打孔组件、打孔系统及丝杆安装机器人的制作方法
本发明涉及房屋装修领域,特别涉及一种打孔组件、打孔系统及丝杆安装机器人。
背景技术:
1、在现代房屋装修过程中,通常需要在屋顶安装丝杆。在传统的屋顶丝杆安装方式中,依次需要组装丝杆、钻孔、插入丝杆、拧紧膨胀螺丝。
2、在钻孔工序,需要装修工人手持冲击钻进行钻孔作业,其中,钻孔的深度仅能依靠装修工人凭借经验观察,钻孔的进给量无法准确获知。
技术实现思路
1、本发明的主要目的是提供一种打孔组件,旨在更准确获取打孔时电钻的进给量,进而准确获知打孔深度。
2、为实现上述目的,本发明公开了一种打孔组件,包括:直线驱动器,包括直线驱动部以及直线活动部,直线活动部能够相对直线驱动部作直线运动;电钻,安装于直线活动部,电钻能够随直线活动部进给钻孔;以及孔深检测装置,孔深检测装置的至少部分结构与电钻同步进给,使得孔深检测装置能够检测电钻的进给量。
3、在本发明一些实施例中,打孔组件还包括:打孔组件安装板,直线驱动部安装于打孔组件安装板,孔深检测装置包括:钻孔进给感应片,与电钻连接,钻孔进给感应片包括沿电钻的轴向延伸的齿状结构;以及光电开关,安装于打孔组件安装板,光电开关包括发光器和收光器,齿状结构位于发光器与收光器之间的光路上。
4、在本发明一些实施例中,电钻包括转动驱动部以及钻头,转动驱动部能够驱动钻头转动,打孔组件还包括安装到位检测组件,安装到位检测组件包括:检测杆安装件,与转动驱动部连接,检测杆安装件包括第一通孔;到位检测杆,穿设于第一通孔,到位检测杆沿电钻的轴向延伸,到位检测杆包括相对的第一端和第二端,第一端用于接触打孔作业壁面;第一弹性件,将到位检测杆与检测杆安装件弹性连接;到位感应片,与第二端连接;接近传感器,安装于检测杆安装件,接近传感器被配置为在感测到到位感应片的预设位置时产生安装到位信号。
5、在本发明一些实施例中,第一弹性件为弹簧,到位检测杆的周侧设有弹簧抵接部,弹簧连接于弹簧抵接部与检测杆安装件之间。
6、在本发明一些实施例中,电钻包括转动驱动部以及钻头,转动驱动部能够驱动钻头转动,打孔组件还包括:电钻连接架,设置于转动驱动部的背离钻头一侧,并将转动驱动部与直线活动部连接;以及电钻箍筋件,环绕转动驱动部的至少部分外周设置,并将转动驱动部与直线活动部连接。
7、在本发明一些实施例中,还包括以下中的至少一者:第一电钻垫板,与转动驱动部的周面接触,并夹设于转动驱动部与直线活动部之间;第二电钻垫板,与转动驱动部的背离钻头一侧的端面接触,并夹设于转动驱动部与电钻连接架之间。
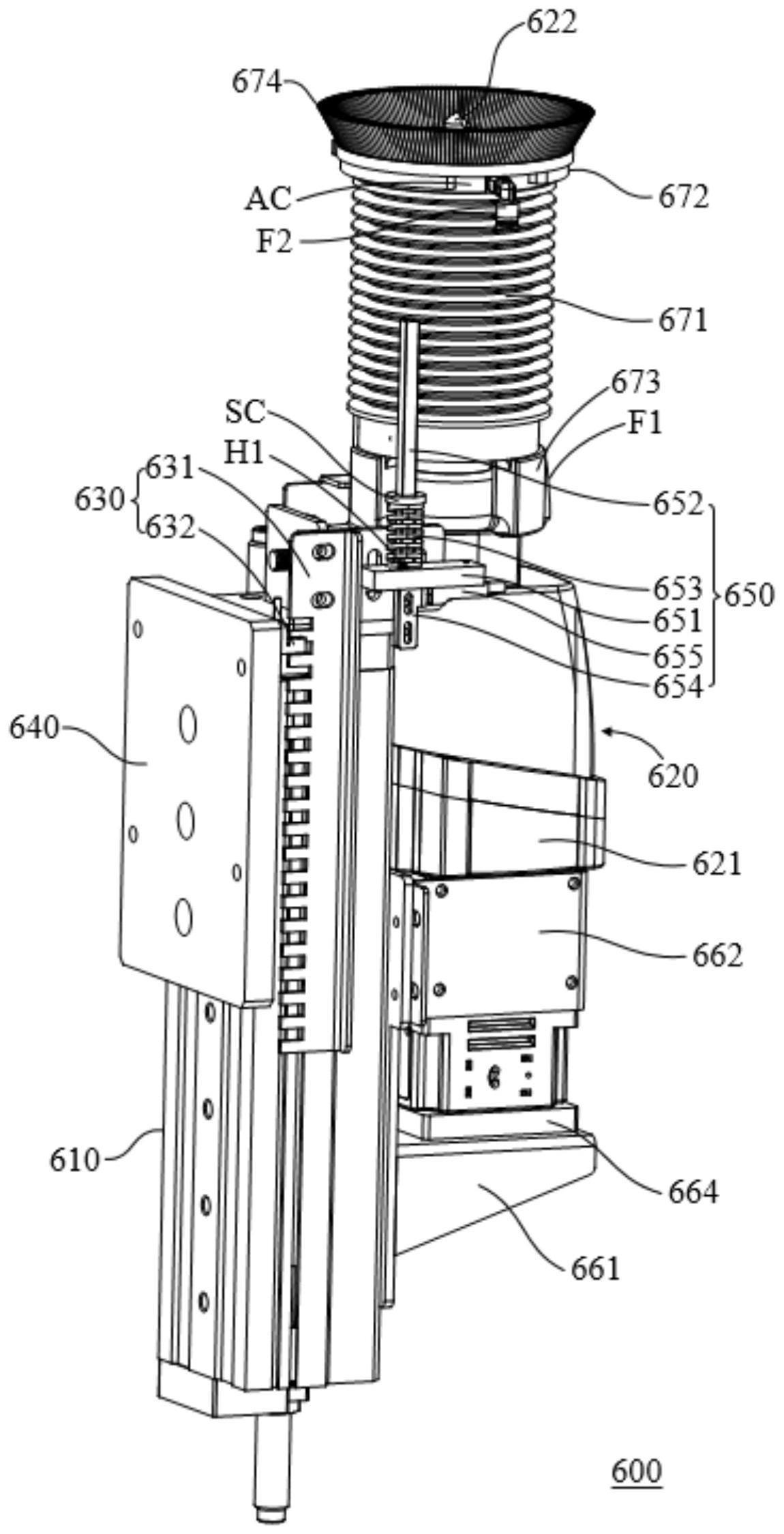
8、在本发明一些实施例中,电钻包括转动驱动部以及钻头,转动驱动部能够驱动钻头转动,打孔组件还包括:集尘管,套设于钻头外周,集尘管与钻头间隔设置,集尘管可伸缩;集尘嘴,连接于集尘管的远离转动驱动部的一端;以及吸尘漏杯,连接于集尘管的朝向转动驱动部的一端,吸尘漏杯设有气体接口,集尘管以及吸尘漏杯的内部空间经由气体接口能够连通吸尘器。
9、在本发明一些实施例中,集尘嘴设有与集尘管同轴的环状通道,设置环状通道包括气体进口以及多个气体出口,气体进口位于集尘嘴的外周,多个气体出口均布于集尘嘴的内周。
10、在本发明一些实施例中,打孔组件还包括:毛刷,环绕设置于集尘嘴。
11、在本发明一些实施例中,打孔组件还包括:导向座,与转动驱动部连接,导向座包括第二通孔;导向轴,沿电钻的轴向延伸,导向轴包括相对的第三端和第四端,第三端与集尘嘴连接,第四端穿过第二通孔;以及第二弹性件,将集尘嘴与导向座弹性连接。
12、本发明还公开一种打孔系统,其包括:平移组件,包括固定部以及作业组件安装部,作业组件安装部能够相对固定部往复直线运动;以及至少一个如前本发明任一实施例的打孔组件,每个打孔组件安装于作业组件安装部。
13、在本发明一些实施例中,打孔组件的数量为至少两个,至少两个打孔组件在往复直线运动的方向上并排设置。
14、在本发明一些实施例中,打孔系统还包括:至少一个顶柱装置,每个顶柱装置包括柱状部以及接触部,柱状部的一端与平移组件的固定部连接,柱状部的另一端与接触部连接,接触部用于抵接打孔作业壁面。
15、在本发明一些实施例中,至少一个顶柱装置还包括浮动接头,接触部通过浮动接头与柱状部连接。
16、本发明还公开一种丝杆安装机器人,其包括如前本发明任一实施例的打孔组件。
17、本发明实施例的技术方案中,通过将电钻安装于直线驱动器的直线活动部,使得直线活动部直线运动时带动电钻直线运动,从而能够进给钻孔。孔深检测装置的至少部分结构与电钻同步进给,使得孔深检测装置的至少部分结构的进给量等于电钻的进给量,因此,孔深检测装置能够更直观、准确地检测电钻的进给量。
技术特征:
1.一种打孔组件,其特征在于,包括:
2.如权利要求1所述的打孔组件,其特征在于,还包括:
3.如权利要求1所述的打孔组件,其特征在于,所述电钻包括转动驱动部以及钻头,所述转动驱动部能够驱动所述钻头转动,
4.如权利要求3所述的打孔组件,其特征在于,所述第一弹性件为弹簧,所述到位检测杆的周侧设有弹簧抵接部,所述弹簧连接于所述弹簧抵接部与所述检测杆安装件之间。
5.如权利要求1所述的打孔组件,其特征在于,所述电钻包括转动驱动部以及钻头,所述转动驱动部能够驱动所述钻头转动,
6.如权利要求5所述的打孔组件,其特征在于,还包括以下中的至少一者:
7.如权利要求1所述的打孔组件,其特征在于,所述电钻包括转动驱动部以及钻头,所述转动驱动部能够驱动所述钻头转动,
8.如权利要求7所述的打孔组件,其特征在于,所述集尘嘴设有与所述集尘管同轴的环状通道,设置环状通道包括气体进口以及多个气体出口,所述气体进口位于所述集尘嘴的外周,所述多个气体出口均布于所述集尘嘴的内周。
9.如权利要求7所述的打孔组件,其特征在于,还包括:
10.如权利要求7所述的打孔组件,其特征在于,还包括:
11.一种打孔系统,其特征在于,包括:
12.如权利要求11所述的打孔系统,其特征在于,所述打孔组件的数量为至少两个,所述至少两个打孔组件在所述往复直线运动的方向上并排设置。
13.如权利要求11所述的打孔系统,其特征在于,还包括:
14.如权利要求13所述的打孔系统,其特征在于,至少一个所述顶柱装置还包括浮动接头,所述接触部通过所述浮动接头与所述柱状部连接。
15.一种丝杆安装机器人,其特征在于,包括如权利要求1至10中任意一项所述的打孔组件。
技术总结
本发明公开一种打孔组件、打孔系统及丝杆安装机器人。打孔组件包括:直线驱动器,包括直线驱动部以及直线活动部,直线活动部能够相对直线驱动部作直线运动;电钻,安装于直线活动部,电钻能够随直线活动部进给钻孔;以及孔深检测装置,孔深检测装置的至少部分结构与电钻同步进给,使得孔深检测装置能够检测电钻的进给量。本发明实施例的技术方案中,孔深检测装置的至少部分结构与电钻同步进给,使得孔深检测装置的至少部分结构的进给量等于电钻的进给量,因此,孔深检测装置能够更直观、准确地检测电钻的进给量。
技术研发人员:蔡浩,陈卿,黄海,望扬
受保护的技术使用者:广东博智林机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!