多自由度运动模拟平台的制作方法
本技术涉及,具体为多自由度运动模拟平台。
背景技术:
1、多自由度运动模拟平台是一种高级仿真设备,其主要作用是模拟各种复杂的运动场景,如飞行、行车、船舶等。它可以对物体在各个方向上的位移、速度和加速度进行精确的测量和控制,从而实现真实场景的再现,多自由度运动模拟平台的结构包括主体结构、控制系统和运动传动系统三部分。主体结构一般由支撑架、转台、座椅等组成,控制系统则包括计算机控制、运动控制、力反馈控制等模块,运动传动系统则负责传递运动信号和力信号,通常由电机、减速器、传动杆、轮轴等组成,多自由度运动模拟平台可以通过计算机控制系统根据不同的运动需求生成相应的运动信号,然后通过运动传动系统将信号传递到运动平台上,使得平台能够在各个自由度上进行精确的运动;
2、如授权公告号为cn205122074u所公开的一种多自由度空间拓展运动模拟平台,包括六自由度运动平台和安装在其上面的空间拓展平台。所述的六自由度运动平台包括基座,中间承接平台,以及用于连接基座与中间承接平台的六支液压气缸组件。所述的空间拓展平台包括中间承接平台,上运动平台,及连接中间承接平台与上运动平台的四支液压气缸组件等,上述技术方案中主要通过不同角度的多组液压缸、电动缸或者气缸进行驱动,由于缸体机械结构的限制,需要采用大量的液压缸、阀门、传感器、电机等元件,并且需要设计复杂的运动控制算法,这会增加制造和维护的难度,且由于六足伸缩缸臂长的限制,使其在竖直方向很难有较大的运动范围,动作灵活度受限。
技术实现思路
1、本实用新型的目的在于提供多自由度运动模拟平台,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:多自由度运动模拟平台,包括:
3、u字架,u字架由两组立板以及一组横板焊接组成;
4、中柱,所述中柱转动安装在横板顶端的中心位置处,且所述中柱的顶端固定有托盘;
5、立式回转结构,所述立式回转结构安装在立板靠近横板中心点的一侧外壁上,每组立板上设置有两组所述立式回转结构,用于驱动中柱发生自转;
6、旋转驱动单元,所述旋转驱动单元安装在横板底端的一侧,用于带动其中一组立式回转结构工作;
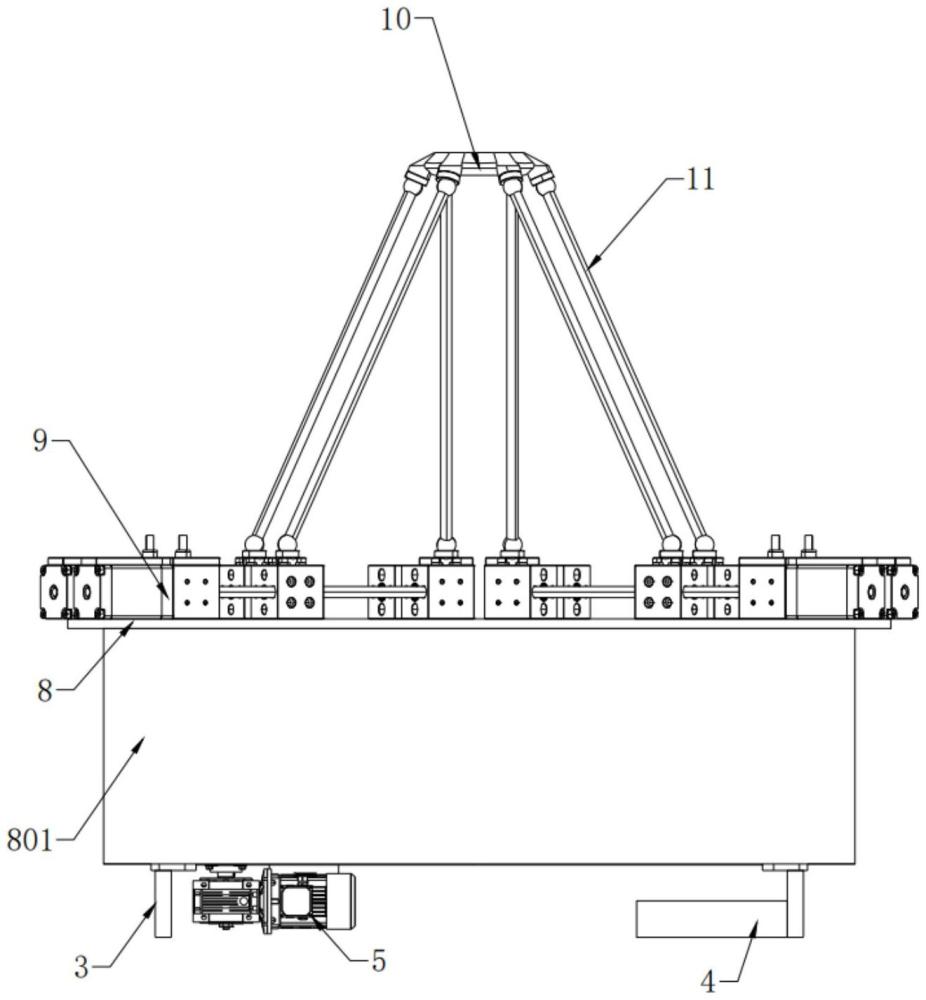
7、所述托盘的顶端安装有六组丝杆直线模组,六组所述丝杆直线模组的螺母副移动端皆铰接安装有连杆,且六组所述连杆的顶端共同铰接安装有平台单体,所述横板的下方设置有电机控制器,所述电机控制器的输出端与丝杆直线模组、旋转驱动单元的输入端电性连接。
8、优选的,所述横板底端的两侧对称安装有支板。
9、优选的,所述立式回转结构包括安装在固定在立板一侧外壁上的轴承座,以及轴承座内部转动安装的主轴,所述主轴表面的一端固定有滚轮,所述滚轮的外周面和中柱的外周面向抵接。
10、优选的,所述中柱的外周面设置有橡胶凸缘,所述橡胶凸缘的外周面和滚轮的外周面相互抵接。
11、优选的,所述旋转驱动单元为安装在横板底端一侧的减速电机,减速电机的输出端与其中一组主轴的底端相互连接,所述减速电机的输入端与电机控制器的输出端电性连接。
12、优选的,所述连杆的两端部皆安装有转向球头,所述连杆的两端分别通过转向球头与丝杆直线模组的螺母副移动端、平台单体的底端相互铰接。
13、优选的,所述托盘的底端固定有外防护罩。
14、与现有技术相比,本实用新型的有益效果是:该多自由度运动模拟平台通过设置有丝杆直线模组和连杆等相互配合的结构,电机控制器根据控制信号向减速电机以及六组丝杆直线模组发出工作信号,从而在平台单体、座椅的六个边角处控制其位置、动作速度、姿态以及周向回转角度,相较于传统的液压缸驱动平台,减速电机、丝杆直线模组具有高精度、高灵敏度的特点,能够实现精确的运动控制,满足复杂运动场景下的控制需求,可以精确控制运动的速度和位置,同时也降低了惯性和颠簸等因素的影响,提高了运动平台的稳定性,且不需要大型液压系统的支持,从而减小了整个系统的体积和重量,简化了系统结构和安装过程,对于运动规划和路径控制也更加方便,易于编写程序实现自动化控制,提高了整体性能,降低使用以及构建成本。
技术特征:
1.多自由度运动模拟平台,其特征在于,包括:
2.根据权利要求1所述的多自由度运动模拟平台,其特征在于:所述横板(2)底端的两侧对称安装有支板(3)。
3.根据权利要求1所述的多自由度运动模拟平台,其特征在于:所述立式回转结构包括安装在固定在立板(1)一侧外壁上的轴承座(101),以及轴承座(101)内部转动安装的主轴(102),所述主轴(102)表面的一端固定有滚轮(103),所述滚轮(103)的外周面和中柱(6)的外周面向抵接。
4.根据权利要求3所述的多自由度运动模拟平台,其特征在于:所述中柱(6)的外周面设置有橡胶凸缘(7),所述橡胶凸缘(7)的外周面和滚轮(103)的外周面相互抵接。
5.根据权利要求3所述的多自由度运动模拟平台,其特征在于:所述旋转驱动单元为安装在横板(2)底端一侧的减速电机(5),减速电机(5)的输出端与其中一组主轴(102)的底端相互连接,所述减速电机(5)的输入端与电机控制器(4)的输出端电性连接。
6.根据权利要求1所述的多自由度运动模拟平台,其特征在于:所述连杆(11)的两端部皆安装有转向球头,所述连杆(11)的两端分别通过转向球头与丝杆直线模组(9)的螺母副移动端、平台单体(10)的底端相互铰接。
7.根据权利要求1所述的多自由度运动模拟平台,其特征在于:所述托盘(8)的底端固定有外防护罩(801)。
技术总结
本技术公开了多自由度运动模拟平台,包括U字架,U字架由两组立板以及一组横板焊接组成;中柱,所述中柱转动安装在横板顶端的中心位置处,且所述中柱的顶端固定有托盘;立式回转结构,所述立式回转结构安装在立板靠近横板中心点的一侧外壁上,每组立板上设置有两组所述立式回转结构,用于驱动中柱发生自转。本技术具有高精度、高灵敏度的特点,能够实现精确的运动控制,满足复杂运动场景下的控制需求,可以精确控制运动的速度和位置,且不需要大型液压系统的支持,从而减小了整个系统的体积和重量,简化了系统结构和安装过程,降低使用以及构建成本。
技术研发人员:高冰,李松,吕秀宾,王迪,杨升,杜超,王学熠,宋浩然,张学,宋长德,苏鸿羽
受保护的技术使用者:中航大(天津)模拟机工程技术有限公司
技术研发日:20230807
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!