一种采用爬壁机器人的高大内墙壁纸铺贴方法与流程
本发明涉及建筑装饰领域,具体涉及一种采用爬壁机器人的高大内墙壁纸铺贴方法。
背景技术:
1、现今,在建筑装饰领域,由于壁纸美观且又具个性,相对于其他的建材而言成本较低,所以壁纸越来越受到广大居民的喜爱,被广泛用于室内装修。然而,因材料使用不当或施工控制不到位导致壁纸霉变,已成为装饰工程中的常见质量问题。采用传统的人工铺贴的方式,在高处施工时需要架设梯子,比较麻烦,且存在一定的安全隐患。
2、现有技术cn110733285a公开了一种升降作业支架及壁纸铺贴装置。升降作业支架含基架、作业台、升降机构、牵引机构及驱动机构。升降机构滑动设于基架,含n级升降结构,n为≥2整数。牵引机构含n级牵引绳,第1级牵引绳第一端连基架,第p级牵引绳第一端连第p-1级升降结构,p为≥2且≤n整数,第q级牵引绳第二端连第q+1级升降结构,q为≥1且≤n-1整数,第n级牵引绳第二端连作业台,每级牵引绳与同级升降结构滑动配合。驱动机构能驱动第1级升降结构远离基架底部,使每级升降结构相对牵引绳第一端远离基架并带动牵引绳第二端远离基架。其对作业台升降效率高,但该壁纸铺贴装置占地面积较大,不便于运输。
技术实现思路
1、为解决现有技术中存在的技术问题,本发明提供了一种采用爬壁机器人的高大内墙壁纸铺贴方法,实现大面积壁纸的快速平稳铺贴,还可以通过防霉措施来防止壁纸霉变。
2、为达到上述目的,本发明的技术解决方案如下:
3、一种采用爬壁机器人的高大内墙壁纸铺贴方法,其特征在于,所述方法包括以下步骤:
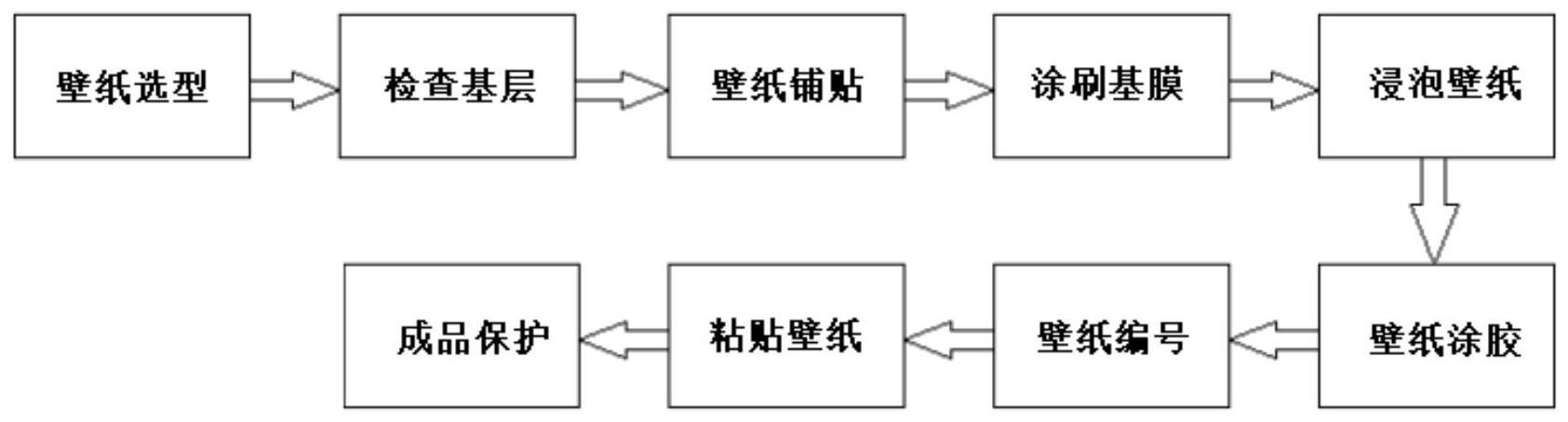
4、步骤一,对墙面拟铺贴部位建模并对壁纸编号,根据编号选择壁纸及型号;
5、步骤二,墙面基层处理,墙体基层粉刷石膏抹灰不落地,确保墙体基层符合施工的各项指标,爬壁机器人携带滚筒刷涂刷基膜不少于两遍,确保涂刷均匀无漏涂;
6、步骤三,将选择好的壁纸按品种、花色、规格进行选配、拼花、裁切和编号,浸泡待铺贴的壁纸,初步在壁纸背面均匀地涂上壁纸胶,再利用爬壁机器人携带整幅铺贴壁纸,铺贴时按编号顺序粘贴,铺贴顺序为先垂直平行铺贴,再水平从上而下铺贴,先细部后大面,铺贴完后通过爬壁机器人携带刮板将壁纸刮平,用刮板将壁纸刮平并将壁纸内的杂物赶出,壁纸的阴阳角采用阴阳角压轮压平,裱糊壁纸时擦拭干净接缝处溢出的胶水;
7、步骤四,安装踢脚线、门套线,确保收边处贴合严密、顺直,铺贴完壁纸后采取成品保护措施。
8、作为优选的技术方案,在步骤二中,墙体基层距地150mm高处采用水泥砂浆抹灰,墙体基层施工的各项指标包括垂直平整度误差不超过1mm、无空鼓和开裂现象、基层牢固无粉化。
9、作为优选的技术方案,在步骤二中,新铺地砖、石材养护7天,检测墙面四周含水率,确保抹灰基层含水率不超过10%,木材基层含水率不超过12%,再进行壁纸施工。
10、作为优选的技术方案,在步骤二中,爬壁机器人包括主体、抽吸泵、输入管、夹持机构、控制系统和驱动机构,主体内设有负压腔,抽吸泵通过输入管与负压腔内部连接,驱动机构包括四个电机和四个滚轮,四个电机对称固定安装在主体的下方两侧,电机与滚轮一一对应,电机的转轴与滚轮传动连接,抽吸泵和四个电机均与控制系统通过信号连接,夹持机构包括两个l形的夹持臂,夹持臂通过螺栓与主体上部固定连接。
11、作为优选的技术方案,在步骤三中,壁纸的种类包括塑料壁纸、背胶壁纸、金属壁纸。
12、作为优选的技术方案,在步骤三中,壁纸裁切时使用刀片倾斜30°进行裁切,确保裁切边顺直、无破损。
13、作为优选的技术方案,在步骤三中,在爬壁机器人上设有可拆卸的铺贴组件,该铺贴组件夹持在夹持机构上,所述铺贴组件包括有壁纸筒安放杆、胶水辊和压实辊,所述的胶水辊和压实辊紧贴在一起且与壁纸筒安放杆平行,所述的壁纸筒卡入在壁纸筒安放杆内,拉出的壁纸卡在胶水辊和压实辊之间,通过胶水辊补充涂覆胶水在壁纸背面,再次涂覆胶水后的壁纸经压实辊贴在墙壁上。
14、作为优选的技术方案,在步骤三中,壁纸铺贴时,先保证垂直后壁纸图案吻合且图案端正,垂直面从上往下铺,先铺长墙面后铺短墙面,水平面铺设时从高到低铺设。
15、作为优选的技术方案,在步骤三中,铺贴壁纸时确保空气相对湿度不超过85%,铺贴完48小时后开窗通风。
16、作为优选的技术方案,在步骤四中,成品保护措施包括在壁纸表面贴塑料薄膜、报纸覆盖。
17、与现有技术相比,本发明的一种采用爬壁机器人的高大内墙壁纸铺贴方法的有益效果为:
18、(1)本发明的一种采用爬壁机器人的高大内墙壁纸铺贴方法,详细说明了壁纸铺设时的步骤顺序和铺贴注意事项,充分利用爬壁机器人来从事大面积规则操作以替代人工,高效完成基膜涂刷和壁纸铺贴,铺贴平整质量可控,尤其适用于大型场馆类公共建筑内墙装饰。
19、(2)本发明作为一种采用爬壁机器人的高大内墙壁纸铺贴方法,采取严格的防霉操作,明确温湿度环境和铺贴参数设置,可以有效防止壁纸霉变,减少污染和破坏。
20、(3)本发明的爬壁机器人除了进行基膜涂刷操作以外,更关键在于壁纸铺贴,壁纸上的胶水采用两次涂覆的方式,地下涂覆完成后再铺贴前再次利用胶水辊二次涂刷胶水后再进行压实,从而增加胶水涂覆量和涂覆均匀度,实现胶水辊和压实辊配合铺贴,与单次涂覆再进行人工铺贴相比,大大提高了壁纸的铺贴质量,减少气泡和杂质。
21、(4)本发明的一种采用爬壁机器人的高大内墙壁纸铺贴方法,采用爬壁机器人辅助铺贴壁纸,提高了工作效率,只需要特殊位置诸如阴阳角处进行人工辅助,大大减少了人工架设梯子在高处作业的危险性,提高了施工安全性。
技术特征:
1.一种采用爬壁机器人的高大内墙壁纸铺贴方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的一种采用爬壁机器人的高大内墙壁纸铺贴方法,其特征在于,在步骤二中,墙体基层距地150mm高处采用水泥砂浆抹灰,墙体基层施工的各项指标包括垂直平整度误差不超过1mm、无空鼓和开裂现象、基层牢固无粉化。
3.根据权利要求1所述的一种采用爬壁机器人的高大内墙壁纸铺贴方法,其特征在于,在步骤二中,新铺地砖、石材养护7天,检测墙面四周含水率,确保抹灰基层含水率不超过10%,木材基层含水率不超过12%,再进行壁纸施工。
4.根据权利要求1所述的一种采用爬壁机器人的高大内墙壁纸铺贴方法,其特征在于,在步骤二中,所述爬壁机器人包括主体、抽吸泵、输入管、夹持机构、控制系统和驱动机构,所述主体内设有负压腔,所述抽吸泵通过输入管与所述负压腔内部连接,所述驱动机构包括四个电机和四个滚轮,四个电机对称固定安装在所述主体的下方两侧,所述电机与滚轮一一对应,所述电机的转轴与所述滚轮传动连接,所述抽吸泵和四个电机均与所述控制系统通过信号连接,所述夹持机构包括两个l形的夹持臂,所述夹持臂通过螺栓与主体上部固定连接。
5.根据权利要求4所述的一种采用爬壁机器人的高大内墙壁纸铺贴方法,其特征在于,在所述步骤三中,在爬壁机器人上设有可拆卸的铺贴组件,该铺贴组件夹持在夹持机构上,所述铺贴组件包括有壁纸筒安放杆、胶水辊和压实辊,所述的胶水辊和压实辊紧贴在一起且与壁纸筒安放杆平行,所述的壁纸筒卡入在壁纸筒安放杆内,拉出的壁纸卡在胶水辊和压实辊之间,通过胶水辊补充涂覆胶水在壁纸背面,再次涂覆胶水后的壁纸经压实辊贴在墙壁上。
6.根据权利要求1所述的一种采用爬壁机器人的高大内墙壁纸铺贴方法,其特征在于,在所述步骤三中,壁纸的品种包括塑料壁纸、背胶壁纸和金属壁纸。
7.根据权利要求1所述的一种采用爬壁机器人的高大内墙壁纸铺贴方法,其特征在于,在所述步骤三中,壁纸裁切时使用刀片倾斜30°进行裁切,裁切边顺直无破损。
8.根据权利要求1所述的一种采用爬壁机器人的高大内墙壁纸铺贴方法,其特征在于,在所述步骤三中,壁纸铺贴时,先保证垂直后壁纸图案吻合且图案端正,垂直面从上往下铺,先铺长墙面后铺短墙面,垂直铺贴完成后以水平面铺设时从高到低铺设。
9.根据权利要求1所述的一种采用爬壁机器人的高大内墙壁纸铺贴方法,其特征在于,在所述步骤三中,铺贴壁纸时确保空气相对湿度不超过85%,铺贴完48小时后开窗通风。
10.根据权利要求1所述的一种采用爬壁机器人的高大内墙壁纸铺贴方法,其特征在于,在所述步骤四中,成品保护措施包括在壁纸表面贴塑料薄膜、报纸覆盖。
技术总结
本发明涉及一种采用爬壁机器人的高大内墙壁纸铺贴方法,包括选择壁纸的型号;墙体基层粉刷石膏抹灰不落地,确保墙体基层符合施工的各项指标,由爬壁机器人涂刷基膜;浸泡壁纸,涂刷均匀壁纸胶,用刮板将壁纸刮平并将壁纸内的杂物赶出,壁纸的阴阳角采用专用阴阳角压轮压平,铺贴壁纸时擦拭干净接缝处溢出的胶水;将壁纸按品种、花色、规格进行选配、拼花、裁切、编号,铺贴时按顺序粘贴;壁纸整幅铺贴;安装踢脚线、门套线,铺贴完后采取成品保护措施。本发明的一种采用爬壁机器人的高大内墙壁纸铺贴方法,步骤完善,可以有效防止壁纸霉变,减少污染和破坏,且通过爬壁机器人辅助施工,提高了工作效率和安全性。
技术研发人员:赵艳,张旭东,孙红星
受保护的技术使用者:上海金茂建筑装饰有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!