一种带机械手的螺丝锁附设备的制作方法
1.本实用新型涉及螺丝锁附领域,尤指一种带机械手的螺丝锁附设备。
背景技术:
2.目前市面上的转盘螺丝机,大部分是下面两种方式:
3.1、单点转盘螺丝机:由凸轮分割器转盘配合一个气缸下压z轴组成,由于没有xy轴部分,所以每次作业只能做一颗螺丝,只适合产品只有一颗螺丝时使用,或者一个产品分多次锁附,局限性很大。而且这个方式不能完成取螺丝动作,只适合吹气式锁附,对于不能使用吹气料仓的螺丝,则无法使用。
4.2、多点转盘螺丝机:由凸轮分割器转盘配合一个气缸下压z轴组成,z轴上挂2把或多把电批,每次可同时锁附多颗螺丝。
5.缺点:
6.1、对于螺丝比较靠近的,间距太小的情况,无法适用。
7.2、灵活性不高,制作完后基本只适用最初设计的产品,不方便切换产品。
8.3、不能完成取螺丝动作,只适合吹气式锁附,对于不能使用吹气料仓的螺丝,则无法使用。
技术实现要素:
9.为解决上述问题,本实用新型提供一种带机械手的螺丝锁附设备,其目的在于解决仅适于吹气式锁附以及设置多个电批面临间距过小导致无法正常使用的问题。
10.为实现上述目的,本实用新型采用的技术方案是:一种带机械手的螺丝锁附设备,其特征在于,包括有旋转台、锁附机构以及下料机构,旋转台上有多个固定夹具,固定夹具用于对产品进行定位,锁附机构包括有三轴运动平台和电批,电批随动于三轴运动平台的活动端,在固定夹具上方移动,由下料机构将固定夹具转移到下一个工序中。
11.本实用新型的有益效果在于:
12.采用了三轴运动平台,该三轴运动平台,可以提供x轴、y轴、z轴的三个运动方向,如此一来,电批在三轴运动平台的带动下,获得了多个活动区域,相较于现有技术,就不用受限于单轴运动导致锁附方式仅限于吹气式,也就是说,因为电批获得了多个方向移动的特点,使之获得了使用吸附式的充分条件,由此可知,解决了使用方式单一的问题,同样的,在具备多个方向移动的特点后,则不需要采用多个单轴方向移动的电批,对于,采用多个单轴方向电批引起间隙过小的情况也得以解决;
13.至于下料机构是为了使设备具有下料的功能,使设备更加智能化,减少不必要的劳动力。
附图说明
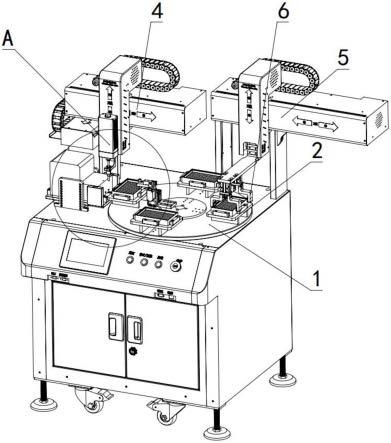
14.图1是本实用新型的结构图。
15.图2是a处放大示意图。
16.图3是三轴运动平台的结构图。
17.附图标号说明:1-旋转台;2-固定夹具;21-螺丝盘;22-锁边;23-底板;3-电批;4-三轴运动平台;41-第一横向移动机构;42-第二横向移动机构;
18.43-第一纵向移动机构;5-两轴运动平台;51-第三横向移动机构;
19.52-第二纵向移动机构;6-夹爪气缸;8-气缸压条;9-压紧气缸;
20.11-连接片;12-压杆;13-传感器;15-支撑块;16-电批嘴。
具体实施方式
21.请参阅图1-3所示,本实用新型关于一种带机械手的螺丝锁附设备,具有一个单独的
22.一种带机械手的螺丝锁附设备,其特征在于,包括有旋转台1、锁附机构以及下料机构,旋转台1上有多个固定夹具2,固定夹具2用于对产品进行定位,锁附机构包括有三轴运动平台4和电批3,电批3随动于三轴运动平台4的活动端,在固定夹具2上方移动,由下料机构将固定夹具2转移到下一个工序中。
23.该带机械手的螺丝锁附设备采用了三轴运动平台4,该三轴运动平台4,可以提供x轴、y轴、z轴的三个运动方向,如此一来,电批3在三轴运动平台4的带动下,获得了多个活动区域,相较于现有技术,就不用受限于单轴运动导致锁附方式仅限于吹气式,也就是说,因为电批3获得了多个方向移动的特点,使之获得了使用吸附式的充分条件,由此可知,解决了使用方式单一的问题,同样的,在具备多个方向移动的特点后,则不需要采用多个单轴方向移动的电批3,对于,采用多个单轴方向电批3引起间隙过小的情况也得以解决;
24.三轴运动平台4包括有第一横向移动机构41、第二横向移动机构42、第一纵向移动机构43,第二横向移动机构42设置在第一横向移动机构41的活动端上,第一纵向移动机构43设置在第二横向移动机构42的活动端上,电批3固定在第一纵向移动机构43的活动端上。
25.两轴运动平台5包括有第三横向移动机构51、第二纵向移动机构52,第二纵向移动机构52设置在第三横向移动机构51上,夹爪气缸6固定在第二纵向移动机构52的活动端上。
26.进一步地,旋转台上有对固定夹具2进行定位的压紧部件,该压紧部件是为了对产品进行定位,工件的上有定位孔,具体地,压紧部件包括有气缸压条8,所述气缸压条8是纵向对产品下压;
27.所述压紧部件还包括有压紧气缸9和设置在压紧气缸9活塞杆上的铰接件,所述铰接件包括有杠杆座、连接片11和压杆12,杠杆座固定在压紧气缸9上,并通过连接片11与压杆12的中间区域连接,压紧气缸9的活塞杆与压杆12的一端连接,气缸压条8与压杆12的另一端连接,如此一来,压紧气缸9的行程通过铰接件使气缸压条8具备了弧形运动的轨迹范围,压紧气缸9复位后,气缸压条8位于固定夹具2外,由旋转台旋转到下料机构上。
28.需要说明的是,旋转台上还设有对应固定夹具2的传感器13,该传感器13用于感应固定夹具2上的产品,以此确认旋转台是否继续转动。
29.至于下料机构是为了使设备具有下料的功能,使设备更加智能化,减少不必要的劳动力。
30.进一步地,下料机构包括有两轴运动平台5和设置在两轴运动平台5活动端上的夹
爪气缸6,夹爪气缸6的夹持端上设有缓冲垫,由夹爪气缸6将固定夹具2搬移到另一个工位上。
31.进一步地,所述固定夹具2包括有螺丝盘21、锁边22以及底板23,螺丝盘21、锁边22设置在底板23上,锁边22与每个螺丝盘21的部分侧面相抵;旋转台上设有支撑块15,底板23设置在支撑块15上,同时,锁边22用于限制螺丝盘21,使螺丝盘21位于指定位置。
32.进一步地,还包括有电批嘴16,电批3具有可被电批嘴16穿过的批头,并且电批嘴16上有连通其内部的通道,该通道用于连接抽真空装置;以上为吸附式锁附方式,将电批嘴16移动到螺丝供料器上,通过抽真空装置将电批嘴16内的空间抽干,使螺丝进入到通道内,并与电批3头对应,再通过三轴运动平台4,在到达产品上后,电批3旋转,螺丝拧入到产品上。
33.以上实施方式仅仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通工程技术人员对本实用新型的技术方案作出的各种变形和改进,均应落入本实用新型的权利要求书确定的保护范围内。
技术特征:
1.一种带机械手的螺丝锁附设备,其特征在于,包括有旋转台、锁附机构以及下料机构,旋转台上有多个固定夹具,固定夹具用于对产品进行定位,锁附机构包括有三轴运动平台和电批,电批随动于三轴运动平台的活动端,在固定夹具上方移动,由下料机构将固定夹具转移到下一个工序中。2.根据权利要求1所述的一种带机械手的螺丝锁附设备,其特征在于,旋转台上有使产品限制在固定夹具上的压紧部件。3.根据权利要求2所述的一种带机械手的螺丝锁附设备,其特征在于,所压紧部件包括有气缸压条。4.根据权利要求1所述的一种带机械手的螺丝锁附设备,其特征在于,下料机构包括有两轴运动平台和设置在两轴运动平台活动端上的夹爪气缸,夹爪气缸的夹持端上设有缓冲垫。5.根据权利要求1所述的一种带机械手的螺丝锁附设备,其特征在于,旋转台上还设有对应固定夹具的传感器。6.根据权利要求3所述的一种带机械手的螺丝锁附设备,其特征在于,所述压紧部件包括有压紧气缸和设置在压紧气缸活塞杆上的铰接件,所述铰接件包括有杠杆座、连接片和压杆,杠杆座固定在压紧气缸上,并通过连接片与压杆的中间区域连接,压紧气缸的活塞杆与压杆的一端连接,气缸压条与压杆的另一端连接。7.根据权利要求1所述的一种带机械手的螺丝锁附设备,其特征在于,所述三轴运动平台包括有第一横向移动机构、第二横向移动机构、第一纵向移动机构,第二横向移动机构设置在第一横向移动机构的活动端上,第一纵向移动机构设置在第二横向移动机构的活动端上,电批固定在第一纵向移动机构的活动端上。8.根据权利要求1所述的一种带机械手的螺丝锁附设备,其特征在于,所述两轴运动平台包括有第三横向移动机构、第二纵向移动机构,第二纵向移动机构设置在第三横向移动机构上,夹爪气缸固定在第二纵向移动机构的活动端上。9.根据权利要求3所述的一种带机械手的螺丝锁附设备,其特征在于,所述固定夹具包括有螺丝盘、锁边以及底板,螺丝盘、锁边设置在底板上,锁边与每个螺丝盘的部分侧面相抵。10.根据权利要求1所述的一种带机械手的螺丝锁附设备,其特征在于,还包括有电批嘴,电批具有可被电批嘴穿过的批头,并且电批嘴上有连通其内部的通道,该通道用于连接抽真空装置。
技术总结
本实用新型涉及螺丝锁附领域,尤指一种带机械手的螺丝锁附设备,采用了三轴运动平台,该三轴运动平台,可以提供X轴、Y轴、Z轴的三个运动方向,如此一来,电批在三轴运动平台的带动下,获得了多个活动区域,相较于现有技术,就不用受限于单轴运动导致锁附方式仅限于吹气式,也就是说,因为电批获得了多个方向移动的特点,使之获得了使用吸附式的充分条件,由此可知,解决了使用方式单一的问题,同样的,在具备多个方向移动的特点后,则不需要采用多个单轴方向移动的电批,对于,采用多个单轴方向电批引起间隙过小的情况也得以解决;至于下料机构是为了使设备具有下料的功能,使设备更加智能化,减少不必要的劳动力。减少不必要的劳动力。减少不必要的劳动力。
技术研发人员:陈亮
受保护的技术使用者:东莞市铭赛智能科技有限公司
技术研发日:2022.09.02
技术公布日:2022/12/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1