一种机床自动上下料机器人及其末端执行器的制作方法
本发明涉及工业机器人,具体而言,为一种机床自动上下料机器人及其末端执行器。
背景技术:
1、机床自动上下料机器人及其末端执行器指的是任何一个连接在机器人边缘(关节)具有一定功能的工具。机床自动上下料机器人是将加工件精确地放入机床指定位置,加工完成后能将加工件从该位置取出。机床加工零件形式多样,普通的二爪抓手只能抓取特定形态物体,故需要增加工件托盘联轴器,与抓取机构配合使用。机床加工时产生铁屑和冷却液,对机器人作业环境产生极大影响,需要及时对机器人的作业环境进行清洁处理。机器人在抓取时无法保证机床状态,需要对抓取处进行检测。
2、因此,亟需一种能够解决上述问题的机床自动上下料机器人及其末端执行器。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种机床自动上下料机器人及其末端执行器,能够检测机床状态,清理工件铁屑,将工件取出/放入机床,具有自动化程度高、上下料效率高、过程稳定的特点。
2、为达到上述目的,本发明提供如下技术方案:
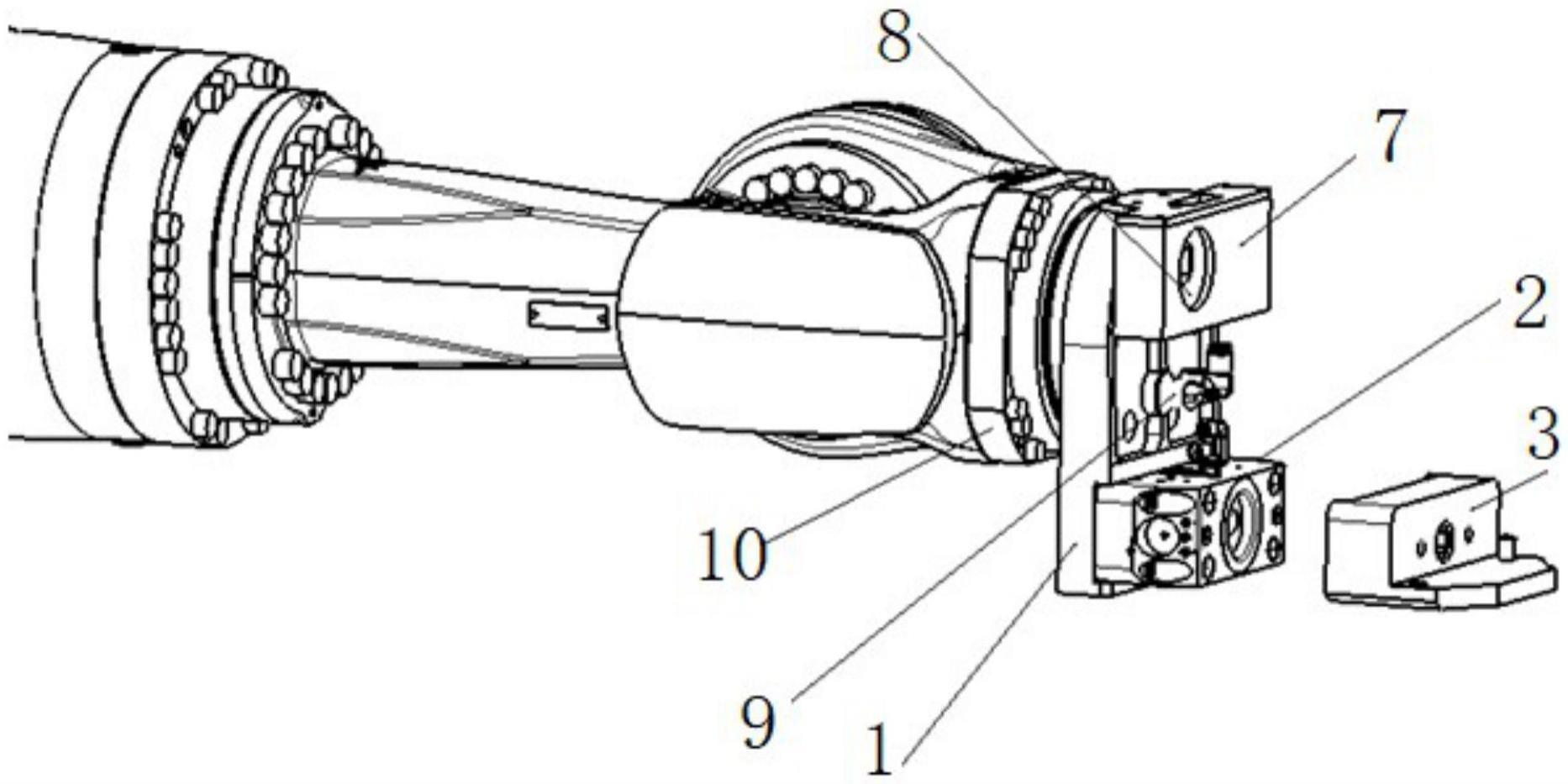
3、本发明首先提出了一种机器人末端执行器,包括用于抓取工件的抓取机构,还包括分别用于检测所述抓取机构锁紧和打开的第一接近传感器和第二接近传感器,所述抓取机构上方还设有用于检测是否存在工件的第三接近传感器;
4、还包括吹气机构和用于检测机床状态的检测机构,所述检测机构包括检测相机,所述吹气机构上设有吹气口。
5、进一步,还包括执行器连接法兰,所述抓取机构、检测机构和吹气机构均设置在所述执行器连接法兰上。
6、进一步,所述检测机构还包括相机支架,所述相机支架设置在所述连执行器接法兰上,所述检测相机设置在所述相机支架上。
7、进一步,所述连接法兰上环形均布设有用于与机器人末端法兰连接的安装孔。
8、进一步,所述吹气机构与所述连接法兰螺纹连接。
9、进一步,所述吹气口设置在所述抓取机构和所述检测机构之间。
10、进一步,所述检测相机外设有镜头防护罩。
11、进一步,还包括与所述抓取机构配合使用的托盘联轴器。
12、本发明还提出了一种机床自动上下料机器人,包括如上任一项所述的机器人末端执行器。
13、进一步,所述机器人端部设有机器人连接法兰,所述机器人末端执行器通过所述机器人连接法兰安装在所述机器人上。
14、本发明的有益效果在于:
15、本发明的机床自动上下料机器人及其末端执行器,通过抓取机构与第一接近传感器、第二接近传感器、第三接近传感器和检测机构的配合使用,工作时,能够检测机床以及抓取机构的状态,并通过吹气机构能将工件上的铁屑清除,提升作业精度,还能够将工件取出/放入机床,具有自动化程度高、上下料效率高、过程稳定的特点。
16、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:
1.一种机器人末端执行器,其特征在于:包括用于抓取工件的抓取机构,还包括分别用于检测所述抓取机构锁紧和打开的第一接近传感器和第二接近传感器,所述抓取机构上方还设有用于检测是否存在工件的第三接近传感器;
2.根据权利要求1所述的机器人末端执行器,其特征在于:还包括执行器连接法兰,所述抓取机构、检测机构和吹气机构均设置在所述执行器连接法兰上。
3.根据权利要求2所述的机器人末端执行器,其特征在于:所述检测机构还包括相机支架,所述相机支架设置在所述执行器连接法兰上,所述检测相机设置在所述相机支架上。
4.根据权利要求2所述的机器人末端执行器,其特征在于:所述执行器连接法兰上环形均布设有用于与机器人末端连接法兰连接的安装孔。
5.根据权利要求2所述的机器人末端执行器,其特征在于:所述吹气机构与所述连接法兰螺纹连接。
6.根据权利要求1所述的机器人末端执行器,其特征在于:所述吹气口设置在所述抓取机构和所述检测机构之间。
7.根据权利要求1所述的机器人末端执行器,其特征在于:所述检测相机外设有镜头防护罩。
8.根据权利要求1所述的机器人末端执行器,其特征在于:还包括与所述抓取机构配合使用的托盘联轴器。
9.一种机床自动上下料机器人,其特征在于:包括如权利要求1-8任一项所述的机器人末端执行器。
10.根据权利要求9所述的机床自动上下料机器人,其特征在于:所述机器人端部设有机器人连接法兰,所述机器人末端执行器通过所述机器人连接法兰安装在所述机器人上。
技术总结
本发明首先提出了一种机器人末端执行器,包括用于抓取工件的抓取机构,还包括分别用于检测所述抓取机构锁紧和打开的第一接近传感器和第二接近传感器,所述抓取机构上方还设有第三接近传感器;还包括吹气机构和检测机构,所述检测机构包括检测相机,所述吹气机构上设有吹气口。本发明还提出了一种机床自动上下料机器人,包括如上所述的机器人末端执行器。通过抓取机构与第一接近传感器、第二接近传感器、第三接近传感器和检测机构的配合使用,工作时,能够检测机床以及抓取机构的状态,并通过吹气机构能将工件上的铁屑清除,提升作业精度,还能够将工件取出/放入机床,具有自动化程度高、上下料效率高、过程稳定的特点。
技术研发人员:熊曦耀,倪冬,南周学,方强
受保护的技术使用者:江西昌河航空工业有限公司
技术研发日:20220926
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!