一种可组合模拟冲压产线教具的制作方法
本技术涉及展示平台,具体涉及一种可组合模拟冲压产线教具,其用于教学。
背景技术:
1、在实际生产过程中,整个冲压产线由多种设备组成,装置庞大,占地面积大,进行实地参观、教学都不太现实,其所需耗费的时间与成本过高,而且不易组织与协调。
2、因此,为了满足展示与教学的需求,市面上出现了专门用以展示与教学用的模拟冲压产线教具,现有模拟冲压产线教具虽然具有功能明确的优点,但同时存在着如下缺陷:
3、主要地,因功能太过于明确使得其太过于单一,使功能不易改变从而无法实现变化场景的需求,缺乏了拓展性,不利于现在的教学当中的思维拓展和创新;
4、其次地,现有模拟冲压产线教具所采用的组装工件通常是一体化的,在教学的过程中容易出现物料的浪费,缺乏可持续性。
5、由鉴于此,研发出一种模拟冲压产线教具,在实现体积较小、方便拼接、满足教学需求的同时,能够进行多种组合使其功能变化以满足教学中变化场景的需求,是从业人员所迫切期望地。
技术实现思路
1、本实用新型所要解决的技术问题在于提供一种可组合模拟冲压产线教具,其不仅体积小巧、方便拼接,而且每个工序、功能采用模块化,且模块能根据教学需求进行更换与调整,从而能够较容易改变功能,进而满足教学中变化场景的需求。
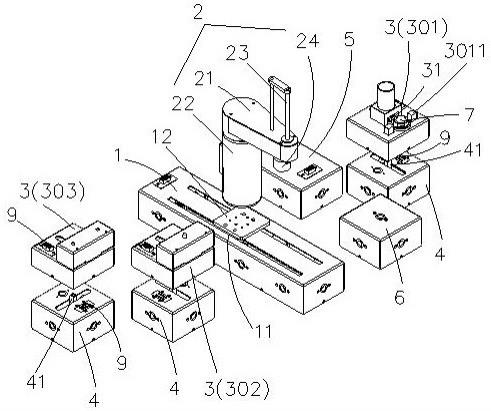
2、本实用新型是通过以下技术方案解决上述技术问题的:一种可组合模拟冲压产线教具,包括直线模块(1)、位于直线模块(1)上方的提升机械臂模块(2)、数量与工序对应的执行模块(3)、与执行模块(3)一一对应且位于执行模块(3)下方的小型直线模块(4)、用于为直线模块(1)提供动力的动力模块(5)、填充模块(6)、置于执行模块(3)上的组装工件(7)、plc模块、及用于模块之间相互拼接固定的快速连接结构(8),所述提升机械臂模块(2)、小型直线模块(4)、动力模块(5)分别与plc模块连接,所述直线模块(1)通过快速连接结构(8)与动力模块(5)连接,所述执行模块(3)通过快速连接结构(8)与小型直线模块(4)连接,且执行模块(3)与小型直线模块(4)之间通过8针磁吸接头(9)实现信号连接,所述小型直线模块(4)通过快速连接结构(8)与直线模块(1)连接;所述直线模块(1)上设有直线滑动的滑块(11),所述提升机械臂模块(2)包括机械臂本体(21)、支撑件(22)、垂直穿设于机械臂本体(21)的伸缩杆(23)和用于抓取组装工件(7)的夹爪(24),所述支撑件(22)与滑块(11)连接,所述机械臂本体(21)水平旋转连接于支撑件(22)上,所述伸缩杆(23)纵向移动连接于机械臂本体(21)上,所述夹爪(24)设于伸缩杆(23)的底端上。
3、进一步地,所述组装工件(7)由上模(71)和下模(72)组成,所述上模(71)上装有母扣(73),所述下模(72)上装有与母扣(73)相匹配的子扣(74),所述上模(71)与下模(72)通过母扣(73)、子扣(74)扣合连接。
4、进一步地,所述机械臂本体(21)上设有均与plc模块连接的上限位磁性传感器(211)和下限位磁性传感器(212)。
5、进一步地,所述夹爪(24)通过调节块(25)设于伸缩杆(23)的底端上,且夹爪(24)水平滑动连接于调节块(25)。
6、进一步地,所述支撑件(22)通过拓展板(12)与滑块(11)连接;所述支撑件(22)内上方设有感应机械臂本体(21)旋转0度的第一光电传感器(221)和感应机械臂本体(21)旋转180度的第二光电传感器(222),且所述第一光电传感器(221)与第二光电传感器(222)分别与plc模块连接。
7、进一步地,所述小型直线模块(4)包括直线移动的推块(41)和电机(42),所述推块(41)与电机(42)连接,所述电机(42)与plc模块连接;所述执行模块(3)设有与推块(41)相匹配的导杆(31),所述导杆(31)与推块(41)连接。
8、进一步地,所述执行模块(3)具体为供料模块(301)、冲压模块(302)和退火模块(303)。
9、进一步地,所述供料模块(301)的物料到位区设有对射传感器(3011)。
10、进一步地,所述快速连接结构(8)包括圆柱磁铁(81)及相对设置的两个磁吸板(82),所述磁吸板(82)通过螺钉固定于模块上,相邻模块之间通过圆柱磁铁(81)与磁吸板(82)配合固定。
11、进一步地,所述磁吸板(82)朝向圆柱磁铁(81)的一端设置有与圆柱磁铁(81)相匹配的销孔,磁吸板(82)上还设置有固定孔(83),所述直线模块(1)、小型直线模块(4)、动力模块(5)、填充模块(6)上均设有与固定孔(83)相匹配的定位孔(10),所述螺钉穿过固定孔(83)及定位孔(10)将磁吸板(82)与模块固定。
12、本实用新型一种可组合模拟冲压产线教具的有益效果在于:
13、1.将每个工序、功能采用模块化,不仅整体结构小巧紧凑、方便拼接,而且模块能根据教学需求进行更换与调整,从而能够较容易改变功能,进而满足教学中变化场景的需求;此外,提升机械臂模块(2)的具体设置,使得提升机械臂模块(2)能够实现纵向上的提升移动与水平上的旋转,促使组装工件(7)能在不同模块间进行流转,确保各工序按需求进行相应教学展示;
14、2.组装工件(7)的具体设置,能够降低物料的浪费,实现组装工件(7)可持续性利用;
15、3.快速连接结构(8)的具体设置,能够使立体仓库模型各模块之间更便于安装与拆卸。
技术特征:
1.一种可组合模拟冲压产线教具,其特征在于:包括直线模块(1)、位于直线模块(1)上方的提升机械臂模块(2)、数量与工序对应的执行模块(3)、与执行模块(3)一一对应且位于执行模块(3)下方的小型直线模块(4)、用于为直线模块(1)提供动力的动力模块(5)、填充模块(6)、置于执行模块(3)上的组装工件(7)、plc模块、及用于模块之间相互拼接固定的快速连接结构(8),所述提升机械臂模块(2)、小型直线模块(4)、动力模块(5)分别与plc模块连接,所述直线模块(1)通过快速连接结构(8)与动力模块(5)连接,所述执行模块(3)通过快速连接结构(8)与小型直线模块(4)连接,且执行模块(3)与小型直线模块(4)之间通过8针磁吸接头(9)实现信号连接,所述小型直线模块(4)通过快速连接结构(8)与直线模块(1)连接;所述直线模块(1)上设有直线滑动的滑块(11),所述提升机械臂模块(2)包括机械臂本体(21)、支撑件(22)、垂直穿设于机械臂本体(21)的伸缩杆(23)和用于抓取组装工件(7)的夹爪(24),所述支撑件(22)与滑块(11)连接,所述机械臂本体(21)水平旋转连接于支撑件(22)上,所述伸缩杆(23)纵向移动连接于机械臂本体(21)上,所述夹爪(24)设于伸缩杆(23)的底端上。
2.如权利要求1所述的一种可组合模拟冲压产线教具,其特征在于:所述组装工件(7)由上模(71)和下模(72)组成,所述上模(71)上装有母扣(73),所述下模(72)上装有与母扣(73)相匹配的子扣(74),所述上模(71)与下模(72)通过母扣(73)、子扣(74)扣合连接。
3.如权利要求1所述的一种可组合模拟冲压产线教具,其特征在于:所述机械臂本体(21)上设有均与plc模块连接的上限位磁性传感器(211)和下限位磁性传感器(212)。
4.如权利要求1所述的一种可组合模拟冲压产线教具,其特征在于:所述夹爪(24)通过调节块(25)设于伸缩杆(23)的底端上,且夹爪(24)水平滑动连接于调节块(25)。
5.如权利要求1所述的一种可组合模拟冲压产线教具,其特征在于:所述支撑件(22)通过拓展板(12)与滑块(11)连接;所述支撑件(22)内上方设有感应机械臂本体(21)旋转0度的第一光电传感器(221)和感应机械臂本体(21)旋转180度的第二光电传感器(222),且所述第一光电传感器(221)与第二光电传感器(222)分别与plc模块连接。
6.如权利要求1所述的一种可组合模拟冲压产线教具,其特征在于:所述小型直线模块(4)包括直线移动的推块(41)和电机(42),所述推块(41)与电机(42)连接,所述电机(42)与plc模块连接;所述执行模块(3)设有与推块(41)相匹配的导杆(31),所述导杆(31)与推块(41)连接。
7.如权利要求1所述的一种可组合模拟冲压产线教具,其特征在于:所述执行模块(3)具体为供料模块(301)、冲压模块(302)和退火模块(303)。
8.如权利要求7所述的一种可组合模拟冲压产线教具,其特征在于:所述供料模块(301)的物料到位区设有对射传感器(3011)。
9.如权利要求1所述的一种可组合模拟冲压产线教具,其特征在于:所述快速连接结构(8)包括圆柱磁铁(81)及相对设置的两个磁吸板(82),所述磁吸板(82)通过螺钉固定于模块上,相邻模块之间通过圆柱磁铁(81)与磁吸板(82)配合固定。
10.如权利要求9所述的一种可组合模拟冲压产线教具,其特征在于:所述磁吸板(82)朝向圆柱磁铁(81)的一端设置有与圆柱磁铁(81)相匹配的销孔,磁吸板(82)上还设置有固定孔(83),所述直线模块(1)、小型直线模块(4)、动力模块(5)、填充模块(6)上均设有与固定孔(83)相匹配的定位孔(10),所述螺钉穿过固定孔(83)及定位孔(10)将磁吸板(82)与模块固定。
技术总结
本技术涉及一种可组合模拟冲压产线教具,包括直线模块、提升机械臂模块、执行模块、小型直线模块、动力模块、填充模块、组装工件、PLC模块、及用于模块之间相互拼接固定的快速连接结构;直线模块上设有直线滑动的滑块,提升机械臂模块包括机械臂本体、支撑件、垂直穿设于机械臂本体的伸缩杆和用于抓取组装工件的夹爪,支撑件与滑块连接,机械臂本体水平旋转连接于支撑件上,伸缩杆纵向移动连接于机械臂本体上,所述夹爪设于伸缩杆的底端上。本技术的优点在于:不仅体积小巧、方便拼接,而且每个工序、功能采用模块化,且模块能根据教学需求进行更换与调整,从而能够较容易改变功能,进而满足教学中变化场景的需求。
技术研发人员:孙启龙
受保护的技术使用者:福建黑龙机器人科技有限公司
技术研发日:20230228
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!