基于3D视觉引导的引熄弧板切割系统的制作方法
基于3d视觉引导的引熄弧板切割系统
技术领域
1.本发明涉及钢管焊接切割技术领域,具体为基于3d视觉引导的引熄弧板切割系统。
背景技术:
2.专利号cn202010131717.5,公开了一种钢管引熄弧板切割装置,包括安装在地面上的安全围栏,所述安全围栏的前后两端分别安装多个输送辊,所述安全围栏外安装弧板切割装置电控柜和设备总操作台,所述安全围栏内的地面上设有地坑,所述地坑内安装弧板收集装置,所述地坑旁边的地面上安装弧板切割装置,所述弧板切割装置与弧板切割装置电控柜电气连接,所述弧板切割装置一侧设有吸尘装置,所述安全围栏内还设有用于定位钢管两端端头位置的定位系统;所述设备总操作台分别与弧板切割装置电控柜、弧板收集装置、吸尘装置和定位系统电连接。本发明的有益效果是,自动化定位切割,大大降低了工作难度,提高了工作效率,提升了企业的市场竞争力。
3.但是,现有的钢管引熄弧板切割装置,在使用过程中,只能够自动化定位切割,无法彻底全自动无人化,自动识别和自动切割,并且切割的轨迹不能自动计算,自动调节切割的轨迹。
技术实现要素:
4.本发明的目的在于提供基于3d视觉引导的引熄弧板切割系统,解决了背景技术中所提出的问题。
5.为实现上述目的,本发明提供如下技术方案:基于3d视觉引导的引熄弧板切割系统,包括3d视觉系统支撑架、机械手底座和废料斗,所述3d视觉系统支撑架顶部安装有3d视觉系统,所述机械手底座顶部螺栓连接有机械手,所述机械手左侧螺栓连接有等离子切割头。
6.作为本发明的一种优选实施方式,所述废料斗顶部贴合有除尘吸风口,所述除尘吸风口顶部左侧放置有带引熄弧板钢管。
7.作为本发明的一种优选实施方式,所述机械手底座顶部左侧螺栓连接有管端定位传感器。
8.作为本发明的一种优选实施方式,所述3d视觉系统由3d结构光相机和光学投射器组成。
9.作为本发明的一种优选实施方式,。
10.与现有技术相比,本发明的有益效果如下:1.本发明通过设置3d视觉系统,可以全自动无人化,自动识别,自动切割,并且对3d视觉系统再开发,引入更有效的控制模块,比上一代点激光技术更加高效快速,切割轨迹自动计算,同时可以人工添加需要的特殊轨迹,可开发性强,不仅如此,对不同管径的钢管,不同长度大小的引熄弧板自适应,适用范围广。
11.2.本发明由于设置有机械手,在机械手上可定制更多制具,完成引熄弧板切割,切割前清扫,切割后修磨等更多其他附属功能。
12.3.本发明能够自动动态调整废料斗,保证弧板掉落更均匀,不会持续同一位置积压。
附图说明
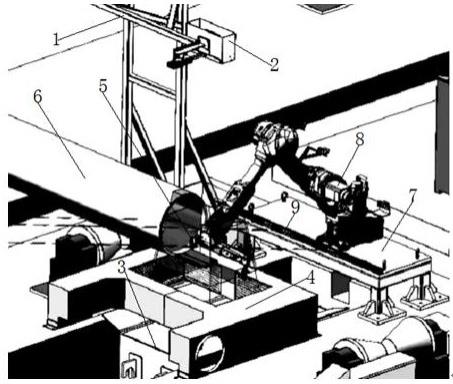
13.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:图1为本发明基于3d视觉引导的引熄弧板切割系统的整体结构示意图。
14.图中:1、3d视觉系统支撑架;2、3d视觉系统;3、废料斗;4、除尘吸风口;5、等离子切割头;6、带引熄弧板钢管;7、机械手底座;8、机械手;9、管端定位传感器。
具体实施方式
15.请参阅图1,本发明提供一种技术方案:基于3d视觉引导的引熄弧板切割系统,包括3d视觉系统支撑架1、机械手底座7和废料斗3,所述3d视觉系统支撑架1顶部安装有3d视觉系统2,所述机械手底座7顶部螺栓连接有机械手8,所述机械手8左侧螺栓连接有等离子切割头5。
16.本实施例中请参阅图1,所述废料斗3顶部贴合有除尘吸风口4,所述除尘吸风口4顶部左侧放置有带引熄弧板钢管6。
17.本实施例中请参阅图1,所述机械手8底座顶部左侧螺栓连接有管端定位传感器9。
18.本实施例中请参阅图1,所述3d视觉系统2由3d结构光相机和光学投射器组成。
19.在基于3d视觉引导的引熄弧板切割系统使用的时候,步骤一:辊道将钢管输送至引弧板切割工位上,传感器进行钢管定位;步骤二:3d视觉系统扫描,获取引弧板位置数据,计算出切割轨迹,将轨迹数据发送给机械手,机械手带动等离子枪头至切割起点位置,点火开始切割作业,完成引弧板切割;步骤三:切割后的引弧板掉落至接料斗里,3d视觉系统再对管端进行二次检测,弧板如果正常掉落就可进行下一工序,否则重复上述切割步骤;步骤四:辊道将钢管输送至熄弧板切割工位上,传感器进行钢管定位。
20.步骤五:重复步骤二和步骤三动作,完成熄弧板自动切割,完成后辊道将钢管输送至下一工序。
21.需要说明的是,本发明为基于3d视觉引导的引熄弧板切割系统,包括1、3d视觉系统支撑架;2、3d视觉系统;3、废料斗;4、除尘吸风口;5、等离子切割头;6、带引熄弧板钢管;7、机械手底座;8、机械手;9、管端定位传感器,部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
技术特征:
1.基于3d视觉引导的引熄弧板切割系统,包括3d视觉系统支撑架(1)、机械手底座(7)和废料斗(3),其特征在于:所述3d视觉系统支撑架(1)顶部安装有3d视觉系统(2),所述机械手底座(7)顶部螺栓连接有机械手(8),所述机械手(8)左侧螺栓连接有等离子切割头(5)。2.根据权利要求1所述的基于3d视觉引导的引熄弧板切割系统,其特征在于:所述废料斗(3)顶部贴合有除尘吸风口(4),所述除尘吸风口(4)顶部左侧放置有带引熄弧板钢管(6)。3.根据权利要求1所述的基于3d视觉引导的引熄弧板切割系统,其特征在于:所述机械手(8)底座顶部左侧螺栓连接有管端定位传感器(9)。4.根据权利要求1所述的基于3d视觉引导的引熄弧板切割系统,其特征在于:所述3d视觉系统(2)由3d结构光相机和光学投射器组成。
技术总结
本发明涉及钢管焊接切割技术领域,公开了基于3D视觉引导的引熄弧板切割系统,包括3D视觉系统支撑架、机械手底座和废料斗,所述3D视觉系统支撑架顶部安装有3D视觉系统,所述机械手底座顶部螺栓连接有机械手,所述机械手左侧螺栓连接有等离子切割头,所述废料斗顶部贴合有除尘吸风口,所述除尘吸风口顶部左侧放置有带引熄弧板钢管。本发明通过设置3D视觉系统,可以全自动无人化,自动识别,自动切割,并且对3D视觉系统再开发,引入更有效的控制模块,比上一代点激光技术更加高效快速,切割轨迹自动计算,同时可以人工添加需要的特殊轨迹,可开发性强,不仅如此,对不同管径的钢管,不同长度大小的引熄弧板自适应,适用范围广。适用范围广。适用范围广。
技术研发人员:房宇 杨润 马利祥 李孝志 杨啸 刘相辰 李杉 洪航宇 马谦
受保护的技术使用者:巨龙钢管有限公司
技术研发日:2022.06.27
技术公布日:2022/9/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1