一种电阻点焊用柔性臂焊枪的制作方法
本技术涉及电阻点焊,具体地说是一种电阻点焊用柔性臂焊枪。
背景技术:
1、汽车制造过程中主要连接工艺是电阻点焊,电阻点焊是指利用电流通过焊件及接触处产生的电阻热作为热源将焊件局部加热,同时加压进行焊接的方法。电流及 压力的产生时通过电阻焊枪来实现的,因而焊枪是电阻点焊必不可少的一部分。但是由于焊枪在设计制作过程中需要考虑机器人的负载和生产维修成本,使得焊枪的尺寸和结构受到约束。
2、随着汽车工业的发展,高度自动化、集成化,同时从经济性角度出发,汽车主机厂或零配件产品生产时共一个平台或共一条产线,这样的设计生产理念成为发展的主流。在共平台或共生产线时,由于产品结构差异,导致焊枪结构与产品相冲突,导致焊枪不能满足要求,从而需要更换焊枪来实现不同产品的点焊焊接。
3、针对上述情况,目前常规的方法是通过换枪盘来实现焊枪的更换,但是存在以下问题:1、换枪盘结构复杂,价格相对较高,在产线中投入多个换枪盘,提高了生产成本。2、换枪盘结构复杂,使用过程中容易出现故障,同时换枪盘的维修对维修人员的技能要求较高,而且维修过程会带来长时间的停机,影响生产效率。3、换枪盘重量较重,对机器人负载要求较高,需要采用负载更大的机器人设备。
技术实现思路
1、本实用新型为克服现有技术的不足,提供一种电阻点焊用柔性臂焊枪。
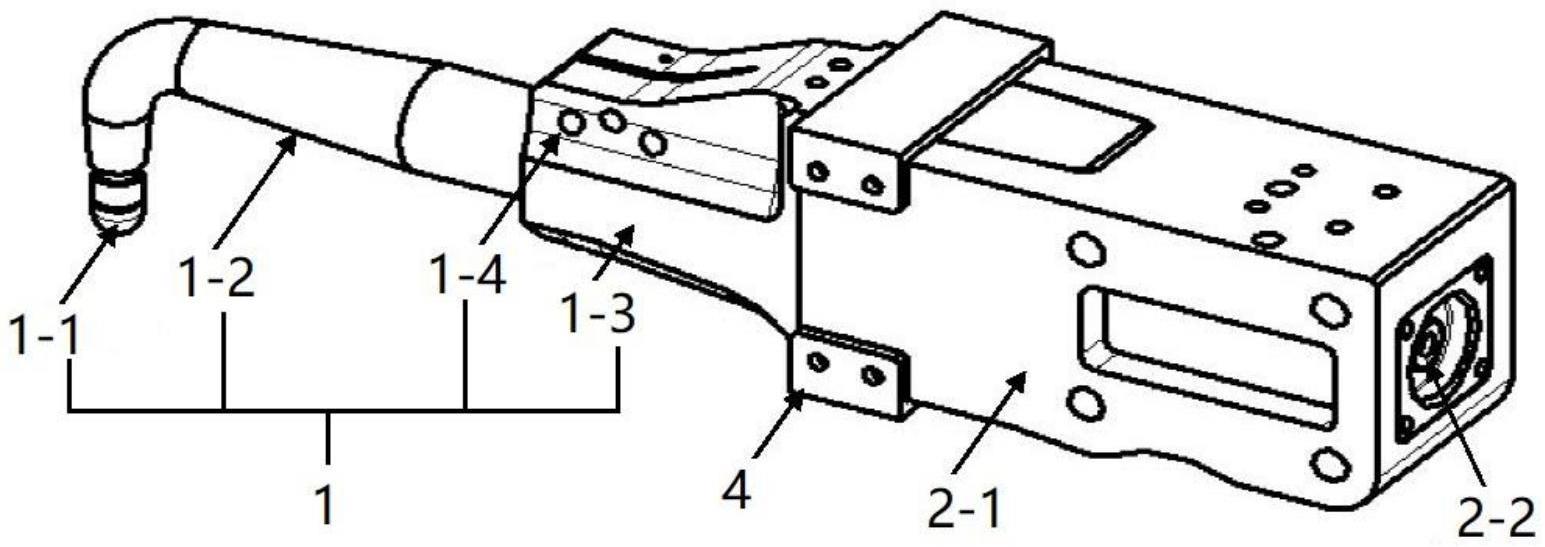
2、为实现上述目的,设计一种电阻点焊用柔性臂焊枪,包括焊枪部,其特征在于:所述的焊枪部后端连接固定部,所述的固定部包括固定部壳体、钩形件,所述的焊枪部后端外侧套设固定部壳体,并通过固定杆连接,固定杆一侧设有钩形件一端,钩形件的另一端通过转接杆连接驱动结构。
3、所述的驱动结构包括传动杆、气缸,转接杆一端连接传动杆的一端,传动杆的另一端连接气缸。
4、所述的固定部壳体内设有气缸安装槽。
5、所述的焊枪部包括电极帽、电极接杆、连接块,位于固定部壳体前端连接连接块一端,连接块另一端连接电极接杆一端,电极接杆另一端连接电极帽。
6、所述的连接块一侧设有螺纹安装孔,连接块与电极接杆之间通过螺栓固定。
7、所述的焊枪部后端设有左右方向贯穿的固定杆安装孔一,位于固定部壳体前端设有与固定杆安装孔一相配合的固定杆安装孔二,固定杆插入固定杆安装孔一、固定杆安装孔二内将连接块与固定部壳体相连接。
8、所述的焊枪部与固定部壳体连接处的上下两端分别设有连接固定板。
9、所述的焊枪部后侧上部的结构为楔形结构。
10、本实用新型同现有技术相比,结构简单,通过固定部代替结构复杂的换枪盘,配合不同焊枪使用,满足生产需求,使用便利。
技术特征:
1.一种电阻点焊用柔性臂焊枪,包括焊枪部,其特征在于:所述的焊枪部(1)后端连接固定部(2),所述的固定部(2)包括固定部壳体(2-1)、钩形件(2-3),所述的焊枪部(1)后端外侧套设固定部壳体(2-1),并通过固定杆(3)连接,固定杆(3)一侧设有钩形件(2-3)一端,钩形件(2-3)的另一端通过转接杆(2-4)连接驱动结构。
2.根据权利要求1所述的一种电阻点焊用柔性臂焊枪,其特征在于:所述的驱动结构包括传动杆(2-5)、气缸(2-2),转接杆(2-4)一端连接传动杆(2-5)的一端,传动杆(2-5)的另一端连接气缸(2-2)。
3.根据权利要求1所述的一种电阻点焊用柔性臂焊枪,其特征在于:所述的固定部壳体(2-1)内设有气缸安装槽(2-7)。
4.根据权利要求1所述的一种电阻点焊用柔性臂焊枪,其特征在于:所述的焊枪部(1)包括电极帽(1-1)、电极接杆(1-2)、连接块(1-3),位于固定部壳体(2-1)前端连接连接块(1-3)一端,连接块(1-3)另一端连接电极接杆(1-2)一端,电极接杆(1-2)另一端连接电极帽(1-1)。
5.根据权利要求4所述的一种电阻点焊用柔性臂焊枪,其特征在于:所述的连接块(1-3)一侧设有螺纹安装孔(1-4),连接块(1-3)与电极接杆(1-2)之间通过螺栓固定。
6.根据权利要求1或4所述的一种电阻点焊用柔性臂焊枪,其特征在于:所述的焊枪部(1)后端设有左右方向贯穿的固定杆安装孔一(1-5),位于固定部壳体(2-1)前端设有与固定杆安装孔一(1-5)相配合的固定杆安装孔二(2-8),固定杆(3)插入固定杆安装孔一(1-5)、固定杆安装孔二(2-8)内将连接块(1-3)与固定部壳体(2-1)相连接。
7.根据权利要求1或4所述的一种电阻点焊用柔性臂焊枪,其特征在于:所述的焊枪部(1)与固定部壳体(2-1)连接处的上下两端分别设有连接固定板(4)。
8.根据权利要求1或4所述的一种电阻点焊用柔性臂焊枪,其特征在于:所述的焊枪部(1)后侧上部的结构为楔形结构。
技术总结
本技术涉及电阻点焊技术领域,具体地说是一种电阻点焊用柔性臂焊枪。一种电阻点焊用柔性臂焊枪,包括焊枪部,其特征在于:所述的焊枪部后端连接固定部,所述的固定部包括固定部壳体、钩形件,所述的焊枪部后端外侧套设固定部壳体,并通过固定杆连接,固定杆一侧设有钩形件一端,钩形件的另一端通过转接杆连接驱动结构。同现有技术相比,结构简单,通过固定部代替结构复杂的换枪盘,配合不同焊枪使用,满足生产需求,使用便利。
技术研发人员:肖望,孙智敏,李江江,刘政君
受保护的技术使用者:华域汽车车身零件(上海)有限公司
技术研发日:20221108
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!