一种自调节夹紧程度的夹持机构、归正装置及串焊机的制作方法
本技术涉及太阳能电池,特别是涉及一种自调节夹紧程度的夹持机构、归正装置及串焊机。
背景技术:
1、太阳能电池组件生产设备中,需要将焊带和电池片的正负极串联焊接,通常会在电池片和焊带上放置压具对焊带预先进行定位,使焊带与电池片上的栅线对正后进行高温焊接,压具在电池串焊接完成后需要对其进行回收,用于循环焊接电池串,为了使压具能精准定位焊带,需要对回收的压具提前进行归正,现有技术中多采用夹持的方式对压具进行归正。
2、但由于在焊接过程中,需要将电池片与焊带进行高温焊接,压具会受热的影响使压具宽度增大,如果归正时,始终使用恒定的夹持量,压具会被过度夹持,使压具变形,或者脱离夹持,造成电池串的焊接不良的现象,也有使用压力传感器或者对驱动电机电流波动进行监控,从而获得夹持端的压力大小,但以上方法成本较高,并且在不同规格的电池片焊接时,需要更换不同宽度的压具,行业内均需要不停的人为进行调节,调节频次较多,耗时长,并且定位精度要求较高,调节难度大。
技术实现思路
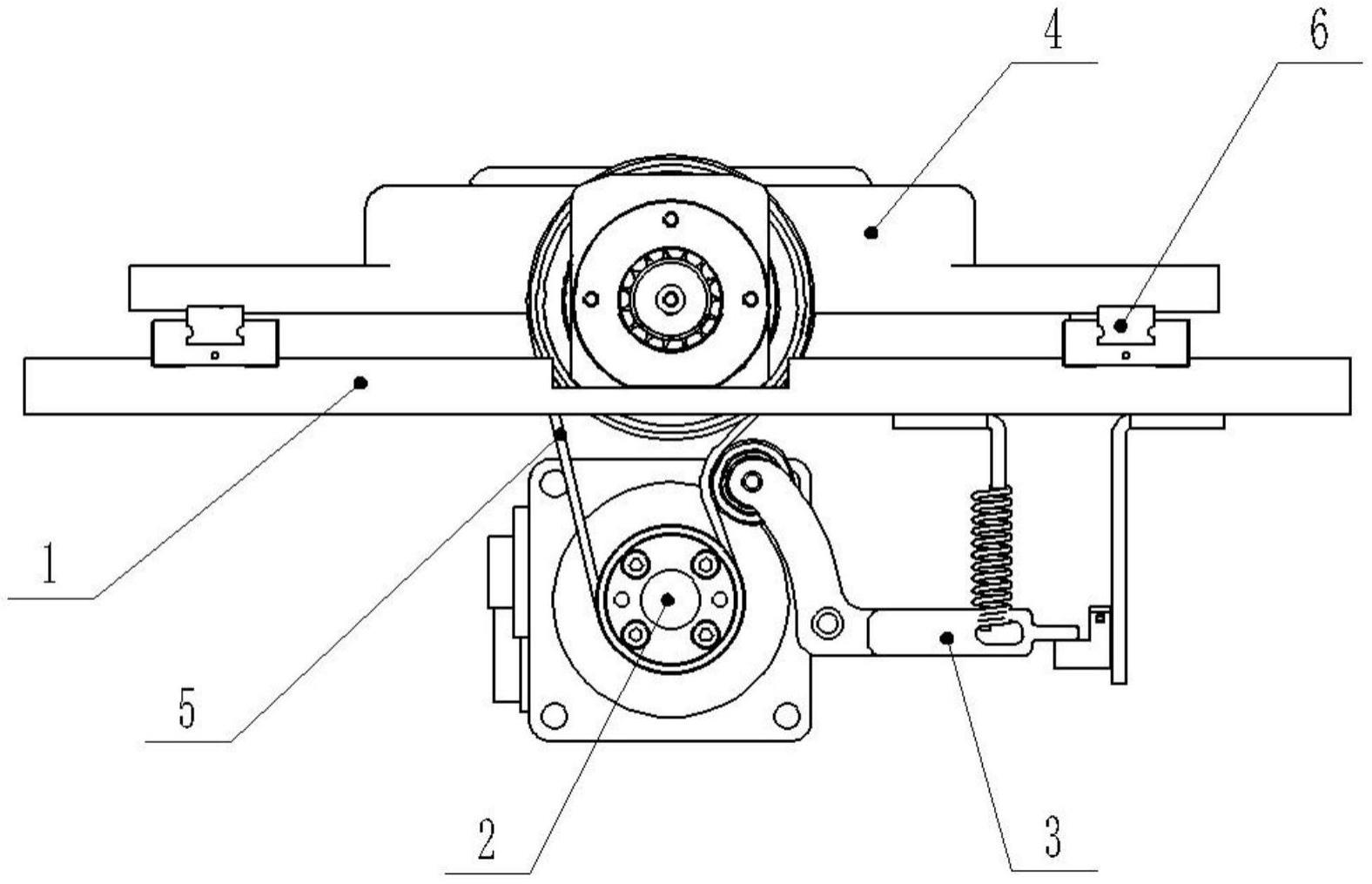
1、为解决现有技术问题,本实用新型提供了一种自调节夹紧程度的夹持机构,可以根据不同的夹持物的宽度不同,自行控制动力停止夹持,调整夹紧程度,夹持机构包括:固定座、安装在固定座上的驱动部、控制部、夹持部及滑轨,所述夹持部通过所述滑轨与所述固定座滑动连接,所述驱动部通过皮带传动以带动所述夹持部平移,所述控制部设置在所述皮带的一侧;
2、所述控制部包括压轮、连杆、第一弹簧及检测开关,所述压轮固定在所述连杆的头部,所述第一弹簧的一端与所述连杆连接,另一端与所述固定座连接,所述检测开关与所述固定座连接,用于检测所述连杆位置;
3、其中,所述压轮在所述第一弹簧的作用下与所述皮带表面相抵,所述压轮可以随着所述夹持部的夹持情况产生位置移动,使得所述连杆移动,当所述连杆的尾部到达所述检测开关的检测范围内时,所述驱动部停止驱动。
4、优选的,所述驱动部包括:驱动电机、主动轮、丝杆、螺母及从动轮,所述主动轮固定在所述驱动电机的驱动轴上,所述从动轮设在所述丝杆一端,所述主动轮与从动轮之间通过所述皮带连接,所述螺母套设在所述丝杆上,所述夹持部与螺母连接;
5、所述驱动电机带动所述从动轮和所述丝杆的转动以控制所述螺母和所述夹持部的移动位置。
6、优选的,所述压轮可以随着所述夹持部的夹持情况产生位置移动包括:
7、所述控制部还设有转轴,所述转轴固定于所述固定座,且所述转轴与所述连杆的中部铰接,所述压轮固定于所述连杆头部,所述第一弹簧的一端连接在所述转轴一侧的所述连杆的尾部,另一端与所述固定座固定,当夹持部夹持到位后,与所述压轮相抵的一侧的皮带被张紧,所述压轮绕所述转轴旋转,直至所述连杆尾部被检测机构检测到,所述驱动电机将停止转动。
8、优选的,所述压轮可以随着所述夹持部的夹持情况产生位置移动包括:
9、所述控制部还设有挡圈,所述连杆穿设在所述固定座上,所述压轮固定于所述连杆头部,所述挡圈套设在所述连杆的尾部,用于将所述连杆限位于所述固定座上,所述第一弹簧套设在所述连杆上,且所述第一弹簧的一端与所述连杆的轴肩连接,另一端与所述固定座连接,当夹持部夹持到位后,与所述压轮相抵的一侧的皮带被张紧,所述压轮沿着轴线向后平移,直至所述连杆尾部被检测机构检测到,所述驱动电机将停止转动。
10、优选的,所述压轮与连杆轴承连接。
11、优选的,所述夹持部包括:第一夹臂和第二夹臂,所述第一夹臂固定,且所述第二夹臂向所述第一夹臂端靠近;所述第二夹臂固定,且所述第一夹臂向所述第二夹臂端靠近;或所述第一夹臂和所述第二夹臂同步反向移动中任意一种;
12、其中,所述第一夹臂和所述第二夹臂同步反向移动包括:
13、所述螺母包括第一螺母和第二螺母,所述第一夹臂与所述第一螺母连接,所述第二夹臂与所述第二螺母连接,且所述第一夹臂和所述第二夹臂均水平固定在所述滑轨的移动端上,所述第一螺母和第二螺母的旋转方向相反,当所述丝杆转动时,所述第一夹臂与所述第二夹臂反向移动。
14、本实用新型还提出一种归正装置,所述归正装置包括任一所述的夹持机构,所述归正装置用于电池串焊接设备上的压具传输和归正。
15、优选的,所述传输归正装置还包括传输机构和检测机构,所述夹持机构设于所述传输机构传输方向的两侧,所述传输机构将压具传输至所述夹持机构检测机构用于检测压具是否在所述夹持机构的归正区间内。
16、优选的,所述第一夹臂上设有若干第一限位块,所述第二夹臂上设有若干第二限位块,所述第一限位块和所述第二限位块相对设置,所述第二限位块与所述第二夹臂固定连接,第一限位块与第一夹臂之间设有第二弹簧,第二弹簧套设在第一限位块的上,第二弹簧的顶部设有压板,所示压板将第一限位块和第二弹簧固定在第一夹臂上。
17、优选的,所述第一限位块和所述第二限位块的头部呈“v”形,归正压具时,与压具上的槽口相对应,提高对位精度。
18、本实用新型还提出一种串焊机,所述串焊机包括传输机构和任一所述归正装置,所述串焊机用于焊接太阳能电池片或太阳能电池串;
19、所述归正装置设于所述传输机构传输方向的两侧,所述传输机构将压具传输至所述归正装置上。
20、与现有技术相比,本实用新型提供的夹持机构,采用一个检测开关检测与皮带弹性相抵的的连杆尾部,从而检测的到皮带的张紧程度,继而控制驱动电机转动的停止,能控制夹持机构对被夹持物的力度,不过度夹持,还能保证能稳定夹持住物品,并且结构简单,设备成本低。
21、在串焊机焊接电池串时,包含夹持机构的一种归正装置,使驱动电机在归正压具时,可以适应不同规格的压具或因热变形使宽度发生变化的压具,并及时自主的停止转动,对于设备的兼容性更高,减少了人工操作时间,提升了设备的运行效率,还能有效防止压具因过大的支持力而弹出夹持区间,造成设备故障,或因压具的宽度增加而将压具夹持变形,导致不能循环使用的现象。
技术特征:
1.一种自调节夹紧程度的夹持机构,其特征在于,该夹持机构包括:固定座、安装在固定座上的驱动部、控制部、夹持部及滑轨,所述夹持部通过所述滑轨与所述固定座滑动连接,所述驱动部通过皮带传动以带动所述夹持部平移,所述控制部设置在所述皮带的一侧;
2.根据权利要求1所述的夹持机构,其特征在于,所述驱动部包括:驱动电机、主动轮、丝杆、螺母及从动轮,所述主动轮固定在所述驱动电机的驱动轴上,所述从动轮设在所述丝杆一端,所述主动轮与从动轮之间通过所述皮带连接,所述螺母套设在所述丝杆上,所述夹持部与螺母连接;
3.根据权利要求1所述的夹持机构,其特征在于,所述压轮可以随着所述夹持部的夹持情况产生位置移动包括:
4.根据权利要求1所述的夹持机构,其特征在于,所述压轮可以随着所述夹持部的夹持情况产生位置移动包括:
5.根据权利要求1所述的夹持机构,其特征在于,所述压轮与连杆之间轴承连接。
6.根据权利要求2所述的夹持机构,其特征在于,所述夹持部包括:第一夹臂和第二夹臂,所述第一夹臂固定,且所述第二夹臂向所述第一夹臂端靠近;所述第二夹臂固定,且所述第一夹臂向所述第二夹臂端靠近;或所述第一夹臂和所述第二夹臂同步反向移动中任意一种;
7.根据权利要求6所述的夹持机构,其特征在于,所述第一夹臂上设有若干第一限位块,所述第二夹臂上设有若干第二限位块,所述第一限位块和所述第二限位块相对设置,所述第二限位块与所述第二夹臂固定连接,第一限位块与第一夹臂之间设有第二弹簧,第二弹簧套设在第一限位块的上,第二弹簧的顶部设有压板,所示压板将第一限位块和第二弹簧固定在第一夹臂上。
8.根据权利要求7所述的夹持机构,其特征在于,所述第一限位块和所述第二限位块的头部呈“v”形。
9.一种归正装置,其特征在于,所述归正装置包括权利要求1-5中任一所述的夹持机构。
10.一种串焊机,其特征在于,所述串焊机包括传输机构和权利要求9所述归正装置,所述串焊机用于焊接太阳能电池片或太阳能电池串;
技术总结
本技术公开一种自调节夹紧程度的夹持机构、归正装置及串焊机,该夹持机构包括:固定座、安装在固定座上的驱动部、控制部、夹持部和滑轨,夹持部通过滑轨与固定座滑动连接,驱动部与夹持部之间通过皮带传动,控制部设置在皮带的一侧,与皮带始终弹性接触,控制部包括:压轮、连杆、转轴、第一弹簧及检测开关,在夹持部夹紧物品时,驱动部持续驱动,压轮会随着皮带的收紧绕转轴中心转动,使连杆尾部到达检测开关的检测位置,驱动部则停止驱动,即可以在夹持部已经到位的时候使驱动部及时停止,对比现有技术中,对不同宽度的物品夹持具有更高的兼容性,增大设备兼容性,还能防止被夹持物品因过大的夹持力而弹出夹持区间,或夹持变形。
技术研发人员:蒋俊杰,魏兴邦,董炜
受保护的技术使用者:江苏小牛自动化设备有限公司
技术研发日:20211228
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!