一种高精度工业机器人平台的制作方法
本发明涉及机器人教学领域,具体涉及一种高精度工业机器人平台。
背景技术:
1、工业机器人平台用以实现教学与培训功能,同时还可以根据教学内容与要求进行各机器人组件的灵活布局与授课设计,以此为专业技术人员搭建安全高效的环境。但是现有的机器人平台侧重于教学功能的多样化与基础技术的展示,却忽略了教学过程中实验操作的精细化与实验控制的准确性,如工业机器人的加工定位精度问题,由于不影响工业机器人平台的功能性展示而被大多数技术人员所忽视,从而造成技术与实际生产问题脱离,进一步导致后续的加工操作不准确的问题。
2、公开号为cn110853445a的中国专利,提供了一种半虚拟工业机器人平台,此专利中使用仿真软件代替实体的机器人平台,在节省成本的同时同样可以进行机器人控制功能的培训。但是专利中所述的仿真软件是在理想环境下进行的机器人仿真训练,无法更好地模拟机器人过程中产生的相关误差,从而也无法进一步进行机器人加工定位精度的控制操作。
3、因此,针对现有的机器人平台中存在的问题,本发明中提供了一种高精度工业机器人平台。
技术实现思路
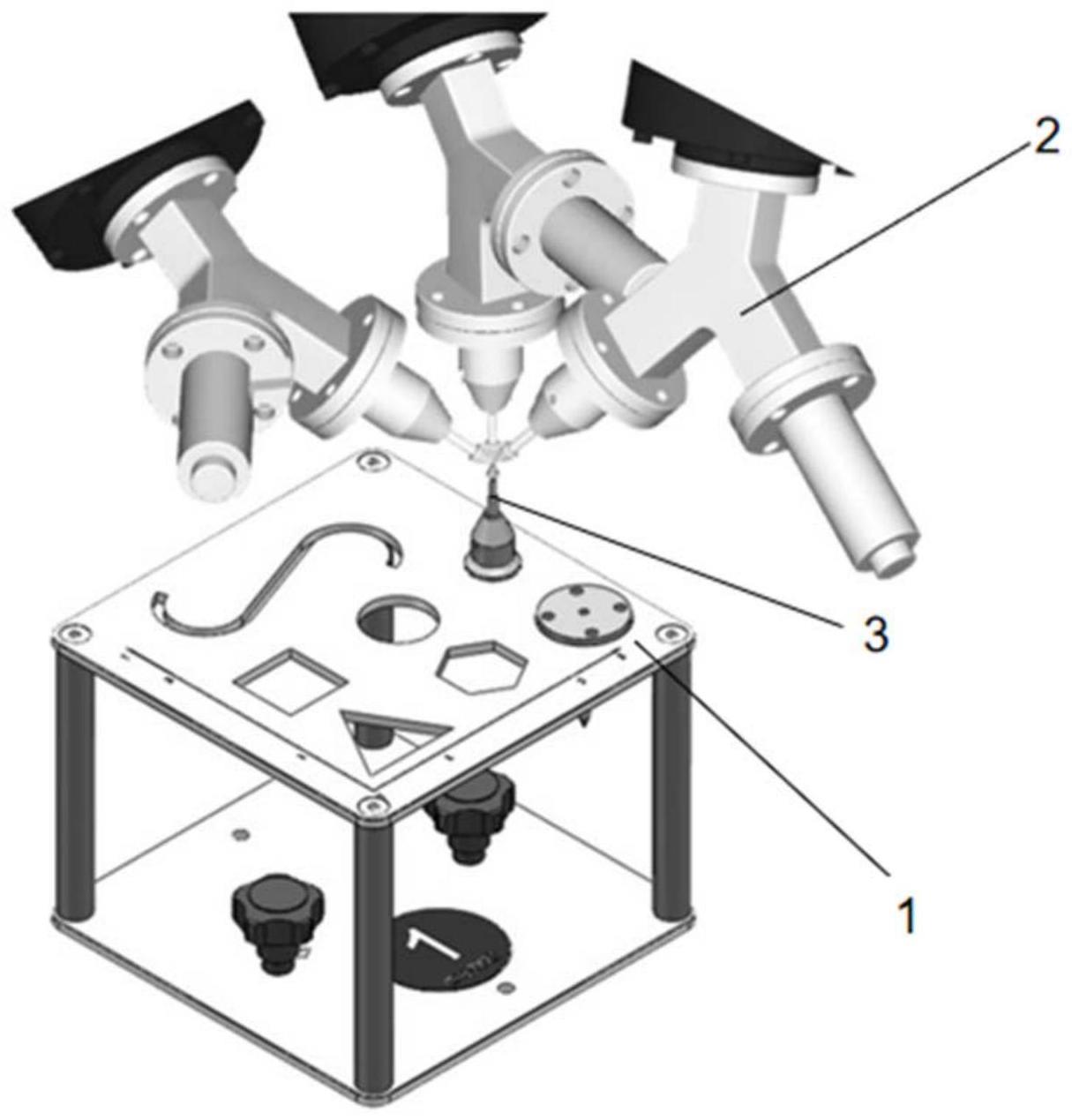
1、针对上述存在的问题,本发明中提供了一种高精度工业机器人平台,具体包括:基础模块,视觉相机识别模块,伺服定位模块与机器人控制模块,其中:
2、所述基础模块,包括转盘面板,所述转盘面板上安装有各功能模块,通过所述功能模块进行技能考核切换;
3、所述视觉相机识别模块,识别并采集物料数据,并将物料数据传送至机器人控制模块与伺服定位模块中进行控制操作;
4、所述伺服定位模块,包括伺服电机,通过所述伺服电机控制转盘面板进行运动状态控制。
5、优选的,所述基础模块中,通过建立工具坐标系与工件坐标系进行机器人标定。通过分别对工具坐标系与工件坐标系进行机器人标定,用以在使用工业机器人平台进行操作前,对工业机器人各坐标的加工定位精度继续进行了标定处理。
6、优选的,所述工具坐标系,采用多点标定与视觉标定相结合的方式进行工具坐标系标定,待工具坐标系标定完成后采用重定位方式对工具坐标系标定准确性进行验证。
7、优选的,所述采用多点标定与视觉标定相结合的方式中,在机器人关节坐标系标定的基础上,进行视觉相机识别模块中传感器坐标系与机器人关节坐标系标定,之后通过视觉相机识别模块中传感器控制机器人末端工具中心自动进行多点标定操作。通过使用标定后的视觉传感器进行多点标定的自动引导,用以进一步提高工具坐标系的标定效率。
8、优选的,所述重定位方式中,控制机器人末端沿指定路径与姿态进行移动,并采集此时机器人末端工具中心位姿坐标,判断所述位姿坐标是否在平均误差范围内,若是则完成工具坐标系标定准确性验证;若否,则重复多点标定与视觉标定相结合的方式进行工具坐标系标定。
9、优选的,所述工件坐标系,在工具坐标系标定的基础上,采用多点法进行工件坐标系的标定,待工件坐标系标定完成后,采用局部非线性计算方法对工件坐标系标定准确性进行验证。
10、优选的,所述工件坐标系为多个,待一个工件坐标系构建完成后,通过对该工件坐标系的位置坐标进行偏移量以获得其余工件坐标系的位置坐标。用以在建立一个工件坐标系后,快速生成其余工件坐标系的位置坐标,减小工业机器人平台的操作与机器人控制模块的计算效率。
11、优选的,所述局部非线性计算方法中,根据工件坐标系中生成的加工路径预估非线性误差,根据所述非线性误差对指定工件坐标系进行补偿,根据该工件坐标系补偿后的位置坐标,对其余工件坐标系的位置坐标进行偏差计算。
12、优选的,所述伺服定位模块,所述运动状态包括:伺服回零控制与伺服旋转控制。所述伺服回零控制中,在伺服电机控制转盘面板进行运动状态控制前,首先进行伺服电机的前置回零控制,用以避免由于伺服定位模块的转向误差造成后续的转盘面板中物料的加工控制误差。
13、优选的,所述伺服旋转控制中,包括恒速运动与变速运动;其中所述恒速运动中,机器人末端工具运动数据与伺服定位模块运动控制数据保持一致,控制机器人末端工具与转盘面板保持相对静止的运动状态。
14、与现有技术相比,本发明的有益效果在于:
15、(1)本发明中提供的高精度工业机器人平台,通过对工具坐标系与工件坐标系进行机器人标定,避免了后续的教工中出现累计加工误差,提高了加工的培训质量与培训真实性。
16、(2)在(1)的基础上,本发明基础模块中,采用多点标定与视觉标定相结合的方式进行工具坐标系标定,使用自动标定的方式代替了传统的工具坐标系示教标定方式,从而进一步提高了工具坐标系的标定效率。
17、(3)在(2)的基础上,本发明通过建立多点标定与视觉标定相结合的方式,用以避免传统的人工多点标定的过程中,手动对机器人末端工具中心位置移动不准确,从而造成多点标定存在误差的问题。
18、(4)在(1)的基础上,本发明中采用局部非线性计算方法对工件坐标系标定准确性进行验证,用以进一步提高工件坐标系在实际过程中,物料加工控制时的加工准确性与加工精度。
19、(5)在(4)的基础上,本发明中通过建立伺服定位模块,用以对转盘面板的运动状态进行动态控制,并建立了机器人末端工具与转盘面板保持相对静止的运动状态,从而进一步实现机器人末端工具边操作转盘面板边转动的持续性操作。
技术特征:
1.一种高精度工业机器人平台,其特征在于,具体包括:基础模块,视觉相机识别模块,伺服定位模块与机器人控制模块,其中:
2.根据权利要求1所述的高精度工业机器人平台,其特征在于,所述基础模块中,通过建立工具坐标系与工件坐标系进行机器人标定。
3.根据权利要求2所述的高精度工业机器人平台,其特征在于,所述工具坐标系,采用多点标定与视觉标定相结合的方式进行工具坐标系标定,待工具坐标系标定完成后采用重定位方式对工具坐标系标定准确性进行验证。
4.根据权利要求3所述的高精度工业机器人平台,其特征在于,所述采用多点标定与视觉标定相结合的方式中,在机器人关节坐标系标定的基础上,进行视觉相机识别模块中传感器坐标系与机器人关节坐标系标定,之后通过视觉相机识别模块中传感器控制机器人末端工具中心自动进行多点标定操作。
5.根据权利要求3所述的高精度工业机器人平台,其特征在于,所述重定位方式中,控制机器人末端沿指定路径与姿态进行移动,并采集此时机器人末端工具中心位姿坐标,判断所述位姿坐标是否在平均误差范围内,若是则完成工具坐标系标定准确性验证;若否,则重复多点标定与视觉标定相结合的方式进行工具坐标系标定。
6.根据权利要求2所述的高精度工业机器人平台,其特征在于,所述工件坐标系,在工具坐标系标定的基础上,采用多点法进行工件坐标系的标定,待工件坐标系标定完成后,采用局部非线性计算方法对工件坐标系标定准确性进行验证。
7.根据权利要求6所述的高精度工业机器人平台,其特征在于,所述工件坐标系为多个,待一个工件坐标系构建完成后,通过对该工件坐标系的位置坐标进行偏移量以获得其余工件坐标系的位置坐标。
8.根据权利要求7所述的高精度工业机器人平台,其特征在于,所述局部非线性计算方法中,根据工件坐标系中生成的加工路径预估非线性误差,根据所述非线性误差对指定工件坐标系进行补偿,根据该工件坐标系补偿后的位置坐标,对其余工件坐标系的位置坐标进行偏差计算。
9.根据权利要求1所述的高精度工业机器人平台,其特征在于,所述伺服定位模块,所述运动状态包括:伺服回零控制与伺服旋转控制。
10.根据权利要求9所述的高精度工业机器人平台,其特征在于,所述伺服旋转控制中,包括恒速运动与变速运动;其中所述恒速运动中,机器人末端工具运动数据与伺服定位模块运动控制数据保持一致,控制机器人末端工具与转盘面板保持相对静止的运动状态。
技术总结
本发明涉及机器人教学领域,具体涉及一种高精度工业机器人平台。本发明具体包括:基础模块,视觉相机识别模块,伺服定位模块与机器人控制模块,其中:所述基础模块,包括转盘面板,所述转盘面板上安装有各功能模块,通过所述功能模块进行技能考核切换;所述视觉相机识别模块,识别并采集物料数据,并将物料数据传送至机器人控制模块与伺服定位模块中进行控制操作;所述伺服定位模块,包括伺服电机,通过所述伺服电机控制转盘面板进行运动状态控制。本发明通过对工具坐标系与工件坐标系进行机器人标定,避免了后续的教工中出现累计加工误差,提高了加工的培训质量与培训真实性。
技术研发人员:王伟
受保护的技术使用者:江苏海渡教育科技集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!