地铁车门自动化控制实验平台的制作方法
本技术涉及自动化控制实验,尤其涉及地铁车门自动化控制实验平台。
背景技术:
1、地铁车门的开合是通过自动化控制系统进行操控,在研究地铁车门自动化控制时,通常会使用到实验平台进行实验操作,现有实验平台多为数据展示,如动画演示等,实操可视化的实现平台较为落后。
2、因此,现在研发了一种能够进行可视化的车门仿真实验平台,直观了解电客车车门自动化运动方式和控制逻辑,并具备实操功能使用方便的地铁车门自动化控制实验平台。
技术实现思路
1、为了克服现有实验平台多为数据展示,如动画演示等,实操可视化的实现平台较为落后的缺点,本实用新型提供一种能够进行可视化的车门仿真实验平台,直观了解电客车车门自动化运动方式和控制逻辑,并具备实操功能使用方便的地铁车门自动化控制实验平台。
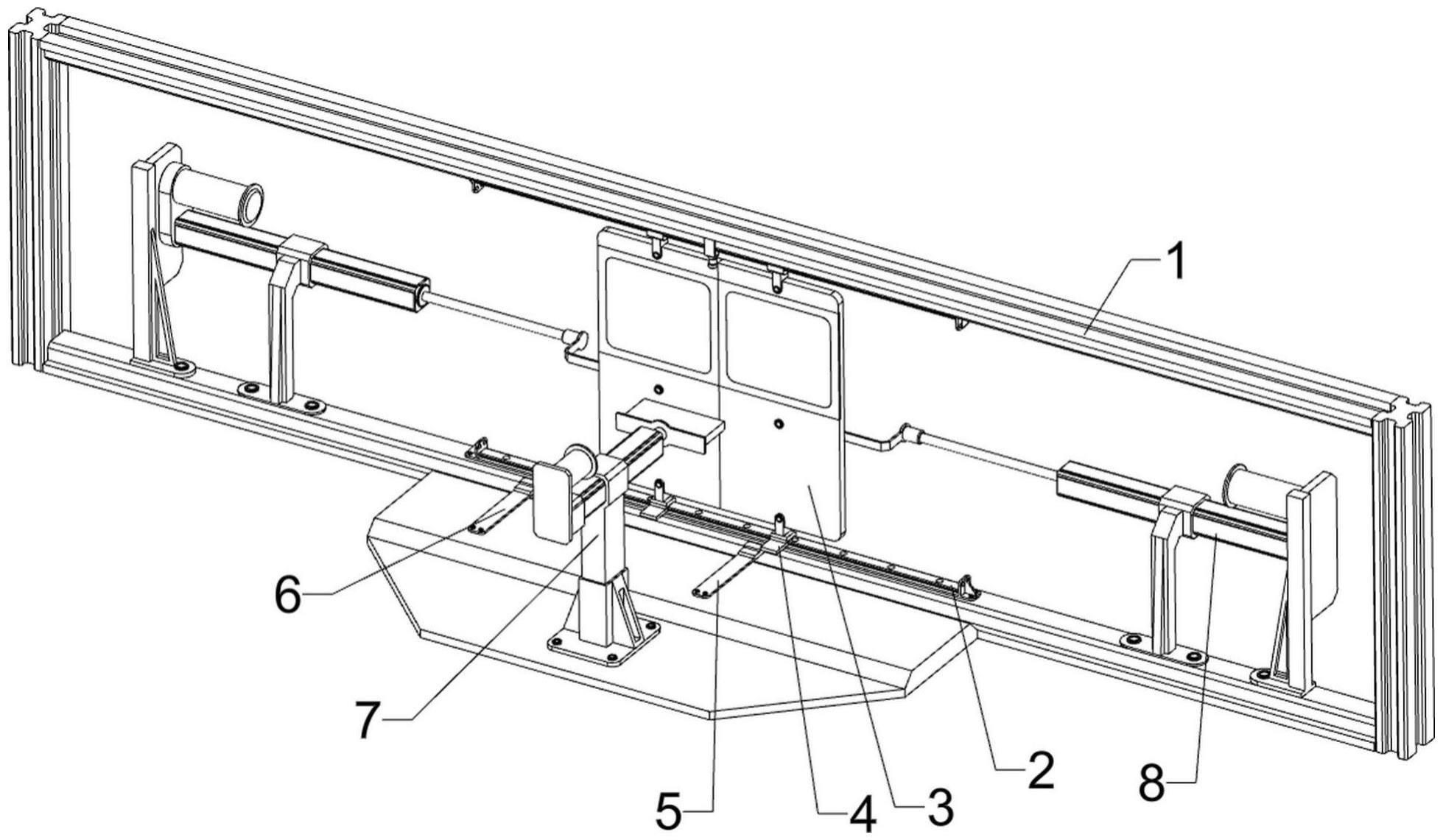
2、技术方案如下:地铁车门自动化控制实验平台,包括有底座、线性导轨、模拟门板、锁到位无缘磁铁感应开关、关到位无缘磁铁感应开关、开到位无缘磁铁感应开关和模拟进入机构,底座中部上下两侧均连接有线性导轨,线性导轨左右两部之间均滑动式连接有模拟门板,模拟门板底部均连接有锁到位无缘磁铁感应开关,锁到位无缘磁铁感应开关均与相邻的线性导轨滑动式连接,底座左部上侧连接有开到位无缘磁铁感应开关,底座右部上侧连接有关到位无缘磁铁感应开关,开到位无缘磁铁感应开关和关到位无缘磁铁感应开关均与锁到位无缘磁铁感应开关电性连接,底座上设有用于模型人员进出经过模拟门板的模拟进入机构。
3、作为优选,模拟进入机构包括有第一电动推杆、模拟块和激光开关,底座前部上侧连接有第一电动推杆,第一电动推杆伸缩端上连接有模拟块,底座中部上侧连接有激光开关,模拟门板开合时,第一电动推杆推动模拟块穿入模拟门板之间,通过激光开关进行感应,触发进出警报,模拟人员在模拟门板开合时的进出情况。
4、作为优选,还包括有自动开关机构,自动开关机构包括有第二电动推杆和连接架,底座有两部均连接有第二电动推杆,锁到位无缘磁铁感应开关、关到位无缘磁铁感应开关和开到位无缘磁铁感应开关均与第二电动推杆电性连接,第二电动推杆伸缩端上均连接有连接架,连接架均与相邻的模拟门板连接,第二电动推杆与激光开关电性连接,通过第二电动推杆伸缩端控制模拟门板的开合,当模拟门板开合时,激光开关接收到模拟块的穿入情况,自动控制停止第二电动推杆的运行,暂停对模拟门板的开合控制。
5、作为优选,底座左右两侧开有安装槽。
6、作为优选,模拟门板上均设有模拟窗。
7、作为优选,连接架为l型结构。
8、与现有技术相比,本实用新型具有如下优点:1、本实用新型通过第二电动推杆控制模拟门板的开闭,模拟地铁车门自动化控制情况,能够进行可视化的车门仿真实验平台,直观了解电客车车门自动化运动方式和控制逻辑,并具备实操功能使用方便。
9、2、本实用新型通过第一电动推杆推动模拟块穿入模拟门板之间,再通过激光开关进行感应,触发进出警报控制第二电动推杆的操作,能够达到模拟人员在模拟门板开合时的进出情况,提高实验模拟的多样性的效果。
技术特征:
1.地铁车门自动化控制实验平台,其特征在于,包括有底座(1)、线性导轨(2)、模拟门板(3)、锁到位无缘磁铁感应开关(4)、关到位无缘磁铁感应开关(5)、开到位无缘磁铁感应开关(6)和模拟进入机构(7),底座(1)中部上下两侧均连接有线性导轨(2),线性导轨(2)左右两部之间均滑动式连接有模拟门板(3),模拟门板(3)底部均连接有锁到位无缘磁铁感应开关(4),锁到位无缘磁铁感应开关(4)均与相邻的线性导轨(2)滑动式连接,底座(1)左部上侧连接有开到位无缘磁铁感应开关(6),底座(1)右部上侧连接有关到位无缘磁铁感应开关(5),开到位无缘磁铁感应开关(6)和关到位无缘磁铁感应开关(5)均与锁到位无缘磁铁感应开关(4)电性连接,底座(1)上设有用于模型人员进出经过模拟门板(3)的模拟进入机构(7)。
2.根据权利要求1所述的地铁车门自动化控制实验平台,其特征在于,模拟进入机构(7)包括有第一电动推杆(71)、模拟块(72)和激光开关(73),底座(1)前部上侧连接有第一电动推杆(71),第一电动推杆(71)伸缩端上连接有模拟块(72),底座(1)中部上侧连接有激光开关(73),模拟门板(3)开合时,第一电动推杆(71)推动模拟块(72)穿入模拟门板(3)之间,通过激光开关(73)进行感应,触发进出警报,模拟人员在模拟门板(3)开合时的进出情况。
3.根据权利要求2所述的地铁车门自动化控制实验平台,其特征在于,还包括有自动开关机构(8),自动开关机构(8)包括有第二电动推杆(81)和连接架(82),底座(1)有两部均连接有第二电动推杆(81),锁到位无缘磁铁感应开关(4)、关到位无缘磁铁感应开关(5)和开到位无缘磁铁感应开关(6)均与第二电动推杆(81)电性连接,第二电动推杆(81)伸缩端上均连接有连接架(82),连接架(82)均与相邻的模拟门板(3)连接,第二电动推杆(81)与激光开关(73)电性连接,通过第二电动推杆(81)伸缩端控制模拟门板(3)的开合,当模拟门板(3)开合时,激光开关(73)接收到模拟块(72)的穿入情况,自动控制停止第二电动推杆(81)的运行,暂停对模拟门板(3)的开合控制。
4.根据权利要求1所述的地铁车门自动化控制实验平台,其特征在于,底座(1)左右两侧开有安装槽。
5.根据权利要求1所述的地铁车门自动化控制实验平台,其特征在于,模拟门板(3)上均设有模拟窗。
6.根据权利要求3所述的地铁车门自动化控制实验平台,其特征在于,连接架(82)为l型结构。
技术总结
本技术涉及自动化控制实验技术领域,尤其涉及地铁车门自动化控制实验平台。本技术提供一种能够进行可视化的车门仿真实验平台,直观了解电客车车门自动化运动方式和控制逻辑,并具备实操功能使用方便的地铁车门自动化控制实验平台。地铁车门自动化控制实验平台,包括有底座和线性导轨等,底座中部上下两侧均连接有线性导轨。本技术通过第二电动推杆控制模拟门板的开闭,模拟地铁车门自动化控制情况,能够进行可视化的车门仿真实验平台,直观了解电客车车门自动化运动方式和控制逻辑,并具备实操功能使用方便。
技术研发人员:生凯,周筱田,尹航,张凌峰,李静,王敏,冯丽君,顾晓晴,徐艺菡
受保护的技术使用者:生凯
技术研发日:20230530
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!