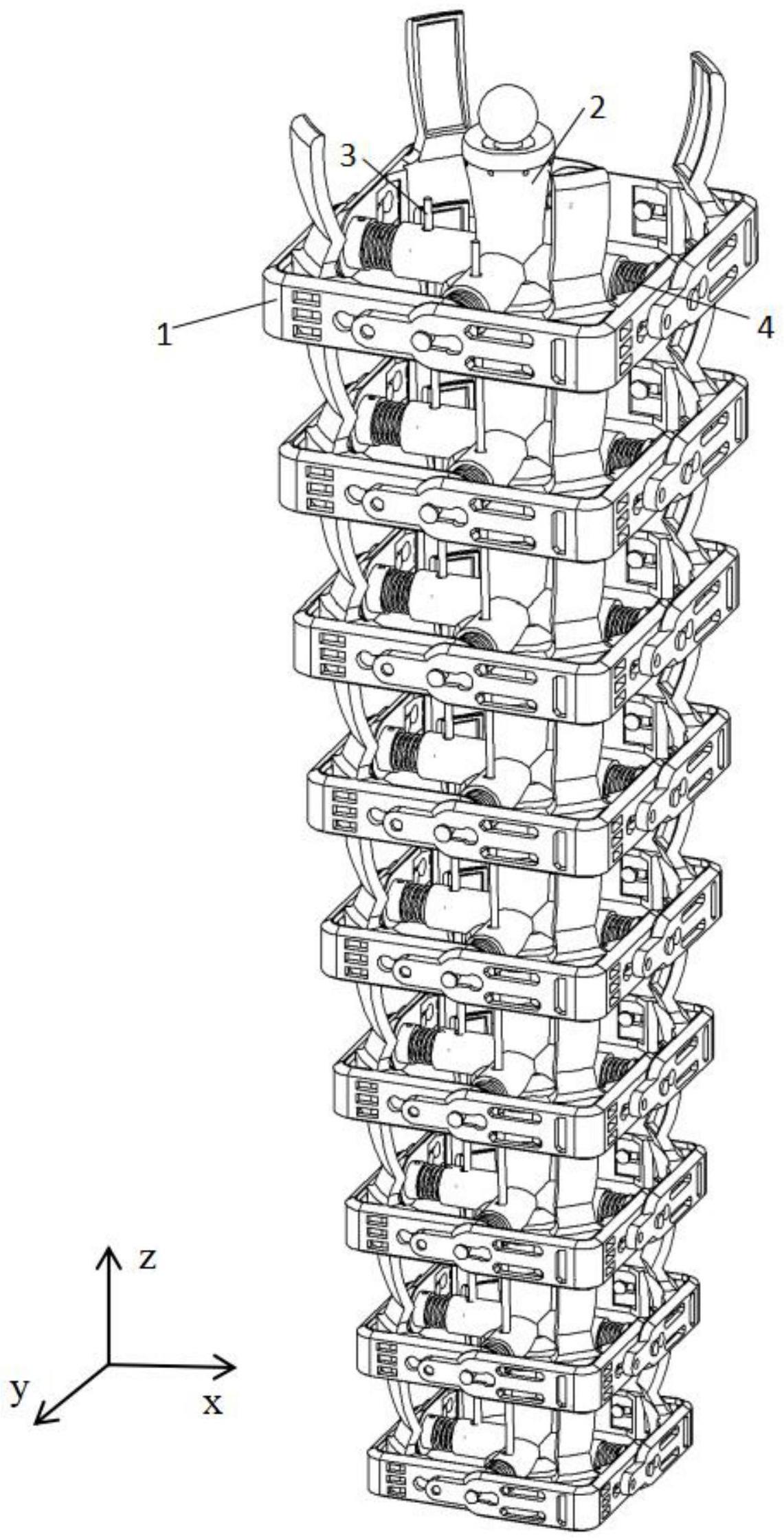
2.根据权利要求1所述的用于演示仿海马尾部结构的机械臂运动原理的模块化教具,其特征包括:在结构方面,其组成模块包括仿生机械臂外骨架(1)、仿生机械臂脊柱(2)、驱动绳(3)、弹簧连接件(4);
3.根据权利要求2所述的用于演示仿海马尾部结构的机械臂运动原理的模块化教具,其特征在于,所述外骨架第1节段(11)、外骨架第2节段(12)、外骨架第3节段(13)、外骨架第4节段(14)、外骨架第5节段(15)、外骨架第6节段(16)、外骨架第7节段(17)、外骨架第8节段(18)和外骨架第9节段(19)结构相同,同时尺寸大小不同,编号相邻的外骨架节段之间呈等比例缩放关系:前一节段比后一节段的缩放比例为μ,μ>1。
4.根据权利要求2所述的用于演示仿海马尾部结构的机械臂运动原理的模块化教具,其特征在于,所述脊柱第1节段(11)、脊柱第2节段(12)、脊柱第3节段(13)、脊柱第4节段(14)、脊柱第5节段(15)、脊柱第6节段(16)、脊柱第7节段(17)、脊柱第8节段(18)、脊柱第9节段(19)结构相同,同时尺寸大小不同,编号相邻的脊柱节段之间呈等比例缩放关系:前一节段比后一节段的缩放比例为μ,μ>1。
5.根据权利要求2所述的用于演示仿海马尾部结构的机械臂运动原理的模块化教具,其特征在于,第11号到第14号l型外骨板(111-114)通过第11号到第14号内滑键(1111-1141)、第11号到第14号外滑槽(1112-1142)、第11号到第14号内滑槽(1114-1144)和第11号到第14号外滑键(1115-1145)形成固连,构成4组移动副。
6.根据权利要求2所述的用于演示仿海马尾部结构的机械臂运动原理的模块化教具,其特征在于,外骨架第1节段(11)到第9节段(19)通过第11号到第91号滑动球面(1116-1916)、第12号到第92号滑动球面(1126-1926)、第13号到第93号滑动球面(1136-1936)和第14号到第94号滑动球面(1146-1946)配合形成滑动关节。
7.根据权利要求6所述的用于演示仿海马尾部结构的机械臂运动原理的模块化教具,其特征在于,滑动关节的最大位移受到第11号到第91号外骨板限位槽(1117-1917)、第12号到第92号外骨板限位槽(1127-1927)、第13号到第93号外骨板限位槽(1137-1937)和第14号到第94号外骨板限位槽(1147-1947)的限制,以防止机械臂过度扭转。
8.根据权利要求2所述的用于演示仿海马尾部结构的机械臂运动原理的模块化教具,其特征在于,脊柱第1节段(21)到第9节段(29)通过第1号到第8号柔性片(212-282)和第2号到第9号脊柱球突(229-299)形成固连,构成球窝结构(球副)。
技术总结
本发明公开了用于演示仿海马尾部结构的机械臂运动原理的模块化教具,主要用来在课堂教学中演示及引导学生动手操作。用于演示仿海马尾部结构的机械臂运动原理的模块化教具具体包括仿生机械臂外骨架、仿生机械臂脊柱、驱动绳和弹簧连接件,其中仿生机械臂外骨架和仿生机械臂脊柱均可由n段节段组成,n≥5,相邻节段之间呈等比例缩放关系。本发明将蛇形臂机构单元化,具有便于拆卸、控制方便、机械臂灵活度高、抓取包络面自适应可变等特点。本发明可改变一套教具中的节段数量,以满足不同的教学要求。
技术研发人员:赵宏哲,李杰凯,劳元皓
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!