焊接工装装卸装置的制作方法
本技术涉及焊接,尤其涉及一种焊接工装装卸装置。
背景技术:
1、选择焊为采用工装将工件焊点周边区域遮蔽的一种焊接方式,传统的选择焊焊接过程中,需要采用操作人员采用手动方式将焊接工装与需要焊接的工件进行组装并贴合,比如将pcba(printed circuit board assembly印刷电路板组装)与开设有多个焊接口的工装进行贴合,将pcba焊点周边区域进行遮蔽,在焊接完毕后,再将工装与工件进行人工拆卸,操作人员在组装并贴合工件与工装或拆卸工件与工装的过程中,易损坏工件,并且采用人工进行装拆导致操作人员劳动强度大、工作效率低。
2、鉴于此,有必要提供一种新的焊接工装装卸装置,以解决或至少缓解上述技术缺陷。
技术实现思路
1、本实用新型的主要目的是提供一种焊接工装装卸装置,旨在解决现有技术中工装与工件需要人工进行装拆的技术问题。
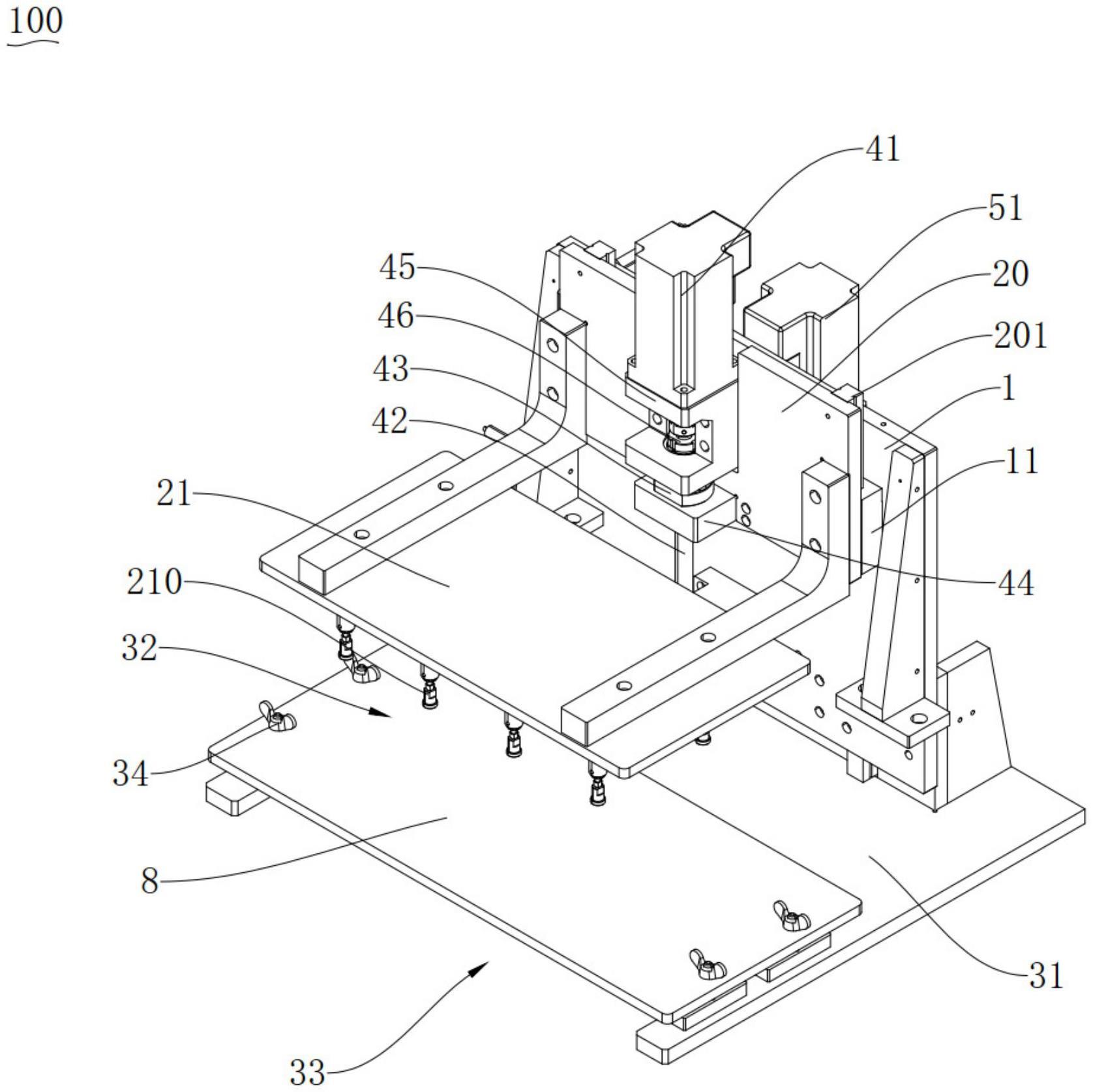
2、为实现上述目的,根据本实用新型的一个方面,本实用新型提供一种焊接工装装卸装置,包括固定板、第一压紧机构、第二压紧机构和驱动机构,所述第一压紧机构包括相互连接的第一滑动板和第一压紧板,所述第一滑动板可滑动地安装于所述固定板;所述第二压紧机构包括相互连接的第二滑动板和第二压紧板,所述第二滑动板可滑动地安装于所述固定板,所述第一压紧板和所述第二压紧板上下相对设置并形成放置空间,所述第二压紧板用于支撑所述放置空间内的工装,所述第二压紧板对应工装的位置形成用于对所述工件进行焊接的避让口;所述驱动机构用于驱动所述第一滑动板和所述第二滑动板对所述固定板相向运动,以使所述第一压紧板和第二压紧板相配合,以将通过外部输送设备送至所述放置空间内的工件与所述工装贴合,或所述驱动机构用于驱动所述第一滑动板和所述第二滑动板对所述固定板向背运动,使所述工件与所述工装脱离。
3、在一实施例中,所述驱动机构包括第一驱动件、第一丝杆、第一连接块和套设于所述第一丝杆外并与所述第一丝杆螺纹配合的第一滚珠螺母,所述第一丝杆沿竖向穿设于所述第一连接块,第一连接块与所述第一滚珠螺母连接,且所述第一连接块连接所述第一滑动板,所述第一驱动件的输出轴与所述第一丝杆连接,所述第一驱动件用于驱动所述第一丝杆转动,以使所述第一丝杆螺母和所述第一连接块带动所述第一滑动板相对所述固定板上下移动。
4、在一实施例中,所述驱动机构包括第二驱动件、第二丝杆、第二连接块和套设于所述第二丝杆外并与所述第二丝杆螺纹配合的第二滚珠螺母,所述第二丝杆沿竖向穿设于所述第二连接块,第二连接块与所述第二滚珠螺母连接,且所述第二连接块连接所述第二滑动板,所述第二驱动件的输出轴与所述第二丝杆连接,所述第二驱动件用于驱动所述第二丝杆转动,以使所述第二丝杆螺母和所述第二连接块带动所述第二滑动板相对所述固定板上下移动。
5、在一实施例中,所述固定板的相背两侧分别设置有沿竖向延伸的第一滑轨和第二滑轨,第一滑动板与固定板与第一滑轨同侧设置,且具有与所述第一滑轨滑动配合的第一滑块,所述第二滑动板与第二滑轨同侧设置,且具有与所述第二滑轨滑动配合的第二滑块。
6、在一实施例中,所述驱动机构还包括第一安装座和第二安装座,所述第一安装座和所述第二安装座均安装于所述固定板,所述第一驱动件安装于所述第一安装座,所述第二驱动件安装于所述第二安装座。
7、在一实施例中,所述第一安装座设置于所述第一驱动件下方,所述第一安装座沿竖向形成第一过孔,所述第一驱动件的输出轴和所述第一丝杆均伸入所述第一过孔内且相互连接;所述第二安装座设置于所述第二驱动件下方,所述第二安装座沿竖向形成第二过孔,所述第二驱动件的输出轴和所述第二丝杆均伸入所述第二过孔内且相互连接。
8、在一实施例中,所述第一驱动件的输出轴与所述第一丝杆通过第一联轴器连接,所述第二驱动件的输出轴与所述第二丝杆通过第二联轴器连接。
9、在一实施例中,所述焊接工装装卸装置还包括多个第一传感器和多个第二传感器,多个所述第一传感器和多个所述第二传感器均沿竖向间隔安装于所述固定板,所述第一滑动板安装有用于感应所述第一传感器的第一感应块,所述第二滑动板安装有用于感应所述第二传感器的第二感应块。
10、在一实施例中,所述第一压紧板的底部设置有压针组件,所述压针组件包括多个压针,所述压针用于与所述工件抵接。
11、在一实施例中,所述第二压紧机构还包括多个定位柱,多个所述定位柱间隔安装于所述第二压紧板,所述工装开设有用于供所述定位柱插入的定位孔。
12、在一实施例中,第二压紧机构还包括多个定位柱,多个所述定位柱间隔安装于所述第二压紧板,所述工装开设有用于供所述定位柱插入的定位孔。
13、上述方案中,第一压紧板和第二压紧板上下间隔设置,通过将工装放置于第二压紧板上方,当工件移动至放置空间内时,驱动机构驱动第一滑动板和第二滑动板相对固定板相向运动,以使第一滑动板带动第一压紧板移动,第二滑动板带动第二压紧板移动,从而使得第一压紧板和第二压紧板相向移动,使得第一压紧板与工件的上侧抵接,第一压紧板与工件的上侧抵接,能够防止第二压紧板带动工装与工件相抵接并贴合的过程中,工装推动工件向上移动。第二压紧板开设有与放置空间连通的避让口,避让口与放置空间连通,使得焊接生产线的焊接设备能穿过该避让口对工件进行焊接操作,当工件焊接完毕后,驱动机构驱动第一滑动板和第二滑动板相对固定板相背移动,以使第一滑动板带动第一压紧板移动,第二滑动板带动第二压紧板移动,从而使得第一压紧板和第二压紧板相背移动,使得第一压紧板与工件脱离抵接,第二压紧板带动工装与工件脱离,实现了工件与工装的自动贴合于拆卸操作,自动化程度高,适用于大批量生产,无需操作人员将工件与工装进行手动贴合并拆卸,符合人机工程,降低了操作人员的劳动负担。
技术特征:
1.一种焊接工装装卸装置,其特征在于,包括:
2.如权利要求1所述的焊接工装装卸装置,其特征在于,所述驱动机构包括第一驱动件、第一丝杆、第一连接块和套设于所述第一丝杆外并与所述第一丝杆螺纹配合的第一滚珠螺母,所述第一丝杆沿竖向穿设于所述第一连接块,第一连接块与所述第一滚珠螺母连接,且所述第一连接块连接所述第一滑动板,所述第一驱动件的输出轴与所述第一丝杆连接,所述第一驱动件用于驱动所述第一丝杆转动,以使所述第一丝杆螺母和所述第一连接块带动所述第一滑动板相对所述固定板上下移动。
3.如权利要求2所述的焊接工装装卸装置,其特征在于,所述驱动机构包括第二驱动件、第二丝杆、第二连接块和套设于所述第二丝杆外并与所述第二丝杆螺纹配合的第二滚珠螺母,所述第二丝杆沿竖向穿设于所述第二连接块,第二连接块与所述第二滚珠螺母连接,且所述第二连接块连接所述第二滑动板,所述第二驱动件的输出轴与所述第二丝杆连接,所述第二驱动件用于驱动所述第二丝杆转动,以使所述第二丝杆螺母和所述第二连接块带动所述第二滑动板相对所述固定板上下移动。
4.如权利要求3所述的焊接工装装卸装置,其特征在于,所述固定板的相背两侧分别设置有沿竖向延伸的第一滑轨和第二滑轨,第一滑动板与固定板与第一滑轨同侧设置,且具有与所述第一滑轨滑动配合的第一滑块,所述第二滑动板与第二滑轨同侧设置,且具有与所述第二滑轨滑动配合的第二滑块。
5.如权利要求3所述的焊接工装装卸装置,其特征在于,所述驱动机构还包括第一安装座和第二安装座,所述第一安装座和所述第二安装座均安装于所述固定板,所述第一驱动件安装于所述第一安装座,所述第二驱动件安装于所述第二安装座。
6.如权利要求5所述的焊接工装装卸装置,其特征在于,所述第一安装座设置于所述第一驱动件下方,所述第一安装座沿竖向形成第一过孔,所述第一驱动件的输出轴和所述第一丝杆均伸入所述第一过孔内且相互连接;所述第二安装座设置于所述第二驱动件下方,所述第二安装座沿竖向形成第二过孔,所述第二驱动件的输出轴和所述第二丝杆均伸入所述第二过孔内且相互连接。
7.如权利要求6所述的焊接工装装卸装置,其特征在于,所述第一驱动件的输出轴与所述第一丝杆通过第一联轴器连接,所述第二驱动件的输出轴与所述第二丝杆通过第二联轴器连接。
8.如权利要求1~7中任一项所述的焊接工装装卸装置,其特征在于,所述焊接工装装卸装置还包括多个第一传感器和多个第二传感器,多个所述第一传感器和多个所述第二传感器均沿竖向间隔安装于所述固定板,所述第一滑动板安装有用于感应所述第一传感器的第一感应块,所述第二滑动板安装有用于感应所述第二传感器的第二感应块。
9.如权利要求1~7中任一项所述的焊接工装装卸装置,其特征在于,所述第一压紧板的底部设置有压针组件,所述压针组件包括多个压针,所述压针用于与所述工件抵接。
10.如权利要求1~7中任一项所述的焊接工装装卸装置,其特征在于,所述第二压紧机构还包括多个定位柱,多个所述定位柱间隔安装于所述第二压紧板,所述工装开设有用于供所述定位柱插入的定位孔。
技术总结
本技术提供一种焊接工装装卸装置,其包括固定板、第一压紧机构、第二压紧机构和驱动机构;第一压紧机构包括相互连接的第一滑动板和第一压紧板,第二压紧机构包括相互连接的第二滑动板和第二压紧板,第一压紧板和第二压紧板形成放置空间,第二压紧板用于支撑工装,第二压紧板开设有与放置空间连通的避让口;驱动机构用于驱动第一滑动板和第二滑动板对固定板相向运动,以使第一压紧板和第二压紧板相配合,以将通过外部输送设备送至放置空间内的工件与工装贴合,或驱动机构用于驱动第一滑动板和第二滑动板对固定板向背运动,使工件与工装脱离,本技术的焊接工装装卸装置。本技术无需人工进行工件及工装安装与拆卸,增加了工作效率。
技术研发人员:张平,师智文,司苏贤,郭伟伟
受保护的技术使用者:苏州汇川联合动力系统有限公司
技术研发日:20221104
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!