基于数字孪生的运动控制实训方法及系统与流程
本发明涉及机电实训,具体是涉及一种基于数字孪生的运动控制实训方法及系统。
背景技术:
1、需要说明的是,进行自动化培训教学时,最大的支出就是机电设备本体,一套工业机器人综合实训装备最小投入需要25万左右,而且也只能满足1人或2人同时使用,导致人均教学成本高,且由于学生并不能够熟练使用实训装备,导致实训装备在使用时发生损坏,维护成本较高。因此,需要提供一种基于数字孪生的运动控制实训方法及系统,旨在解决上述问题。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种基于数字孪生的运动控制实训方法及系统,以解决上述背景技术中存在的问题。
2、本发明是这样实现的,一种基于数字孪生的运动控制实训方法,所述方法包括以下步骤:
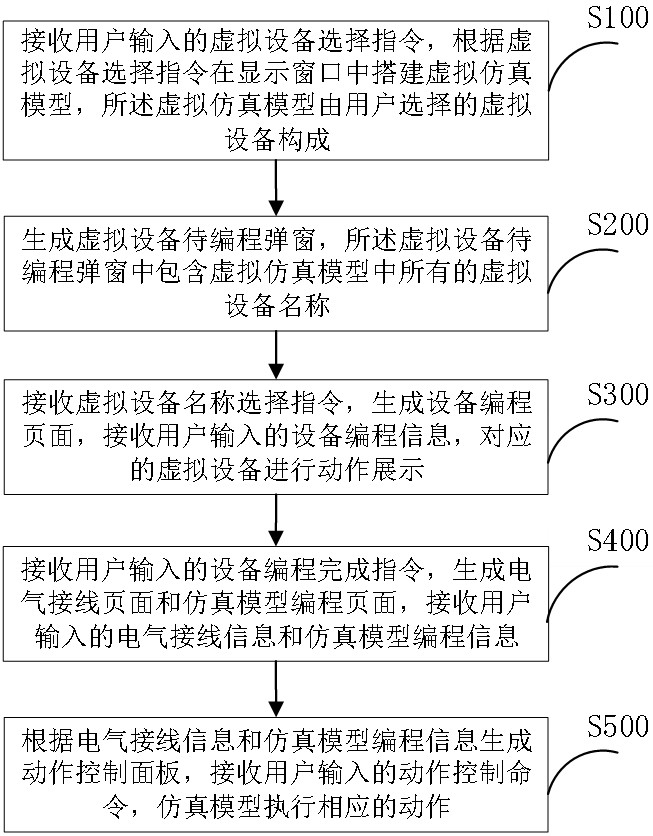
3、接收用户输入的虚拟设备选择指令,根据虚拟设备选择指令在显示窗口中搭建虚拟仿真模型,所述虚拟仿真模型由用户选择的虚拟设备构成;
4、生成虚拟设备待编程弹窗,所述虚拟设备待编程弹窗中包含虚拟仿真模型中所有的虚拟设备名称;
5、接收虚拟设备名称选择指令,生成设备编程页面,接收用户输入的设备编程信息,对应的虚拟设备进行动作展示;
6、接收用户输入的设备编程完成指令,生成电气接线页面和仿真模型编程页面,接收用户输入的电气接线信息和仿真模型编程信息;
7、根据电气接线信息和仿真模型编程信息生成动作控制面板,接收用户输入的动作控制命令,仿真模型执行相应的动作。
8、作为本发明进一步的方案:所述接收用户输入的虚拟设备选择指令,根据虚拟设备选择指令在显示窗口中搭建虚拟仿真模型的步骤,具体包括:
9、接收用户输入的虚拟设备选择指令,所述虚拟设备选择指令包括若干个虚拟设备名称,每个虚拟设备名称对应有位置坐标;
10、根据位置坐标使得对应的虚拟设备在显示窗口中显示,搭建虚拟仿真模型。
11、作为本发明进一步的方案:所述接收用户输入的设备编程信息,对应的虚拟设备进行动作展示的步骤,具体包括:
12、接收用户输入的设备编程信息,根据设备编程信息确定设备动作、动作参数和动作顺序;
13、根据设备动作、动作参数和动作顺序使得对应的虚拟设备进行动作预览展示;
14、接收设备编程信息保存指令,将保存的设备编程信息与虚拟设备进行绑定。
15、作为本发明进一步的方案:所述根据电气接线信息和仿真模型编程信息生成动作控制面板的步骤,具体包括:
16、对电气接线信息和仿真模型编程信息进行分析,确定虚拟仿真模型中所有的虚拟设备之间的动作关系以及存在的动作控制命令;
17、根据动作控制命令生成动作控制面板,动作控制面板中包含若干个动作控制命令,用户通过动作控制面板能够对虚拟仿真模型进行控制;
18、接收接线编程信息保存指令,将电气接线信息和仿真模型编程信息进行保存,并与虚拟仿真模型进行绑定。
19、作为本发明进一步的方案:所述方法还包括:
20、接收控制面板分散控制信息,将动作控制面板发送至多个用户账号;
21、接收多个用户账号发送的动作控制命令,根据多个动作控制命令使得虚拟仿真模型中的各个虚拟设备进行协同运作。
22、本发明的另一目的在于提供一种基于数字孪生的运动控制实训系统,所述系统包括:
23、虚拟设备选择模块,用于接收用户输入的虚拟设备选择指令,根据虚拟设备选择指令在显示窗口中搭建虚拟仿真模型,所述虚拟仿真模型由用户选择的虚拟设备构成;
24、待编程弹窗模块,用于生成虚拟设备待编程弹窗,所述虚拟设备待编程弹窗中包含虚拟仿真模型中所有的虚拟设备名称;
25、虚拟设备编程模块,用于接收虚拟设备名称选择指令,生成设备编程页面,接收用户输入的设备编程信息,对应的虚拟设备进行动作展示;
26、电气接线确定模块,用于接收用户输入的设备编程完成指令,生成电气接线页面和仿真模型编程页面,接收用户输入的电气接线信息和仿真模型编程信息;
27、控制面板生成模块,用于根据电气接线信息和仿真模型编程信息生成动作控制面板,接收用户输入的动作控制命令,仿真模型执行相应的动作。
28、作为本发明进一步的方案:所述虚拟设备选择模块包括:
29、选择指令接收单元,用于接收用户输入的虚拟设备选择指令,所述虚拟设备选择指令包括若干个虚拟设备名称,每个虚拟设备名称对应有位置坐标;
30、仿真模型搭建单元,用于根据位置坐标使得对应的虚拟设备在显示窗口中显示,搭建虚拟仿真模型。
31、作为本发明进一步的方案:所述虚拟设备编程模块包括:
32、设备编程接收单元,用于接收用户输入的设备编程信息,根据设备编程信息确定设备动作、动作参数和动作顺序;
33、设备动作展示单元,用于根据设备动作、动作参数和动作顺序使得对应的虚拟设备进行动作预览展示;
34、第一绑定单元,用于接收设备编程信息保存指令,将保存的设备编程信息与虚拟设备进行绑定。
35、作为本发明进一步的方案:所述控制面板生成模块包括:
36、信息分析单元,用于对电气接线信息和仿真模型编程信息进行分析,确定虚拟仿真模型中所有的虚拟设备之间的动作关系以及存在的动作控制命令;
37、控制面板生成单元,用于根据动作控制命令生成动作控制面板,动作控制面板中包含若干个动作控制命令,用户通过动作控制面板能够对虚拟仿真模型进行控制;
38、第二绑定单元,用于接收接线编程信息保存指令,将电气接线信息和仿真模型编程信息进行保存,并与虚拟仿真模型进行绑定。
39、作为本发明进一步的方案:所述系统还包括模型分散控制模块,模型分散控制模块具体包括:
40、分散控制信息单元,用于接收控制面板分散控制信息,将动作控制面板发送至多个用户账号;
41、模型协同运作单元,用于接收多个用户账号发送的动作控制命令,根据多个动作控制命令使得虚拟仿真模型中的各个虚拟设备进行协同运作。
42、与现有技术相比,本发明的有益效果是:
43、本发明通过数字孪生将实体的实训装备使用虚拟仿真模型进行替代,能够根据学生输入的电气接线信息和仿真模型编程信息生成动作控制面板,学生输入动作控制命令,仿真模型执行相应的动作,虽然设备是虚拟的,但是能够锻炼学生实际的电气接线和编程控制能力,能够达到自动化培训的目的,且人均教学成本大幅度下降,值得推广。
技术特征:
1.基于数字孪生的运动控制实训方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的基于数字孪生的运动控制实训方法,其特征在于,所述接收用户输入的虚拟设备选择指令,根据虚拟设备选择指令在显示窗口中搭建虚拟仿真模型的步骤,具体包括:
3.根据权利要求2所述的基于数字孪生的运动控制实训方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的基于数字孪生的运动控制实训方法,其特征在于,搬运难度值的计算公式表示为:
5.根据权利要求4所述的基于数字孪生的运动控制实训方法,其特征在于,所述接收用户输入的设备编程信息,对应的虚拟设备进行动作展示的步骤,具体包括:
6.根据权利要求5所述的基于数字孪生的运动控制实训方法,其特征在于,在根据设备动作、动作参数和动作顺序使得对应的虚拟设备进行动作预览展示的方法中,所述步骤还包括:
7.根据权利要求6所述的基于数字孪生的运动控制实训方法,其特征在于,每个设备动作的单项动作难度值的计算公式表示为;
8.根据权利要求7所述的基于数字孪生的运动控制实训方法,其特征在于,所述根据电气接线信息和仿真模型编程信息生成动作控制面板的步骤,具体包括:
9.根据权利要求8所述的基于数字孪生的运动控制实训方法,其特征在于,所述方法还包括:
10.基于数字孪生的运动控制实训系统,其特征在于,应用如权利要求1至9任一项所述的基于数字孪生的运动控制实训方法,所述系统包括:
技术总结
本发明适用于机电实训技术领域,提供了基于数字孪生的运动控制实训方法及系统,包括以下步骤:接收用户输入的虚拟设备选择指令,根据虚拟设备选择指令在显示窗口中搭建虚拟仿真模型;生成虚拟设备待编程弹窗,虚拟设备待编程弹窗包含虚拟仿真模型中虚拟设备的名称;接收虚拟设备名称选择指令,生成设备编程页面,接收用户输入的设备编程信息;接收用户输入的设备编程完成指令,生成电气接线页面和仿真模型编程页面,接收电气接线信息和仿真模型编程信息;根据电气接线信息和仿真模型编程信息生成动作控制面板,接收用户输入的动作控制命令,仿真模型执行相应的动作。通过虚拟设备锻炼学生实际的电气接线和编程控制能力,教学成本大幅度下降。
技术研发人员:肖洋洋,苏横军,艾龙龙
受保护的技术使用者:南昌菱形信息技术有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!