一种工业协作模拟平台、协作模拟方法及介质与流程
本申请涉及工业机器人领域,具体而言,涉及一种工业协作模拟平台、协作模拟方法及介质。
背景技术:
1、传统现有的工业协作机器人、数字孪生技术的实训课程主要是针对某一物体的或某单一技术实训而设计,集成性差,过于理论、不贴合生产应用实际,现有的工作协作模拟平台无法阿金工业协作机器人及数字孪生技术的结合,无法进行多项目实训,即视觉检测实训、模拟码垛涂胶实训、液体分装实训,数字孪生实训,总控plc实训;此外现有的工作协作模拟平台难以根据视觉图像分割技术,视觉手眼标定、数字孪生技术、码垛技术、涂胶技术进行模拟协作,集成性较低,体积较大,难以复合多方面实训项目;无法实现教学目的,针对上述问题,目前亟待有效的技术解决方案。
技术实现思路
1、本申请实施例的目的在于提供一种工业协作模拟平台、协作模拟方法及介质,可以利用数字孪生技术提供模拟平台,有效减少实物操作的安全事故以及设备损耗,模拟现实中协作生产情境,以实训的模式更快的了解工业协作机器人。
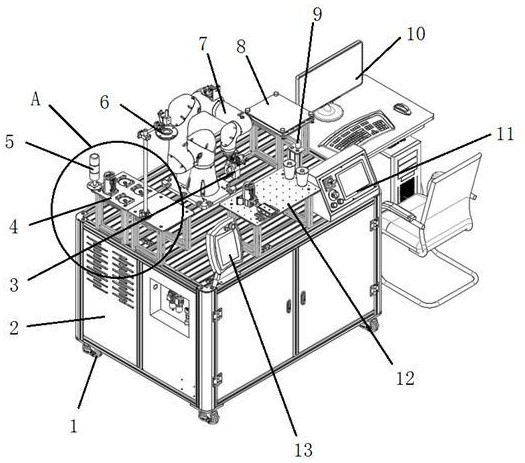
2、本申请实施例还提供了一种工业协作模拟平台,包括:工作台以及设置在工作台一侧的数字孪生操作端;
3、所述工作台顶部一端设置有存储模块,所述存储模块用于存放产品;
4、所述存储模块一侧设置有协作机器人,所述协作机器人一侧设置有涂胶码垛模块,所述存储模块与所述涂胶码垛模块分别位于所述协作机器人的两侧;
5、所述工作台顶部设置有分装模块,所述分装模块设置在所述协作机器人的正前方;
6、所述工作台顶部设置有视觉检测模块,所述视觉检测模块与所述存储模块并列设置,所述视觉检测模块用于检测存储模块内的产品参数信息;
7、所述工作台顶部设置有总控模块,所述总控模块与存储模块、协作机器人、分装模块及涂胶码垛模块电性连接,所述总控模块与所述数字孪生操作端电性连接。
8、可选地,在本申请实施例所述的工业协作模拟平台中,所述存储模块包括固定安装在工作台顶部的存储台,所述存储台顶部一角设置有指示灯,所述存储台顶部阵列设置有多个凹槽,所述产品设置在凹槽内。
9、可选地,在本申请实施例所述的工业协作模拟平台中,所述凹槽内部中心位置设置有存储传感器,所述存储传感器用于检测产品存放状态,所述凹槽两侧对称设置有两个限位块,所述产品设置两个限位块内侧,两个所述限位块相对的一侧设置有凹曲面,所述凹曲面的曲率与所述产品外壁的曲率相同。
10、可选地,在本申请实施例所述的工业协作模拟平台中,所述视觉检测模块包括视觉检测台与视觉支架,所述视觉检测台固定安装在工作台的顶部,所述视觉支架固定安装在视觉检测台的顶部,所述视觉支架一端设置有视觉相机与视觉光源,所述视觉光源位于所述视觉相机的下方。
11、可选地,在本申请实施例所述的工业协作模拟平台中,所述协作机器人包括机械臂与机器人夹爪,所述机械臂为多段结构,所述机器人夹爪为两个,所述机器人夹爪相对移动对产品进行夹持移动,所述协作机器人底部设置有协作台,所述协作台固定安装在工作台的顶部。
12、可选地,在本申请实施例所述的工业协作模拟平台中,所述分装模块一侧设置有示教器,所述示教器用于提供工业协作机器人的示教编程;所述分装模块包括分装台,所述分装台顶部一侧设置有夹紧机构,所述夹紧机构用于夹持固定产品,所述分装台顶部另一侧设置有多个定位机构,所述定位机构用于固定杯子,所述协作机器人能够抓取分装台顶部的产品,并将产品模拟分装在多个杯子里。
13、可选地,在本申请实施例所述的工业协作模拟平台中,所述涂胶码垛模块包括涂胶模块与码垛模块,所述涂胶模块以可拆卸的方式安装在码垛模块的上方,所述涂胶码垛模块一侧设置有标定模块,所述标定模块用于视觉检测模块的位置标定。
14、第二方面,本申请实施例提供了一种协作模拟方法,应用于工业协作模拟平台,包括如下步骤:
15、获取模拟模块上的产品存放状态信息,产品存放状态信息包括产品存放数量与产品存放位置;
16、获取协作机器人的状态信息,根据协作机器人的状态信息与产品存放状态信息进行匹配,生成协作机器人移动抓取信息;
17、根据移动抓取信息控制协作机器人移动至存储模块上方进行产品抓取;
18、根据模拟项目选择对应的模拟工位,生成模拟工位的位置信息,模拟工位包括分装模块与涂胶码垛模块;
19、将模拟工位的位置信息与产品存放位置进行比较,得到产品转移信息,根据产品转移信息控制协作机器人抓取产品并放置在模拟工位上,得到模拟信息;
20、将模拟信息按照预定的方式传输至数字孪生终端。
21、可选地,在本申请实施例所述的协作模拟方法中,获取模拟模块上的产品存放状态信息之前,进行视觉检测模块的位置标定,标定方法如下:
22、通过视觉检测模块获取视觉图像,将视觉图像进行分割,得到若干个子图像;
23、提取若干个子图像特征,并剔除噪声特征,将剔除噪声特征后的子图像进行融合,得到融合图像;
24、通过标定模块对融合图像的图像中心点位置标定,将图像中心点位置与工作台中心点位置进行比较,得到位置偏差率;
25、判断所述位置偏差率是否大于或等于设定的位置偏差率阈值;
26、若大于或等于,则生成修正信息,根据修正信息调整视觉相机的位置;
27、若小于,则判定标定成功。
28、第三方面,本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质中包括协作模拟方法程序,所述协作模拟方法程序被处理器执行时,实现如上述所示的协作模拟方法的步骤。
29、由上可知,本申请实施例提供的一种工业协作模拟平台、协作模拟方法及介质,通过工作台以及设置在工作台一侧的数字孪生操作端;工作台顶部一端设置有存储模块,存储模块用于存放产品;存储模块一侧设置有协作机器人,协作机器人一侧设置有涂胶码垛模块,存储模块与涂胶码垛模块分别位于协作机器人的两侧;工作台顶部设置有分装模块,分装模块设置在协作机器人的正前方;工作台顶部设置有视觉检测模块,视觉检测模块与存储模块并列设置,视觉检测模块用于检测存储模块内的产品参数信息;利用数字孪生技术提供模拟平台,有效减少实物操作的安全事故以及设备损耗,模拟现实中协作生产情境,以实训的模式更快的了解工业协作机器人。
30、本申请的其他特征和优点将在随后的说明书阐述。
技术特征:
1.一种工业协作模拟平台,包括:工作台以及设置在工作台一侧的数字孪生操作端;其特征在于,
2.根据权利要求1所述的工业协作模拟平台,其特征在于,所述存储模块包括固定安装在工作台顶部的存储台,所述存储台顶部一角设置有指示灯,所述存储台顶部阵列设置有多个凹槽,所述产品设置在凹槽内。
3.根据权利要求2所述的工业协作模拟平台,其特征在于,所述凹槽内部中心位置设置有存储传感器,所述存储传感器用于检测产品存放状态,所述凹槽两侧对称设置有两个限位块,所述产品设置两个限位块内侧,两个所述限位块相对的一侧设置有凹曲面,所述凹曲面的曲率与所述产品外壁的曲率相同。
4.根据权利要求3所述的工业协作模拟平台,其特征在于,所述视觉检测模块包括视觉检测台与视觉支架,所述视觉检测台固定安装在工作台的顶部,所述视觉支架固定安装在视觉检测台的顶部,所述视觉支架一端设置有视觉相机与视觉光源,所述视觉光源位于所述视觉相机的下方。
5.根据权利要求4所述的工业协作模拟平台,其特征在于,所述协作机器人包括机械臂与机器人夹爪,所述机械臂为多段结构,所述机器人夹爪为两个,所述机器人夹爪相对移动对产品进行夹持移动,所述协作机器人底部设置有协作台,所述协作台固定安装在工作台的顶部。
6.根据权利要求5所述的工业协作模拟平台,其特征在于,所述分装模块一侧设置有示教器,所述示教器用于提供工业协作机器人的示教编程;所述分装模块包括分装台,所述分装台顶部一侧设置有夹紧机构,所述夹紧机构用于夹持固定产品,所述分装台顶部另一侧设置有多个定位机构,所述定位机构用于固定杯子,所述协作机器人能够抓取分装台顶部的产品,并将产品模拟分装在多个杯子里。
7.根据权利要求6所述的工业协作模拟平台,其特征在于,所述涂胶码垛模块包括涂胶模块与码垛模块,所述涂胶模块以可拆卸的方式安装在码垛模块的上方,所述涂胶码垛模块一侧设置有标定模块,所述标定模块用于视觉检测模块的位置标定。
8.一种协作模拟方法,应用于权利要求1-7中任一权利要求所述的工业协作模拟平台,其特征在于,包括如下步骤:
9.根据权利要求8所述的协作模拟方法,其特征在于,获取模拟模块上的产品存放状态信息之前,进行视觉检测模块的位置标定,标定方法如下:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中包括协作模拟方法程序,所述协作模拟方法程序被处理器执行时,实现如权利要求9所述的协作模拟方法的步骤。
技术总结
本申请实施例提供了一种工业协作模拟平台、协作模拟方法及介质,该工业协作模拟平台包括:工作台以及设置在工作台一侧的数字孪生操作端;工作台顶部一端设置有存储模块,存储模块用于存放产品;存储模块一侧设置有协作机器人,协作机器人一侧设置有涂胶码垛模块,存储模块与涂胶码垛模块分别位于协作机器人的两侧;工作台顶部设置有分装模块,分装模块设置在协作机器人的正前方;工作台顶部设置有视觉检测模块,视觉检测模块与存储模块并列设置,视觉检测模块用于检测存储模块内的产品参数信息;利用数字孪生技术提供模拟平台,有效减少实物操作的安全事故以及设备损耗,模拟现实中协作生产情境,以实训的模式更快的了解工业协作机器人。
技术研发人员:熊清平
受保护的技术使用者:深圳华中数控有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!