一种用于自动组合螺钉和平垫并锁紧的机构的制作方法
本发明涉及拧螺钉设备,尤其涉及一种用于自动组合螺钉和平垫并锁紧的机构。
背景技术:
1、螺钉作为常见的物料,在工业生产中具备及其广泛的应用。在工业生产中,为防止螺钉松动,保护机器表面,螺钉一般配合平垫使用。随着科技的发展和自动化程度的提高,打螺钉这一反复操作的工作也逐渐由自动化替代手工劳动,但是,目前依然为手动劳动为主。对于现有的自动打螺钉设备,具有自动拧螺钉设备及螺钉与垫片自动组合的穿垫设备,但是,这些设备相互独立,无法完整的完成螺钉和平垫组合至拧螺钉这一整个过程。
技术实现思路
1、本发明针对现有技术的不足,提供一种用于自动组合螺钉和平垫并锁紧的机构。
2、本发明通过以下技术手段实现解决上述技术问题的:
3、一种用于自动组合螺钉和平垫并锁紧的机构,包括:
4、组合装置,用于将螺钉和平垫组合在一起;
5、视觉定位装置,设置于组合装置的一侧,用于识别工件位置信息;
6、工业机器人,设置于视觉定位装置的一侧,所述工业机器人上设置有打螺钉装置,用于夹取和平垫组合后的螺钉,并拧紧在工件上。
7、作为上述技术方案的改进,所述的一种用于自动组合螺钉和平垫并锁紧的机构,所述工业机器人上具有机械臂;所述打螺钉装置设置于机械臂远离工业机器人的一端;所述打螺钉装置包括电批、真空吸盘以及磁铁;所述真空吸盘设置于电批的端部,用于吸附组装后的螺钉;所述磁铁设置于真空吸盘上,用于吸附组装后的螺钉上的垫片。
8、作为上述技术方案的改进,所述的一种用于自动组合螺钉和平垫并锁紧的机构,所述电批上具有扭力传感器。
9、作为上述技术方案的改进,所述的一种用于自动组合螺钉和平垫并锁紧的机构,所述视觉定位装置包括工业相机、安装架、气缸以及底架;所述气缸为两个且都竖直设置于底架上;所述安装架的一端和其中一个气缸铰接,所述安装架靠近中部位置和另一个气缸铰接;所述工业相机设置于安装架的非铰接端。
10、作为上述技术方案的改进,所述的一种用于自动组合螺钉和平垫并锁紧的机构,用于自动组合螺钉和平垫并锁紧的机构还包括围栏;所述围栏围设在组合装置、视觉定位装置以及工业机器人的外部。
11、本发明的优点在于:通过工业机器人与组合装置结合,自动完成螺钉的整个拧紧过程,操作人员只需要将螺钉和平垫送入螺钉和平垫组合装置内,整个设备即可完成螺钉和平垫组合至拧紧在工件上等一系列操作,自动化程度高,降低人工劳动量,节省人力成本,通过视觉定位装置定位,可兼容多种不同工件。
12、进一步,该机构附带力矩反馈机构,保证螺丝紧固到位,防止螺丝过紧对工件造成损伤。
技术特征:
1.一种用于自动组合螺钉和平垫并锁紧的机构,其特征在于:包括:
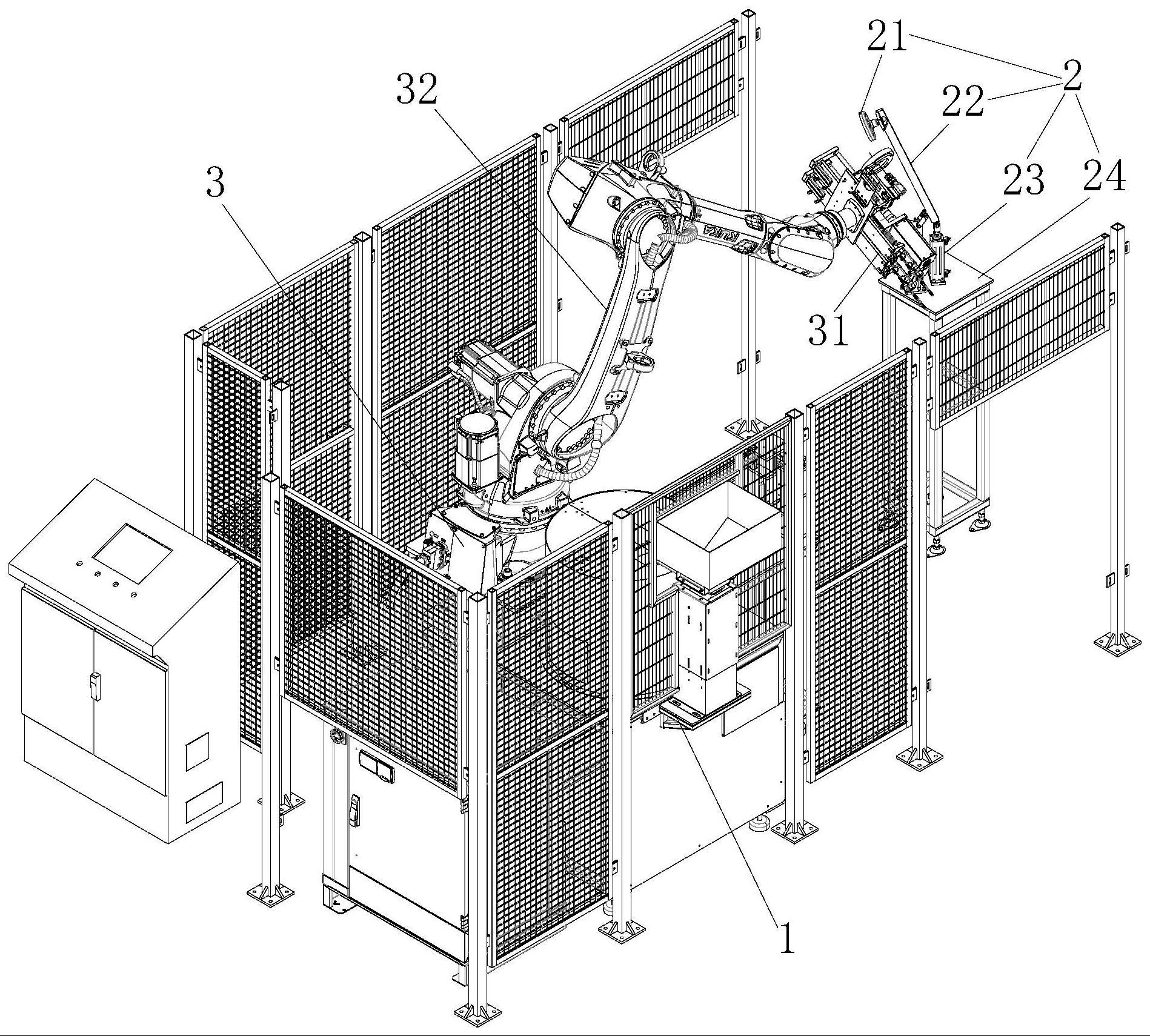
2.根据权利要求1所述的一种用于自动组合螺钉和平垫并锁紧的机构,其特征在于:所述工业机器人(3)上具有机械臂(32);所述打螺钉装置(31)设置于机械臂(32)远离工业机器人(3)的一端;所述打螺钉装置(31)包括电批(311)、真空吸盘(312)以及磁铁(313);所述真空吸盘(312)设置于电批(311)的端部,用于吸附组装后的螺钉;所述磁铁(313)设置于真空吸盘(312)上,用于吸附组装后的螺钉上的垫片。
3.根据权利要求2所述的一种用于自动组合螺钉和平垫并锁紧的机构,其特征在于:所述电批(311)上具有扭力传感器。
4.根据权利要求1所述的一种用于自动组合螺钉和平垫并锁紧的机构,其特征在于:所述视觉定位装置(2)包括工业相机(21)、安装架(22)、气缸(23)以及底架(24);所述气缸(23)为两个且都竖直设置于底架(24)上;所述安装架(22)的一端和其中一个气缸(23)铰接,所述安装架(22)靠近中部位置和另一个气缸(23)铰接;所述工业相机(21)设置于安装架(22)的非铰接端。
5.根据权利要求1所述的一种用于自动组合螺钉和平垫并锁紧的机构,其特征在于:用于自动组合螺钉和平垫并锁紧的机构还包括围栏(4);所述围栏(4)围设在组合装置(1)、视觉定位装置(2)以及工业机器人(3)的外部。
技术总结
本发明涉及拧螺钉设备技术领域,尤其涉及一种用于自动组合螺钉和平垫并锁紧的机构,包括:组合装置,用于将螺钉和平垫组合在一起;视觉定位装置,设置于组合装置的一侧,用于识别工件位置信息;工业机器人,设置于视觉定位装置的一侧,所述工业机器人上设置有打螺钉装置,用于夹取和平垫组合后的螺钉,并拧紧在工件上。通过工业机器人与组合装置结合,自动完成螺钉的整个拧紧过程,操作人员只需要将螺钉和平垫送入螺钉和平垫组合装置内,整个设备即可完成螺钉和平垫组合至拧紧在工件上等一系列操作,自动化程度高,降低人工劳动量,节省人力成本,通过视觉定位装置定位,可兼容多种不同工件。
技术研发人员:薛和芬,钱勇,王震
受保护的技术使用者:安徽集萃智造机器人科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!