一种吸声装置、水下航行器的制作方法
本技术涉及降噪领域,尤其涉及一种吸声装置、水下航行器。
背景技术:
1、水下机器人及水下潜航器在水下的运动,水流与水下机器人及水下潜航器的表面相互作用,产生水动力噪声,干扰并影响水下设备的正常探测。
2、如何在宽频范围内,对水下航行器的水动力噪声进行抑制日益受到关注。
技术实现思路
1、本实用新型的目的在于提供一种吸声装置、水下航行器,以解决水下设备在宽频范围的水下水动力流噪声高的技术问题。
2、为了实现上述目的,本实用新型提供如下技术方案:
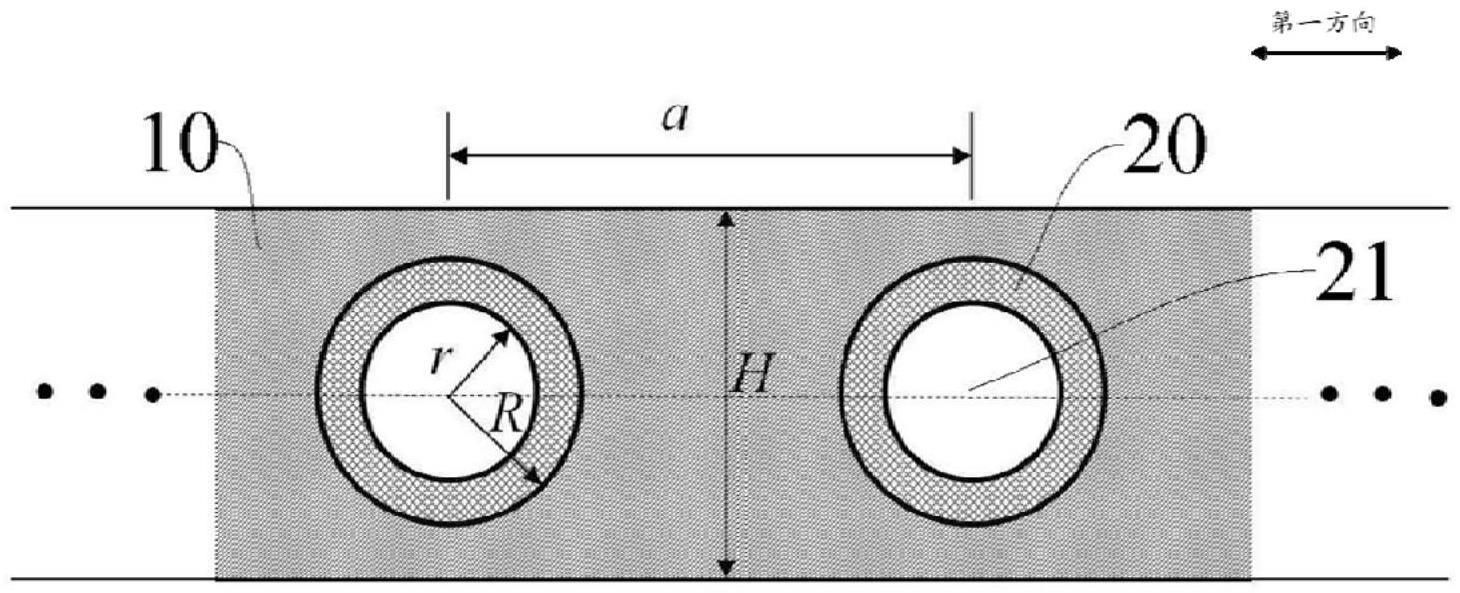
3、第一方面,本实用新型实施例提供一种吸声装置,用于对在水中的航行对象降噪,所述吸声装置包括柔性层以及位于所述柔性层内的多个吸声部,所述柔性层用于覆盖在所述航行对象的至少部分表面;
4、各个所述吸声部沿着第一方向分布,所述第一方向与所述柔性层的厚度方向相交,所述柔性层的厚度方向为远离所述航行对象的方向;
5、每个所述吸声部为具有腔体的柱状结构,每个所述吸声部的轴向长度延伸方向为第二方向,所述第二方向垂直于所述第一方向。
6、根据本实用新型的至少一个实施方式,所述腔体的轴线与所述吸声部的轴线共线。
7、根据本实用新型的至少一个实施方式,每个所述吸声部的外表面为圆柱状、椭圆柱状或棱柱状结构中的至少一种。
8、根据本实用新型的至少一个实施方式,每个所述吸声部的外表面以及相应的所述腔体均为圆柱状结构;或者,
9、每个所述吸声部的外表面以及相应的所述腔体均为椭圆柱状结构;或者,
10、每个所述吸声部的外表面以及相应的所述腔体均为棱柱状结构。
11、根据本实用新型的至少一个实施方式,沿着所述第二方向,所述柔性层具有供所述吸声部穿过的通孔,每个所述吸声部的端部均与所述柔性层相应端部平齐。
12、根据本实用新型的至少一个实施方式,所述柔性层为采用水凝胶制备而成的构件;和/或,
13、所述吸声部为采用橡胶、聚氨酯中的一种制备而成的构件。
14、根据本实用新型的至少一个实施方式,沿着所述第一方向,相邻两个所述吸声部的间隔为a,所述柔性层的厚度为h,h:a=(0.8~1.25):1。
15、根据本实用新型的至少一个实施方式,每个所述吸声部的外表面以及相应的所述腔体均为圆柱状结构,每个所述吸声部外表面的半径为r,每个所述吸声部的腔体的半径为r,(r-r):r=1:(1~6)。
16、根据本实用新型的至少一个实施方式,其特征在于,h≤20mm。
17、本实用新型示例性实施例中提供的一个或多个技术方案中,通过将柔性层以及设在柔性层中的多个吸声部,由于多个吸声部沿着第一方向分布在柔性层中,吸声部为具有腔体的柱状结构,多个吸声部与柔性层相互协同可以在宽频范围内吸收水下流噪声,使得柔性层在覆盖在航行对象的部分或全部表面时,柔性层不仅具有柔性减阻的特性,同时还具有吸声性能。实验表明,本实用新型示例性实施例提供的吸声装置在中心频率1000hz处实现了0.35以上的吸声系数。
18、第二方面,本实用新型还提供一种水下航行器,所述水下航行器的至少部分部位覆盖有第一方面提供的吸声装置。
19、所述水下航行器相对于现有技术所具有的优势与第一方面提供的吸声装置相对于现有技术所具有的优势相同,在此不再赘述。
技术特征:
1.一种吸声装置,其特征在于,用于对在水中的航行对象降噪,所述吸声装置包括柔性层以及位于所述柔性层内的多个吸声部,所述柔性层用于覆盖在所述航行对象的至少部分表面;
2.根据权利要求1所述的吸声装置,其特征在于,所述腔体的轴线与所述吸声部的轴线共线。
3.根据权利要求2所述的吸声装置,其特征在于,每个所述吸声部的外表面为圆柱状、椭圆柱状或棱柱状结构中的至少一种。
4.根据权利要求3所述的吸声装置,其特征在于,每个所述吸声部的外表面以及相应的所述腔体均为圆柱状结构;或者,
5.根据权利要求1-4任一项所述的吸声装置,其特征在于,沿着所述第二方向,所述柔性层具有供所述吸声部穿过的通孔,每个所述吸声部的端部均与所述柔性层相应端部平齐。
6.根据权利要求5所述的吸声装置,其特征在于,所述柔性层为采用水凝胶制备而成的构件;和/或,
7.根据权利要求5所述的吸声装置,其特征在于,各个所述吸声部沿着所述第一方向均匀分布,相邻两个所述吸声部的间隔为a,所述柔性层的厚度为h,h:a=(0.8~1.25):1。
8.根据权利要求5所述的吸声装置,其特征在于,每个所述吸声部的外表面以及相应的所述腔体均为圆柱状结构,每个所述吸声部外表面的半径为r,每个所述吸声部的腔体的半径为r,(r-r):r=1:(1~6)。
9.根据权利要求7所述的吸声装置,其特征在于,h≤20mm。
10.一种水下航行器,其特征在于,所述水下航行器的至少部分部位覆盖有权利要求1-9任一项所述的吸声装置。
技术总结
本技术提供了一种吸声装置、水下航行器,涉及降噪领域,以解决水下设备在宽频范围的水下水动力流噪声高的技术问题。该吸声装置包括柔性层以及位于柔性层内的多个吸声部,柔性层用于覆盖在航行对象的至少部分表面;各个吸声部沿着第一方向分布,第一方向与柔性层的厚度方向相交,柔性层的厚度方向为远离航行对象的方向;每个吸声部为具有腔体的柱状结构,每个吸声部的轴向长度延伸方向为第二方向,第二方向垂直于第一方向。本技术的吸声装置通过在柔性层中嵌入吸声部配合使用,使得吸声装置在宽频率的噪声范围内实现抑制。该吸声装置用于对在水中的航行对象降噪。
技术研发人员:张若军,王桂波,左世磊,张思维,窦松然,王勃,刘鑫,黄婉君
受保护的技术使用者:船舶信息研究中心(中国船舶集团有限公司第七一四研究所)
技术研发日:20230427
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!