一种双机器人协同作业智能制造设备技术应用实训平台的制作方法
本技术涉及教学领域,尤其涉及一种双机器人协同作业智能制造设备技术应用实训平台。
背景技术:
1、机械手配合视觉相机在工业生产中应用广泛,随着自动化的发展,需要更多的自动化专业人才,但是目前缺少相关的实训设备,导致学员的实际操作水平较弱,且目前的教学设备往往是对单个机械手的应用进行教学,而实际生产中,往往是两个或两个以上机械手协同使用完成自动化的工业生产,因此亟需一种能够实现两个机械手协同使用的教学设备。
技术实现思路
1、(一)要解决的技术问题
2、本实用新型提供了一种双机器人协同作业智能制造设备技术应用实训平台,旨在提供一种能够提供两个机械手协同使用,以实现自动生产的教学设备。
3、(二)技术方案
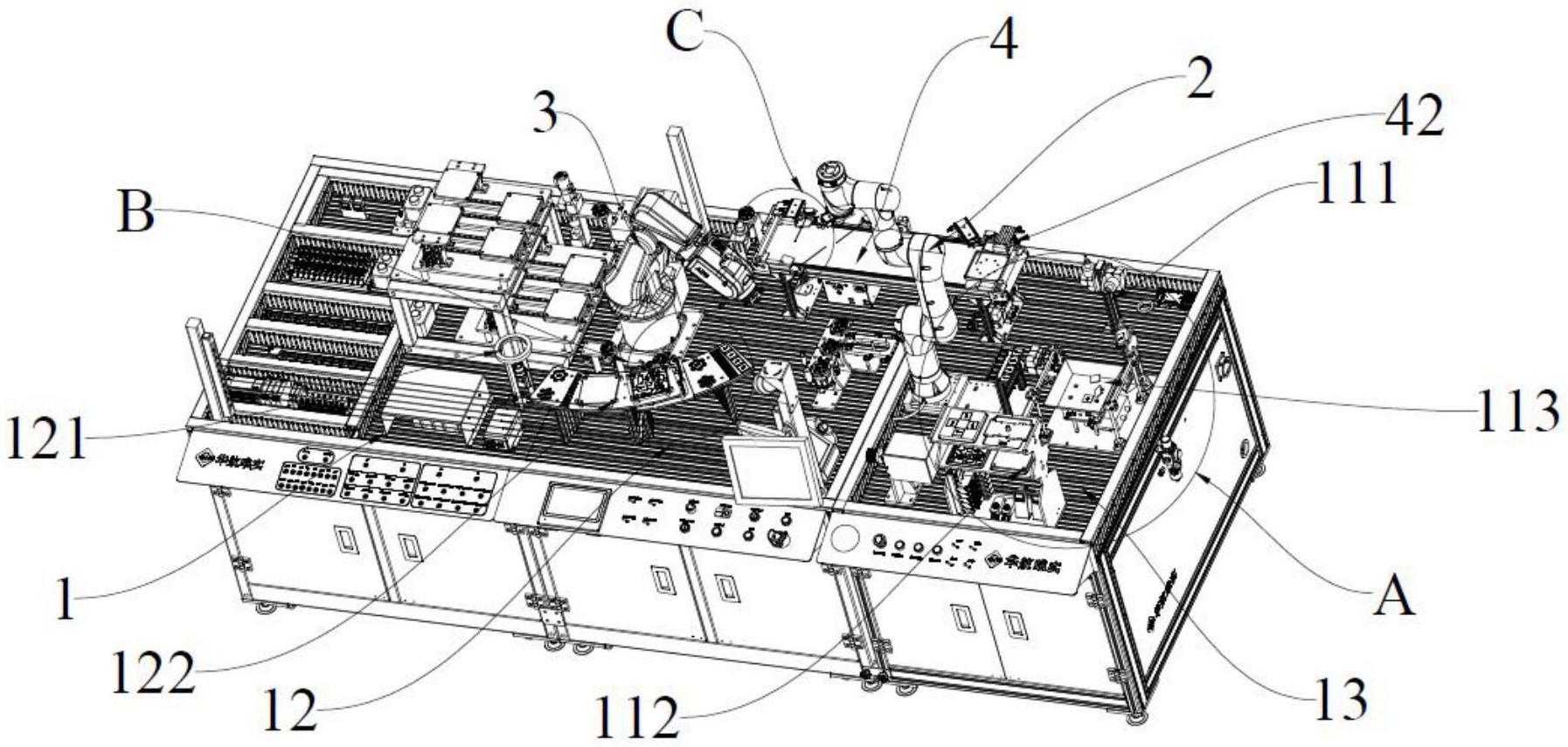
4、为了解决上述问题,本实用新型提供了一种双机器人协同作业智能制造设备技术应用实训平台,所述双机器人协同作业智能制造设备技术应用实训平台包括:工作台、协作机器人、工业机器人以及皮带输送机;
5、所述工作台上的表面分为加工区和所述装配区,所述协作机器人设置在所述加工区,所述工业机器人设置在所述装配区,所述皮带输送机设置在所述工作台上,且所述皮带输送机的一端位于所述加工区,所述皮带输送机的另一端位于所述装配区;
6、所述工作台上的所述加工区上设置有打磨架以及加工仓储架;所述打磨架上转动设置有打磨头;所述加工仓储架上设置有模拟电路板以及芯片托盘,所述芯片托盘上设置有用于放置模拟芯片的凹槽;所述协作机器人的末端设置有视觉相机,所述协作机器人能够对所述加工区内的工件进行转运;
7、所述工作台上的所述装配区上设置有视觉识别单元以及装配仓储架;所述装配仓储架上设置有零件区和成品区;所述零件区内设置有多种零件,所述成品区能够用于叠放所述模拟电路板;所述工业机器人能够对所述装配区内的零件进行转运。
8、优选地,所述加工区上还设置有芯片定位单元;
9、所述芯片定位单元包括振动料盒以及定位架;所述振动料盒的顶部为敞口,所述振动料盒内存储有模拟芯片,其中模拟芯片的形状为矩形,所述定位架的一端倾斜设置有定位板,所述定位板上设置有两个相互连接且垂直的定位条,所述矩形模拟芯片能够在所述定位板的导向作用下与所述定位条贴合。
10、优选地,所述芯片定位单元还包括设置在所述振动料盒上方的条型光源。
11、优选地,所述皮带输送机上转动设置有输送皮带,所述输送皮带能够将所述芯片托盘和所述模拟电路板从所述皮带输送机的一端转运至另一端,所述皮带输送机的两端处均设置有输送定位机构;
12、所述输送定位机构包括成对的定位块和成对的导向块;所述输送皮带的两侧均依次设置有导向块和定位块,所述定位块与所述皮带输送机端部的距离小于所述导向块与所述皮带输送机端部的距离,成对的所述定位块之间设置有定位杆,所述定位杆位于所述输送皮带的上方,所述定位杆能够阻拦所述输送皮带上的芯片托盘和所述模拟电路板。
13、优选地,所述输送定位机构还包括设置在所述皮带输送机上的气缸,所述气缸的活塞上设置有相互垂直的两个抵接条,所述气缸的活塞杆与所述输送皮带的运动方向的夹角不为90度,且所述气缸的活塞杆与朝向所述定位块。
14、优选地,所述导向块上设置有导向面和定位面,所述导向面的第一侧与所述定位面相连;
15、在成对的两个导向块上,两个所述定位面相互平行,且所述定位面与所述输送皮带的运动方向平行;沿所述导向面的第一侧至所述导向面的第二侧,两个所述导向面之间的距离逐渐增大,第一侧和第二侧为导向面上相对的两侧。
16、优选地,所述零件区上设置有零件板,所述零件板上凹陷设置有形状不同的芯片工位、集成电路工位、电容工位以及三极管工位;
17、所述芯片工位用于放置模拟芯片,所述集成电路工位用于放置模拟集成电路板,所述电容工位用于放置模拟电容,所述三极管工位用于放置模拟三极管。
18、优选地,所述成品区上凸出设置有多个定位柱,所述模拟电路板能够放置在多个所述定位柱所围成的空间内。
19、(三)有益效果
20、本实用新型通过在工作台上设置协作机器人和工业机器人,并用皮带输送机来连接加工区和装配区,达到协作机器人和工业机器人的协同使用,并利用协作机器人和工业机器人来协同使用来完成芯片的加工、装配以及电路板的组装和入库,实现了两个机械手协同使用的教学。
技术特征:
1.一种双机器人协同作业智能制造设备技术应用实训平台,其特征在于,所述双机器人协同作业智能制造设备技术应用实训平台包括:工作台、协作机器人、工业机器人以及皮带输送机;
2.如权利要求1所述的双机器人协同作业智能制造设备技术应用实训平台,其特征在于,所述加工区上还设置有芯片定位单元;
3.如权利要求2所述的双机器人协同作业智能制造设备技术应用实训平台,其特征在于,所述芯片定位单元还包括设置在所述振动料盒上方的条型光源。
4.如权利要求1-3中任意一项所述的双机器人协同作业智能制造设备技术应用实训平台,其特征在于,所述皮带输送机上转动设置有输送皮带,所述输送皮带能够将所述芯片托盘和所述模拟电路板从所述皮带输送机的一端转运至另一端,所述皮带输送机的两端处均设置有输送定位机构;
5.如权利要求4所述的双机器人协同作业智能制造设备技术应用实训平台,其特征在于,所述输送定位机构还包括设置在所述皮带输送机上的气缸,所述气缸的活塞上设置有相互垂直的两个抵接条,所述气缸的活塞杆与所述输送皮带的运动方向的夹角不为90度,且所述气缸的活塞杆与朝向所述定位块。
6.如权利要求5所述的双机器人协同作业智能制造设备技术应用实训平台,其特征在于,所述导向块上设置有导向面和定位面,所述导向面的第一侧与所述定位面相连;
7.如权利要求1-3中任意一项所述的双机器人协同作业智能制造设备技术应用实训平台,其特征在于,所述零件区上设置有零件板,所述零件板上凹陷设置有形状不同的芯片工位、集成电路工位、电容工位以及三极管工位;
8.如权利要求1-3中任意一项所述的双机器人协同作业智能制造设备技术应用实训平台,其特征在于,所述成品区上凸出设置有多个定位柱,所述模拟电路板能够放置在多个所述定位柱所围成的空间内。
技术总结
本技术涉及一种双机器人协同作业智能制造设备技术应用实训平台包括:工作台、协作机器人、工业机器人以及皮带输送机。工作台上的表面分为加工区和装配区,协作机器人设置在加工区,工业机器人设置在装配区,皮带输送机的一端位于加工区,皮带输送机的另一端位于装配区。工作台上的加工区上设置有打磨架以及加工仓储架;打磨架上转动设置有打磨头;加工仓储架上设置有模拟电路板以及芯片托盘,芯片托盘上设置有用于放置模拟芯片的凹槽;协作机器人的末端设置有视觉相机。利用协作机器人和工业机器人的协同使用来完成芯片的加工、装配以及电路板的组装和入库,实现了两个机械手协同使用的教学。
技术研发人员:刘浪,张文斌,张辉,汤儒勤,赵杰青,张庆超
受保护的技术使用者:北京华航唯实机器人科技股份有限公司
技术研发日:20230628
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!