一种设单轴双机头结构的焊接设备的制作方法
1.本实用新型属于焊接设备的技术领域,特指一种设单轴双机头结构的焊接设备。
背景技术:
2.焊接变位机的主要作用是实现焊接过程中将工件进行翻转变位,以便获得最佳焊接位置,现市场上的焊接变位机其按结构组成分为单轴翻转变位机和双轴翻转变位机,其中单轴翻转变位机的悬臂变位主体座结构采用板材焊接制作而成,其存在制造成本高,占地面积大,不美观,笨重,且配合焊接机器人难以达到理想的焊接位置等缺陷,为解决以上存在的缺陷,本实用新型带来了一种设单轴双机头结构的焊接设备。
技术实现要素:
3.本实用新型的目的是提供一种设单轴双机头结构的焊接设备,由底座组件、两组采用单头设计的单轴伺服变位机和一组焊接机器人装置组成,单轴伺服变位机和焊接机器人装置在底座组件上端的连接位置能自由调节,其中单轴伺服电机包括采用中空形式的减速机组件和挂板,挂板同轴心连接在减速机组件前端,且分别设有过线孔,此结构能方便连接气管,地线;单轴伺服变位机能配合机器人更加有效的实现三维空间内的自由度焊接作业,是一种结构简单,美观性好,成本低、占地面积小,且能满足不同的自由度焊接位置的一种设单轴双机头结构的焊接设备。
4.一种设单轴双机头结构的焊接设备,其组成包括:底座组件、单轴伺服变位机和焊接机器人装置,其特征在于:所述底座组件前端上方连接有焊接机器人装置,后端两侧分别连接有单轴伺服变位机,所述焊接机器人装置包括底板,所述底板上方连接有立柱,所述立柱上方连接有机器人转盘组件,所述机器人转盘组件上端连接机器人,所述机器人设有焊接头;所述单轴伺服变位机包括底板,所述底板上方连接有立柱,所述立柱上方连接有减速机组件,所述减速机组件前端同轴心连接有挂板,并挂板与减速机组件同轴心设有过线孔,所述挂板前端连接有横梁。
5.优选地:所述机器人能通过机器人转盘组件在立柱上进行逆时针或顺时针的自由度旋转,所述焊接头能通过机器人实现前、后、高、低四个方向的调整和与机器人连接角度的调整。
6.优选地:所述挂板能通过减速机组件进行逆时针或顺时针的自由度旋转,所述横梁能与挂板进行不同连接位置的拆装。
7.优选地:所述减速机组件上方设有吊环。
8.优选地:所述底座组件包括基架,所述基架前后两端分别连接有基脚,所述基架上方连接有基板,所述基板与底板连接,所述底板能与基板拆装,并能自由调整安装位置。
9.优选地:所述机器人和减速机组件能与立柱拆装。
10.本实用新型相比现有技术突出且有益的技术效果是:提供一种设单轴双机头结构的焊接设备,由底座组件、两组采用单头设计的单轴伺服变位机和一组焊接机器人装置组
成,单轴伺服变位机和焊接机器人装置在底座组件上端的连接位置能自由调节,其中单轴伺服电机包括采用中空形式的减速机组件和挂板,挂板同轴心连接在减速机组件前端,且分别设有过线孔,此结构能方便连接气管,地线;单轴伺服变位机能配合机器人更加有效的实现三维空间内的自由度焊接作业,是一种结构简单,美观性好,成本低、占地面积小,且能满足不同的自由度焊接位置的一种设单轴双机头结构的焊接设备。有效的解决了现市场上的焊接变位机其按结构组成分为单轴翻转变位机和双轴翻转变位机,其中单轴翻转变位机的悬臂变位主体座结构采用板材焊接制作而成,其存在制造成本高,占地面积大,不美观,笨重,且配合焊接机器人难以达到理想的焊接位置等缺陷。
附图说明
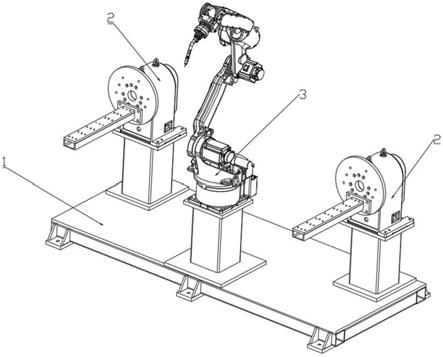
11.图1是本实用新型的整体的立体结构示意图1;
12.图2是本实用新型的整体的立体结构示意图2;
13.图3是本实用新型的剖视结构示意图;
14.图中:1-底座组件;2-单轴伺服变位机;3-焊接机器人装置;4-基板;5-基脚;6-底板;7-基架;8-机器人;9-焊接头;10-横梁;11-减速机组件;12-立柱;13-挂板;14-吊环;15-过线孔;16-机器人转盘组件;
具体实施方式
15.下面以具体实施例对本实用新型做进一步描述。
16.实施例一:如图1-图3所示:一种设单轴双机头结构的焊接设备,其组成包括:底座组件1、单轴伺服变位机2和焊接机器人装置3,所述底座组件1上方前端连接有焊接机器人装置3,后端两侧分别连接有单轴伺服变位机2,所述焊接机器人装置3包括底板6,所述底板6上方连接有立柱12,所述立柱12上方连接有机器人转盘组件16,所述机器人转盘组件16上端连接机器人8,所述机器人8设有焊接头9;所述单轴伺服变位机2包括底板6,所述底板6上方连接有立柱12,所述立柱12上方连接有减速机组件11,所述减速机组件11前端同轴心连接有挂板13,并挂板13与减速机组件11同轴心设有过线孔15,所述挂板13前端连接有横梁10。
17.可以理解地:挂板13与减速机组件11同轴心设有过线孔15,过线孔15能方便且安全的定位连接气管,地线,提升整体美观性。
18.优选地:所述机器人8能通过机器人转盘组件16在立柱12上进行逆时针或顺时针的自由度旋转,所述焊接头9能通过机器人8实现前、后、高、低四个方向的调整和与机器人8连接角度的调整。
19.可以理解地:以上结构设计,能实现焊接头9在三维空间内的自由度完成焊接作业。
20.优选地:所述挂板13能通过减速机组件11进行逆时针或顺时针的自由度旋转,所述横梁10能与挂板13进行不同连接位置的拆装。
21.可以理解地:此结构设计,能实现待焊接件按需求安装在横梁10上,并横梁10能同步与挂板13通过减速机组件11进行旋转,实现待焊接件在单轴伺服变位机2上的旋转,从而满足焊接机器人装置3对待焊接件的三维空间内的自由度焊接作业。
22.优选地:所述减速机组件11上方设有吊环14。
23.优选地:所述底座组件1包括基架7,所述基架7前后两端分别连接有基脚5,所述基架7上方连接有基板4,所述基板4与底板6连接,所述底板6能与基板7拆装,并能自由调整安装位置。
24.优选地:所述机器人8和减速机组件11能与立柱12拆装。
25.本实用新型的描述中,需要理解的是,术语“纵向”、“横向”、“长度”、“宽度”、“厚度”、“直径”“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示方位或位置关系为基准与附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
26.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种设单轴双机头结构的焊接设备,其组成包括:底座组件、单轴伺服变位机和焊接机器人装置,其特征在于:所述底座组件前端上方连接有焊接机器人装置,后端两侧分别连接有单轴伺服变位机,所述焊接机器人装置包括底板,所述底板上方连接有立柱,所述立柱上方连接有机器人转盘组件,所述机器人转盘组件上端连接机器人,所述机器人设有焊接头;所述单轴伺服变位机包括底板,所述底板上方连接有立柱,所述立柱上方连接有减速机组件,所述减速机组件前端同轴心连接有挂板,并挂板与减速机组件同轴心设有过线孔,所述挂板前端连接有横梁。2.根据权利要求1所述的一种设单轴双机头结构的焊接设备,其特征在于:所述机器人能通过机器人转盘组件在立柱上进行逆时针或顺时针的自由度旋转,所述焊接头能通过机器人实现前、后、高、低四个方向的调整和与机器人连接角度的调整。3.根据权利要求1所述的一种设单轴双机头结构的焊接设备,其特征在于:所述挂板能通过减速机组件进行逆时针或顺时针的自由度旋转,所述横梁能与挂板进行不同连接位置的拆装。4.根据权利要求1所述的一种设单轴双机头结构的焊接设备,其特征在于:所述减速机组件上方设有吊环。5.根据权利要求1所述的一种设单轴双机头结构的焊接设备,其特征在于:所述底座组件包括基架,所述基架前后两端分别连接有基脚,所述基架上方连接有基板,所述基板与底板连接,所述底板能与基板拆装,并能自由调整安装位置。6.根据权利要求1所述的一种设单轴双机头结构的焊接设备,其特征在于:所述机器人和减速机组件能与立柱拆装。
技术总结
本实用新型的目的是提供一种设单轴双机头结构的焊接设备,由底座组件、两组采用单头设计的单轴伺服变位机和一组焊接机器人装置组成,单轴伺服变位机和焊接机器人装置在底座组件上端的连接位置能自由调节,其中单轴伺服电机包括采用中空形式的减速机组件和挂板,挂板同轴心连接在减速机组件前端,且分别设有过线孔,此结构能方便连接气管,地线;单轴伺服变位机能配合机器人更加有效的实现三维空间内的自由度焊接作业,是一种结构简单,美观性好,成本低、占地面积小,且能满足不同的自由度焊接位置的一种设单轴双机头结构的焊接设备。接位置的一种设单轴双机头结构的焊接设备。接位置的一种设单轴双机头结构的焊接设备。
技术研发人员:李鹏
受保护的技术使用者:武义鸿运机电设备有限公司
技术研发日:2021.09.29
技术公布日:2022/4/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1