一种机器人激光焊接、切割实训台的制作方法
本技术涉及工业实训台领域,具体为一种机器人激光焊接、切割实训台。
背景技术:
1、前中国工业机器人的数量迎来爆发式增长,广泛应用在汽车制造、金属制品、电器机械等各个领域,企业对能够完成工业机器人编程、操作、维修的应用型技术人才需求迫切。当前国内的工业机器人技术培训仍处于普及阶段,针对性的实践教学装置匮乏,在无法进行工厂实地培训的情况下,大多数采用仿真模式开展培训,影响学习效果。
2、工业机器人定义为“其操作机是自动控制的,可重复编程、多用途,并可以对3个以上轴进行编程。它可以是固定式或者移动式。在工业自动化应用中使用”。操作机又定义为“是一种机器,其机构通常由一系列相互铰接或相对滑动的构件所组成。
3、现有技术,在利用实训台进行仿真培训时,是通过工业机器人实现焊接和切割的,由于工业机器人有多个自由度,当工业机器人手臂停留在半空中,使用者误触工业机器人开关,使焊接和切割设备单独工作,会导致发生事故风险可能性增大的问题。
4、基于此,本实用新型设计了一种机器人激光焊接、切割实训台,以解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种机器人激光焊接、切割实训台,以解决上述背景技术中提出了现有技术,当工业机器人手臂停留在半空中,使用者误触工业机器人开关,使焊接和切割设备单独工作,会导致发生事故风险可能性增大的问题。
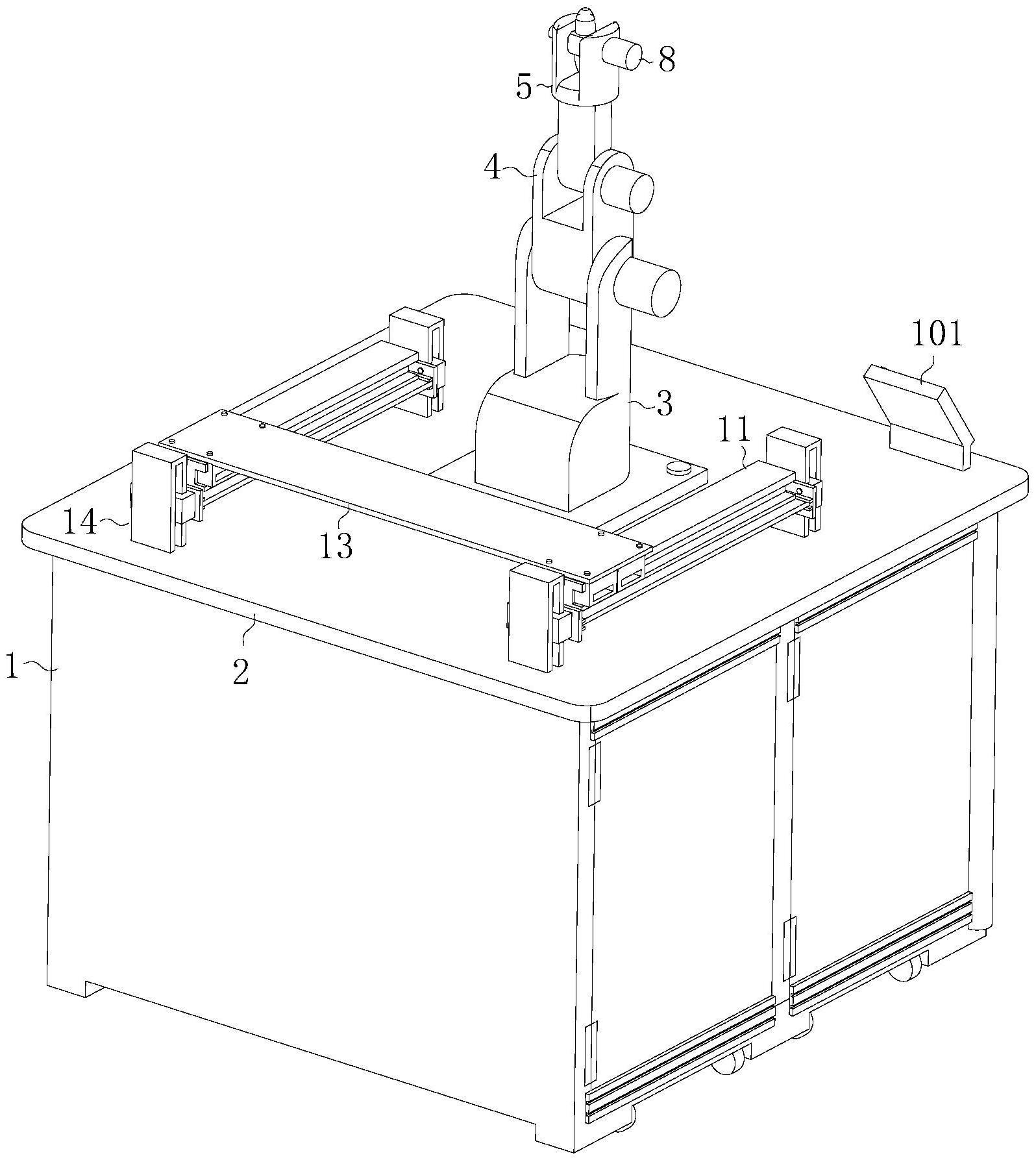
2、为实现上述目的,本实用新型提供如下技术方案:一种机器人激光焊接、切割实训台,包括实训桌和控制面板,所述实训桌顶端固定连接有操作台,所述操作台顶端设置有工业机器人,包括机器控制台、第一机器手臂、第二机器手臂和第三机器手臂;
3、所述机器控制台固定连接在操作台顶端,所述第一机器手臂转动连接在机器控制台顶端,所述第二机器手臂转动连接在第一机器手臂顶端,所述第三机器手臂转动连接在第二机器手臂顶端;
4、所述第一机器手臂、第二机器手臂和第三机器手臂转动轴端部均设置有角度传感器,所述角度传感器分别固定连接在机器控制台、第一机器手臂和第二机器手臂外侧壁上,数个所述角度传感器相互关联,所述角度传感器均与控制面板采用无线数据传输的方式进行通信连接;
5、所述第一机器手臂、第二机器手臂和第三机器手臂的转动轴另一端部均传动连接有翻转电机,所述翻转电机分别固定连接在机器控制台、第一机器手臂和第二机器手臂外侧壁上,所述翻转电机与控制面板电连接。
6、优选的,所述第三机器手臂顶端和底端分别设置有激光焊接器和激光切割器,所述激光焊接器和激光切割器分别与控制面板电连接。
7、优选的,所述操作台顶端对称设置有横向导轨,所述横向导轨顶端滑动连接有横向紧锁滑块,两个所述横向紧锁滑块顶端共同固定连接有操作板。
8、优选的,每个所述横向导轨两端均设置有纵向导轨,所述纵向导轨固定连接在操作台顶端,所述纵向导轨表面滑动均滑动连接有纵向紧锁滑块,两个所述纵向紧锁滑块端部共同固定连接有固定板,所述固定板固定连接在横向导轨底端。
9、优选的,所述操作面板固定连接在操作台顶端,并位于工业机器人背面。
10、优选的,所述实训桌底端转动连接有多个支撑轮。
11、与现有技术相比,本实用新型的有益效果是:
12、1、本实用新型通过设置角度传感器,分别测得多个机器手臂的转动轴的旋转角度,通过无线数据传输的方式将数据传输至控制面板中,并分析第三机器手臂与操作台之间的夹角,当第三机器手臂与操作台之间夹角在0~90度之间时,可以通过控制面板开启激光焊接器和激光切割器,当第三机器手臂与操作台之间夹角超过90度时,激光焊接器和激光切割器与控制面板之间电路断开,且无法通过控制面板开启激光焊接器和激光切割器,同时将控制面板设置在工业机器人背面,远离焊接切割处,从而降低发生事故风险可能性,提高对使用者的保护。
13、2、本实用新型通过设置横向导轨和纵向导轨,通过控制面板控制横向紧锁滑块和纵向紧锁滑块,分别调节操作板的距离激光焊接器和激光切割器的高度和水平距离,便于焊接和切割不同尺寸大小的工件。
技术特征:
1.一种机器人激光焊接、切割实训台,包括实训桌(1)和控制面板(101),其特征在于:所述实训桌(1)顶端固定连接有操作台(2),所述操作台(2)顶端设置有工业机器人,包括机器控制台(3)、第一机器手臂(4)、第二机器手臂(5)和第三机器手臂(6);
2.根据权利要求1所述的一种机器人激光焊接、切割实训台,其特征在于:所述第三机器手臂(6)顶端和底端分别设置有激光焊接器(9)和激光切割器(10),所述激光焊接器(9)和激光切割器(10)分别与控制面板(101)电连接。
3.根据权利要求2所述的一种机器人激光焊接、切割实训台,其特征在于:所述操作台(2)顶端对称设置有横向导轨(11),所述横向导轨(11)顶端滑动连接有横向紧锁滑块(12),两个所述横向紧锁滑块(12)顶端共同固定连接有操作板(13)。
4.根据权利要求3所述的一种机器人激光焊接、切割实训台,其特征在于:每个所述横向导轨(11)两端均设置有纵向导轨(14),所述纵向导轨(14)固定连接在操作台(2)顶端,所述纵向导轨(14)表面滑动均滑动连接有纵向紧锁滑块(15),两个所述纵向紧锁滑块(15)端部共同固定连接有固定板(16),所述固定板(16)固定连接在横向导轨(11)底端。
5.根据权利要求1所述的一种机器人激光焊接、切割实训台,其特征在于:操作面板固定连接在操作台(2)顶端,并位于工业机器人背面。
6.根据权利要求1所述的一种机器人激光焊接、切割实训台,其特征在于:所述实训桌(1)底端转动连接有多个支撑轮(17)。
技术总结
本技术涉及工业实训台领域,具体为一种机器人激光焊接、切割实训台,包括实训桌和控制面板,所述实训桌顶端固定连接有操作台,所述操作台顶端设置有工业机器人。本技术通过设置角度传感器,分别测得多个轴的旋转角度,通过控制面板分析第三机器手臂与操作台之间的夹角,当第三机器手臂与操作台之间夹角在0~90度之间时,可以通过控制面板开启激光焊接器和激光切割器,当第三机器手臂与操作台之间夹角超过90度时,激光焊接器和激光切割器与控制面板之间电路断开,且无法通过控制面板开启激光焊接器和激光切割器,同时将控制面板设置在工业机器人背面,远离焊接切割处,从而降低发生事故风险可能性,提高对使用者的保护。
技术研发人员:吴乐平,陈挺,黄敦华,尹立明,李静
受保护的技术使用者:南京旭上数控技术有限公司
技术研发日:20221028
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!