智能机械手教具的制作方法
本技术涉及教学用具领域,特别涉及一种智能机械手教具。
背景技术:
1、教具,也即教学用具,其是使学生能直观、形象地理解教学内容所使用的各类器具及教师授课时使用的用具,教具可提高学生的学习兴趣,丰富感性认识,帮助形成明确的概念,发展学生的观察能力和思维能力。
2、随着人工智能的快速发展,机械手教具作为一种依据人手设计的教学用具,尤为受到众多教育机构以及家长、学生的青睐。然而,目前市面上的机械手教具通常包括底座和设置于底座上的机械手,其中,用于对机械手进行控制的控制器位于底座内,整体结构较为笨重,体积庞大,不便展示及操控示教,难以满足课堂教学的需求;并且,若出现控制故障,需将机械手从底座上拆下,再拆开底座以对其内部的控制器进行维修和调试等操作,维护过程繁琐,不方便。
技术实现思路
1、本实用新型的主要目的是提出一种智能机械手教具,旨在解决背景技术中所指出的机械手教具不便展示及操控且控制器维护过程繁琐、不方便的技术问题。
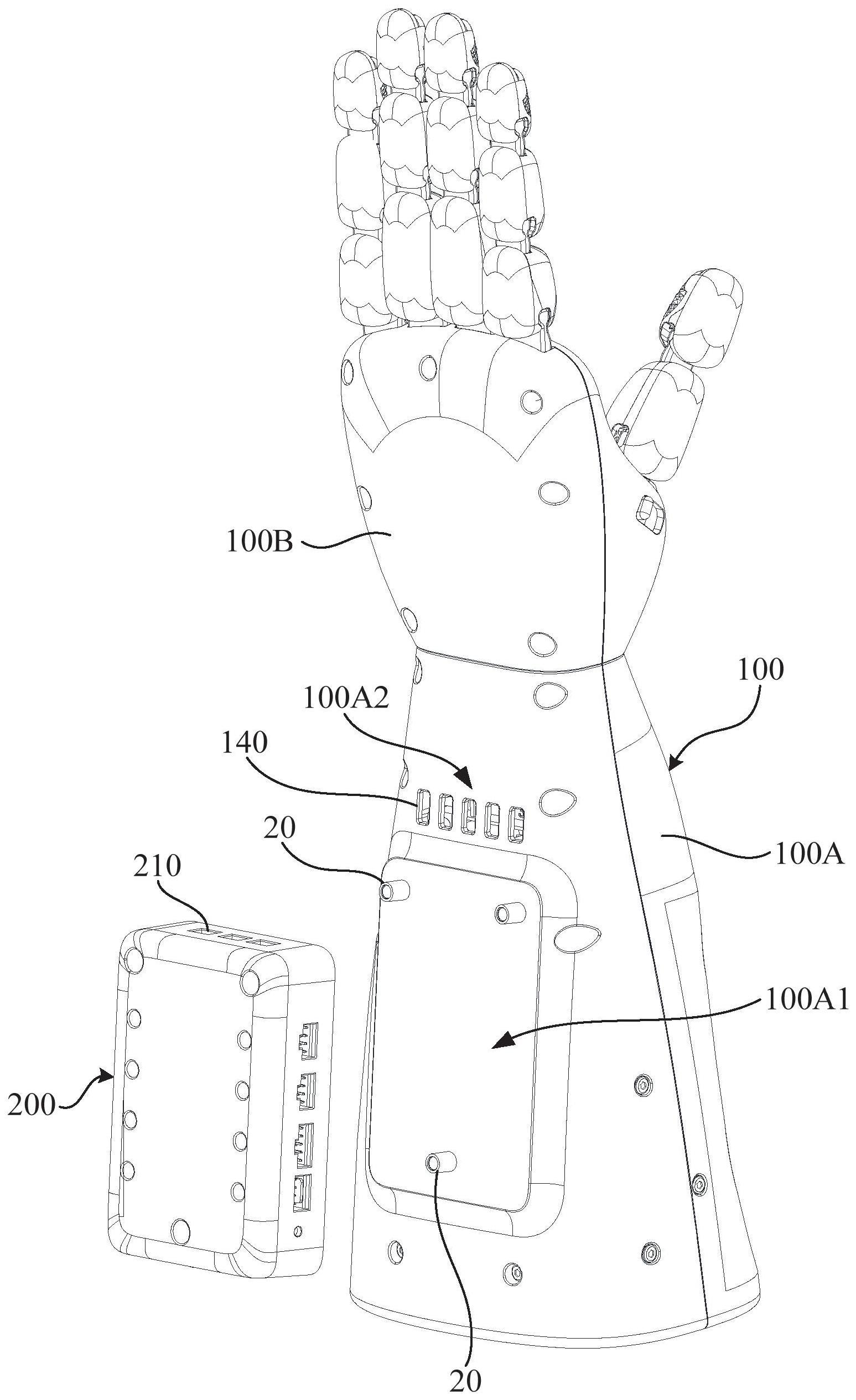
2、为实现上述目的,本实用新型提出一种智能机械手教具,该智能机械手教具包括机械手和电控盒,所述机械手具有臂部和与所述臂部连接的手部,所述臂部上设有与所述电控盒相适配的安装区,所述电控盒可拆卸地设置于所述安装区,所述电控盒与所述机械手电性连接,用于输出手势控制信号以控制所述机械手执行对应的手势动作。
3、在一些实施例中,所述机械手包括:
4、机械手主体,所述机械手主体设有安装腔,所述安装腔位于所述臂部位置处;
5、多根手指,多根所述手指可转动地设置于所述机械手主体上且位于所述手部处;
6、多个驱动组件,多个所述驱动组件设置于所述安装腔内且均与所述电控盒电性连接,每一所述驱动组件通过柔性连接线与一根所述手指连接,每一所述驱动组件通过驱动对应连接所述柔性连接线拉动对应的手指的弯曲程度,以控制多根所述手指组合摆出对应的手势动作。
7、在一些实施例中,多根所述手指包括大拇指,所述大拇指通过转动座安装于所述机械手主体上;
8、所述转动座延伸设置有可带动其转动的拨动部,所述机械手主体的外表面构造有避让孔以供所述拨动部伸出。
9、在一些实施例中,所述臂部上还设有与所述安装区邻近设置的接口区,所述接口区设有多个驱动接口,用于向多个所述驱动组件传输驱动信号;
10、所述电控盒上设有若干信号接口,若干所述信号接口与多个所述驱动接口之间通过信号线连接。
11、在一些实施例中,所述机械手主体还设有空腔,所述空腔位于所述手部位置处,所述空腔与所述安装腔相连通,每一所述柔性连接线从所述空腔穿过以与对应的所述手指连接;
12、其中,所述空腔的腔壁设置有蜂窝状加强筋。
13、在一些实施例中,所述机械手主体还设有容置腔,所述容置腔位于所述臂部位置处且与所述安装腔隔开设置,所述臂部远离所述手部的一端的端面构造有所述容置腔的开口,所述臂部间隔形成有两连通所述容置腔的避让口,所述臂部处于两所述避让口之间的部分构成抓握部。
14、在一些实施例中,所述抓握部朝向与所述开口相邻近的所述避让口中延伸设置有搭放部,所述搭放部的一端形成容置位。
15、在一些实施例中,所述安装区处具有多个定位柱,所述电控盒上对应设有多个定位孔,所述电控盒安装于所述安装区时,多个所述定位柱对应与多个所述定位孔形成插装配合。
16、在一些实施例中,所述定位柱上构造有连接孔,所述电控盒上穿设有紧固件,所述紧固件插装于所述连接孔中以紧固所述电控盒。
17、在一些实施例中,还包括:
18、至少一个传感器组件,可拆卸地设置于所述机械手上并与所述电控盒电性连接,所述传感器组件用于向所述电控盒发送检测信号。
19、本实用新型智能机械手教具通过电控盒向机械手输出手势控制信号,以控制机械手执行对应的手势动作,从而进行示教;其中,电控盒可拆卸地设置于机械手臂部的安装区,以使智能机械手教具整体微缩化,体积小且重量轻,较为轻巧便携,方便用户手持以进行展示及操控示教,从而更加适用于教学,满足课堂教学的需求;并且,若出现控制故障,可直接拆卸电控盒检查维护即可,操作简单且维护方便。
技术特征:
1.一种智能机械手教具,其特征在于,包括机械手和电控盒,所述机械手具有臂部和与所述臂部连接的手部,所述臂部上设有与所述电控盒相适配的安装区,所述电控盒可拆卸地设置于所述安装区,所述电控盒与所述机械手电性连接,用于输出手势控制信号以控制所述机械手执行对应的手势动作。
2.根据权利要求1所述的智能机械手教具,其特征在于,所述机械手包括:
3.根据权利要求2所述的智能机械手教具,其特征在于,多根所述手指包括大拇指,所述大拇指通过转动座安装于所述机械手主体上;
4.根据权利要求2所述的智能机械手教具,其特征在于,所述臂部上还设有与所述安装区邻近设置的接口区,所述接口区设有多个驱动接口,用于向多个所述驱动组件传输驱动信号;
5.根据权利要求2所述的智能机械手教具,其特征在于,所述机械手主体还设有空腔,所述空腔位于所述手部位置处,所述空腔与所述安装腔相连通,每一所述柔性连接线从所述空腔穿过以与对应的所述手指连接;
6.根据权利要求2所述的智能机械手教具,其特征在于,所述机械手主体还设有容置腔,所述容置腔位于所述臂部位置处且与所述安装腔隔开设置,所述臂部远离所述手部的一端的端面构造有所述容置腔的开口,所述臂部间隔形成有两连通所述容置腔的避让口,所述臂部处于两所述避让口之间的部分构成抓握部。
7.根据权利要求6所述的智能机械手教具,其特征在于,所述抓握部朝向与所述开口相邻近的所述避让口中延伸设置有搭放部,所述搭放部的一端形成容置位。
8.根据权利要求1~7任一项所述的智能机械手教具,其特征在于,所述安装区处具有多个定位柱,所述电控盒上对应设有多个定位孔,所述电控盒安装于所述安装区时,多个所述定位柱对应与多个所述定位孔形成插装配合。
9.根据权利要求8所述的智能机械手教具,其特征在于,
10.根据权利要求1所述的智能机械手教具,其特征在于,还包括:
技术总结
本技术公开一种智能机械手教具,该智能机械手教具包括机械手和电控盒,机械手具有臂部和与臂部连接的手部,臂部上设有与电控盒相适配的安装区,电控盒可拆卸地设置于安装区,电控盒与机械手电性连接,用于输出手势控制信号以控制机械手执行对应的手势动作。本技术智能机械手教具通过电控盒向机械手输出手势控制信号,以控制机械手执行对应的手势动作,从而进行示教;其中,电控盒可拆卸地设置于机械手臂部的安装区,以使智能机械手教具整体微缩化,体积小且重量轻,较为轻巧便携,方便用户手持以进行展示及操控示教,从而更加适用于教学,满足课堂教学的需求;并且,若出现控制故障,可直接拆卸电控盒检查维护即可,操作简单且维护方便。
技术研发人员:韩璧丞,李晓,汪文广
受保护的技术使用者:浙江强脑科技有限公司
技术研发日:20230620
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!