一种飞行区助航灯智能控制系统以及控制方法与流程
本发明属于计算机领域,尤其涉及一种飞行区助航灯智能控制系统以及控制方法。
背景技术:
1、助航灯,一般指机场/直升机场助航灯,是用来保证飞机在夜间和复杂天气条件下顺利起飞、着落和滑行的目视助航设备;助航灯光一般由进近灯光系统、跑道灯光系统、滑行道灯光系统等组成。
2、在跑道灯光系统、滑行道灯光系统中,对跑道入口灯、跑道翼排灯、跑道中线灯、滑行道边灯和滑行道中线灯而言,跑道边灯和滑行道边灯能够直接限定和指引飞机行进过程中的边界,因而相对而言,跑道边灯和滑行道边灯是两种极为重要的灯光,一般处于跑道和滑行道边线的外侧,现有技术中,当跑道边灯和/或滑行道边灯损坏时,影响飞机的目视助航,但是当维修时间非常紧急时,人为的维护难以应对该种场景,因此,提出一种飞行区助航灯智能控制系统以及控制方法。
技术实现思路
1、本发明实施例的目的在于提供一种飞行区助航灯智能控制系统以及控制方法,旨在解决上述背景技术中提出的问题。
2、本发明实施例是这样实现的,一方面,一种飞行区助航灯智能控制方法,所述方法包括以下步骤:
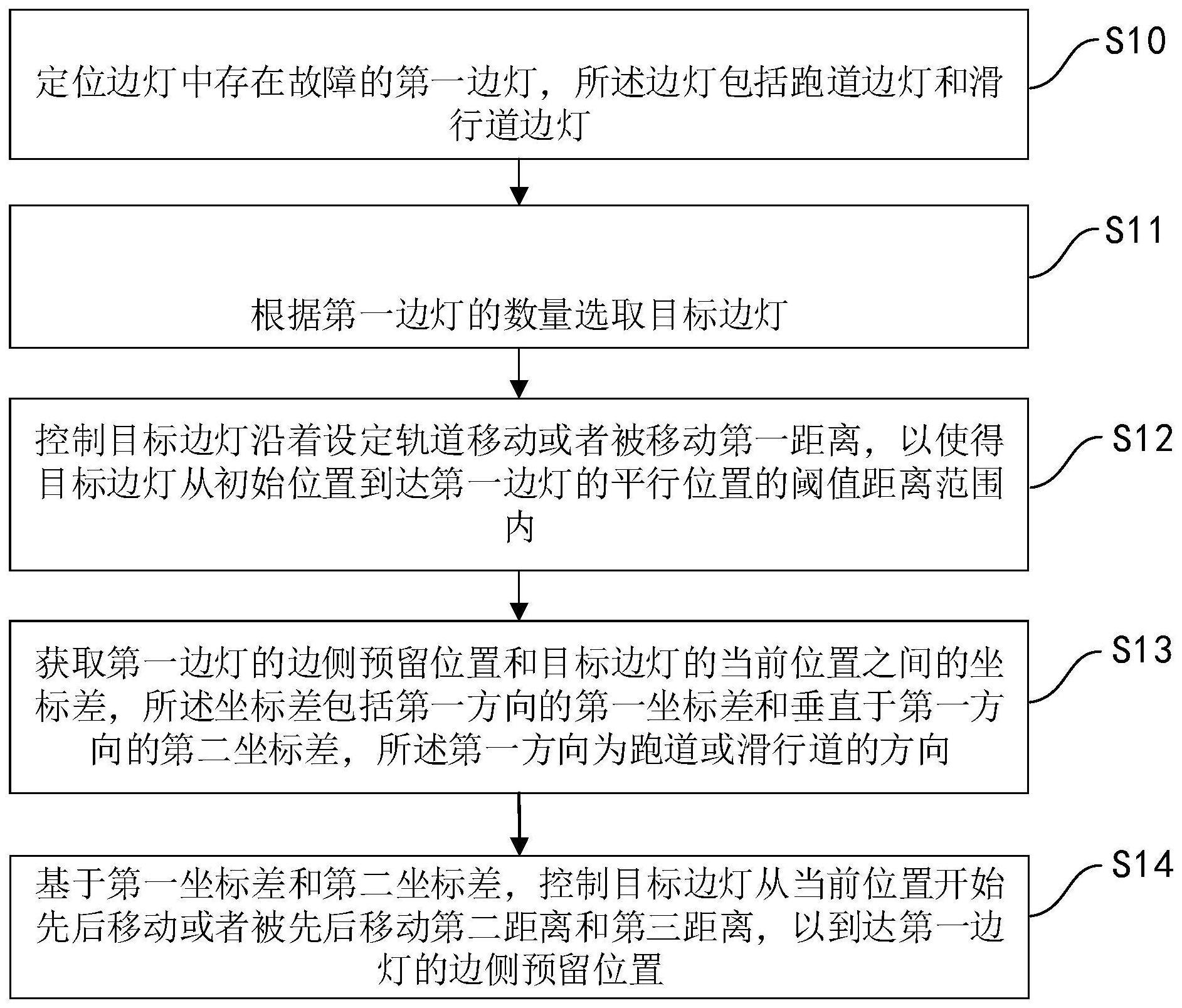
3、定位边灯中存在故障的第一边灯,所述边灯包括跑道边灯和滑行道边灯;
4、根据第一边灯的数量选取目标边灯;
5、控制目标边灯沿着设定轨道移动或者被移动第一距离,以使得目标边灯从初始位置到达第一边灯的平行位置的阈值距离范围内;其中,所述设定轨道设置在跑道和滑行道外侧。
6、获取第一边灯的边侧预留位置和目标边灯的当前位置之间的坐标差,所述坐标差包括第一方向的第一坐标差和垂直于第一方向的第二坐标差,所述第一方向为跑道或滑行道的方向;
7、基于第一坐标差和第二坐标差,控制目标边灯从当前位置开始先后移动或者被先后移动第二距离和第三距离,以到达第一边灯的边侧预留位置。
8、作为本发明的进一步方案,所述根据第一边灯的数量选取目标边灯包括:
9、获取第一边灯的单侧数量;
10、根据所述单侧数量以及助航延伸方向确定每次从初始位置释放的目标边灯的数量以及先后顺序,其中,所述目标边灯与第一边灯一一对应,第一边灯在助航延伸方向中所处的位置越靠前,第一边灯对应的目标边灯的释放顺序越靠前。
11、作为本发明的再进一步方案,所述根据所述单侧数量以及助航延伸方向确定每次从初始位置释放的目标边灯的数量以及先后顺序包括:
12、判断所述单侧数量是否大于1;
13、当所述单侧数量大于1时,判断是否存在相邻的至少两个第一边灯;
14、若是,则根据相邻的至少两个第一边灯确定同步释放目标灯组;
15、对同步释放目标灯组进行同步释放。
16、作为本发明的又进一步方案,所述方法还包括:
17、基于助航延伸方向,将同步释放目标灯组中处于相对后位的目标边灯作为中心目标边灯,其他的目标边灯为非中心目标边灯;
18、控制同步释放目标灯组同步移动或者被同步移动第一距离后,分别控制非中心目标边灯和中心目标边灯分离后继续设定轨道移动或者被移动边灯间隔距离;
19、建立中心目标边灯和非中心目标边灯之间的同步控制机制,以使得中心目标边灯和非中心目标边灯同步移动或者被移动第二距离和第三距离后,分别到达各自对应的第一边灯的边侧预留位置。
20、作为本发明的进一步方案,所述建立中心目标边灯和非中心目标边灯之间的同步控制机制包括:
21、根据同步控制指令,当控制中心目标边灯每移动设定移动距离时,控制非中心目标边灯平行移动设定移动距离,以使得中心目标边灯和非中心目标边灯分别同步移动第二距离和第三距离。
22、作为本发明的进一步方案,在控制目标边灯从当前位置开始先后移动或者被先后移动第二距离和第三距离之后,所述方法还包括:
23、获取目标边灯的定位指示,根据所述定位指示下发灯光控制指令,以使得目标边灯的灯光变化符合第一边灯故障之前的灯光设定。
24、作为本发明的进一步方案,所述方法还包括:
25、检测当前飞机进入跑道的剩余时长,根据所述剩余时长分别分配第一距离、第二距离和第三距离中目标边灯移动或者被移动的速度,以使得目标边灯移动或者被移动的总时长不大于剩余时长,进一步限定的,所述目标边灯在第一距离中的速度大于在第二距离和第三距离中的速度。
26、作为本发明的进一步方案,另一方面,一种飞行区助航灯智能控制系统,所述系统包括:
27、故障定位模块,用于定位边灯中存在故障的第一边灯,所述边灯包括跑道边灯和滑行道边灯;
28、目标边灯选取模块,用于根据第一边灯的数量选取目标边灯;
29、第一控制模块,用于控制目标边灯沿着设定轨道移动或者被移动第一距离,以使得目标边灯从初始位置到达第一边灯的平行位置的阈值距离范围内;
30、坐标计算模块,用于获取第一边灯的边侧预留位置和目标边灯的当前位置之间的坐标差,所述坐标差包括第一方向的第一坐标差和垂直于第一方向的第二坐标差,所述第一方向为跑道或滑行道的方向;
31、第二控制模块,用于基于第一坐标差和第二坐标差,控制目标边灯从当前位置开始先后移动或者被先后移动第二距离和第三距离,以到达第一边灯的边侧预留位置。
32、本发明实施例提供的一种飞行区助航灯智能控制系统以及控制方法,通过定位边灯中存在故障的第一边灯,根据第一边灯的数量选取目标边灯;控制目标边灯沿着设定轨道移动或者被移动第一距离,以使得目标边灯从初始位置到达第一边灯的平行位置的阈值距离范围内;其中,所述设定轨道设置在跑道和滑行道外侧;获取第一边灯的边侧预留位置和目标边灯的当前位置之间的坐标差,所述坐标差包括第一方向的第一坐标差和垂直于第一方向的第二坐标差,所述第一方向为跑道或滑行道的方向;基于第一坐标差和第二坐标差,控制目标边灯从当前位置开始先后移动或者被先后移动第二距离和第三距离,以到达第一边灯的边侧预留位置,能够满足对跑道边灯和滑行道边灯中故障的第一边灯的替换需求,且目标边灯在被控制运行的过程中能够趋于横平竖直的移动,简化了控制步骤,不需要人工在跑道上运作,提升了操作的安全性,能够为飞机的进场提供助航条件。
技术特征:
1.一种飞行区助航灯智能控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的飞行区助航灯智能控制方法,其特征在于,所述根据第一边灯的数量选取目标边灯包括:
3.根据权利要求2所述的飞行区助航灯智能控制方法,其特征在于,所述根据所述单侧数量以及助航延伸方向确定每次从初始位置释放的目标边灯的数量以及先后顺序包括:
4.根据权利要求3所述的飞行区助航灯智能控制方法,其特征在于,所述方法还包括:
5.根据权利要求4所述的飞行区助航灯智能控制方法,其特征在于,所述建立中心目标边灯和非中心目标边灯之间的同步控制机制包括:
6.根据权利要求1所述的飞行区助航灯智能控制方法,其特征在于,在控制目标边灯从当前位置开始先后移动或者被先后移动第二距离和第三距离之后,所述方法还包括:
7.根据权利要求1所述的飞行区助航灯智能控制方法,其特征在于,所述设定轨道设置在跑道和滑行道外侧。
8.根据权利要求1-5任一所述的飞行区助航灯智能控制方法,其特征在于,所述方法还包括:
9.根据权利要求8所述的飞行区助航灯智能控制方法,其特征在于,所述目标边灯在第一距离中的速度大于在第二距离和第三距离中的速度。
10.一种飞行区助航灯智能控制系统,其特征在于,所述系统包括:
技术总结
本发明适用于计算机领域,提供了一种飞行区助航灯智能控制系统以及控制方法,所述方法包括:定位边灯中存在故障的第一边灯,所述边灯包括跑道边灯和/或滑行道边灯;根据第一边灯的数量选取目标边灯;控制目标边灯沿着设定轨道移动或者被移动第一距离,以使得目标边灯从初始位置到达第一边灯的平行位置的阈值距离范围内;获取第一边灯的边侧预留位置和目标边灯的当前位置之间的坐标差,所述坐标差包括第一方向的第一坐标差和垂直于第一方向的第二坐标差,所述第一方向为跑道或滑行道的方向,本申请实施例的技术方案,能够为飞机的进场提供助航条件,控制步骤较为简单。
技术研发人员:张之利,黄万里,武倩,张胤,赵晓伟,杨权应,王延晓,杨金雨,杨军,田静
受保护的技术使用者:北京京航安机场工程有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!