多工位多轴变位焊接机的制作方法
本技术涉及焊接,特别涉及一种多工位多轴变位焊接机。
背景技术:
1、焊接,也称作熔接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术,现有焊接机在焊接工件时为避免产生焊接死角,需要频繁更换焊接位置,加大了操作人员的劳动强度,降低了焊接精度。
2、因此,有必要提出一种多工位多轴变位焊接机用于解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种多工位多轴变位焊接机,以解决上述背景技术中提出的问题。
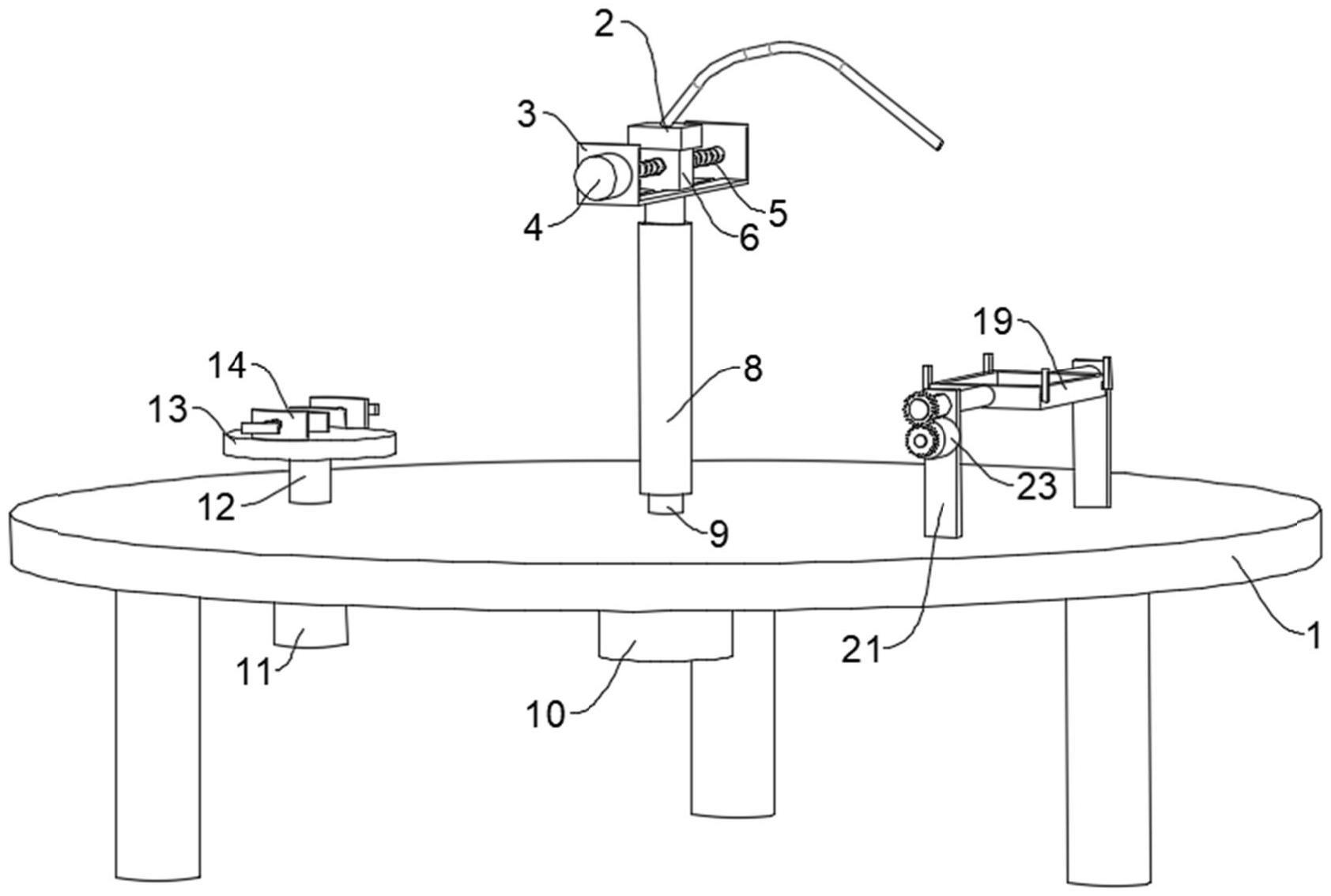
2、为实现上述目的,本实用新型提供如下技术方案:一种多工位多轴变位焊接机,包括底座,所述底座的上方设置有焊接机器人,所述底座的上方还设置有带动焊接机器人横向移动的驱动机构,所述驱动机构包括u型架、第一电机、丝杠、滑块和滑槽,所述第一电机固定连接在u型架的外部,所述丝杠固定连接在第一电机的驱动轴上,所述滑槽开设在u型架朝向丝杠的一面上,丝杠和滑槽均沿着u型架的长度方向分布,所述滑块朝向滑槽的一面固定连接有凸块,所述凸块与滑槽吻合,所述滑块上开设有与丝杠配合的螺纹孔,所述焊接机器人固定连接在滑块的顶部。
3、优选的,所述u型架下表面的中部固定连接有气缸,所述气缸的底部固定连接有第一转轴,所述第一转轴转动连接在底座的中部,所述底座的下表面固定连接有第二电机,所述第二电机的驱动轴固定连接在第一转轴上。
4、优选的,所述气缸的一侧设置有圆盘,所述圆盘的上表面设置有两组夹持组件,两组夹持组件呈对称分布,所述夹持组件包括弧形固定座、弧形夹板、圆杆、第一弹簧和拉杆,所述弧形固定座固定连接在圆盘上表面的外侧,所述圆杆滑动连接在弧形固定座上,所述弧形夹板固定连接在圆杆位于圆盘上方的一端,所述拉杆固定连接在圆杆远离弧形夹板的一端,所述第一弹簧套装在圆杆的外部,所述第一弹簧的一端固定连接在拉杆上,所述第一弹簧的另一端固定连接在弧形固定座上。
5、优选的,所述圆盘下表面的中部固定连接有第二转轴,所述第二转轴转动连接在底座上,所述底座的下表面固定连接有第三电机,所述第三电机的驱动轴固定连接在第二转轴上。
6、优选的,所述气缸背向圆盘的一侧设置有固定框,所述固定框两侧的中部均固定连接有第三转轴,所述第三转轴远离固定框的一端转动连接有支座,所述支座固定连接在底座上,其中一组支座的外侧设置有第四转轴,所述第四转轴贯穿支座且与第三转轴固定连接。
7、优选的,所述第四转轴远离支座的一端固定连接有第一齿轮,所述第四转轴的下方设置有第四电机,所述第四电机固定连接在支座上,所述第四电机的驱动轴固定连接有第二齿轮,所述第二齿轮和第一齿轮啮合连接。
8、优选的,所述固定框的两侧均开设有通孔,所述通孔沿着固定框的宽度方向分布,所述通孔内部的两端均插接有l型卡杆,两组l型卡杆之间固定连接有第二弹簧。
9、本实用新型的有益效果在于:驱动组件带动焊接机器人横向移动,扩大焊接的范围,同时由第二电机通过气缸带动旋转,并可升降调整高度,实现了对底座的全覆盖;第三电机带动圆盘以及夹持组件旋转,第四电机通过第三转轴带动固定框翻转,可满足不同的焊接需要,无需人工更换位置,提高焊接机的自动化程度,提高焊接效率。
技术特征:
1.一种多工位多轴变位焊接机,包括底座(1),所述底座(1)的上方设置有焊接机器人(2),所述底座(1)的上方还设置有带动焊接机器人(2)横向移动的驱动机构,其特征在于:所述驱动机构包括u型架(3)、第一电机(4)、丝杠(5)、滑块(6)和滑槽(7),所述第一电机(4)固定连接在u型架(3)的外部,所述丝杠(5)固定连接在第一电机(4)的驱动轴上,所述滑槽(7)开设在u型架(3)朝向丝杠(5)的一面上,丝杠(5)和滑槽(7)均沿着u型架(3)的长度方向分布,所述滑块(6)朝向滑槽(7)的一面固定连接有凸块,所述凸块与滑槽(7)吻合,所述滑块(6)上开设有与丝杠(5)配合的螺纹孔,所述焊接机器人(2)固定连接在滑块(6)的顶部。
2.根据权利要求1所述的多工位多轴变位焊接机,其特征在于:所述u型架(3)下表面的中部固定连接有气缸(8),所述气缸(8)的底部固定连接有第一转轴(9),所述第一转轴(9)转动连接在底座(1)的中部,所述底座(1)的下表面固定连接有第二电机(10),所述第二电机(10)的驱动轴固定连接在第一转轴(9)上。
3.根据权利要求2所述的多工位多轴变位焊接机,其特征在于:所述气缸(8)的一侧设置有圆盘(13),所述圆盘(13)的上表面设置有两组夹持组件,两组夹持组件呈对称分布,所述夹持组件包括弧形固定座(14)、弧形夹板(15)、圆杆(16)、第一弹簧(17)和拉杆(18),所述弧形固定座(14)固定连接在圆盘(13)上表面的外侧,所述圆杆(16)滑动连接在弧形固定座(14)上,所述弧形夹板(15)固定连接在圆杆(16)位于圆盘(13)上方的一端,所述拉杆(18)固定连接在圆杆(16)远离弧形夹板(15)的一端,所述第一弹簧(17)套装在圆杆(16)的外部,所述第一弹簧(17)的一端固定连接在拉杆(18)上,所述第一弹簧(17)的另一端固定连接在弧形固定座(14)上。
4.根据权利要求3所述的多工位多轴变位焊接机,其特征在于:所述圆盘(13)下表面的中部固定连接有第二转轴(12),所述第二转轴(12)转动连接在底座(1)上,所述底座(1)的下表面固定连接有第三电机(11),所述第三电机(11)的驱动轴固定连接在第二转轴(12)上。
5.根据权利要求4所述的多工位多轴变位焊接机,其特征在于:所述气缸(8)背向圆盘(13)的一侧设置有固定框(19),所述固定框(19)两侧的中部均固定连接有第三转轴(20),所述第三转轴(20)远离固定框(19)的一端转动连接有支座(21),所述支座(21)固定连接在底座(1)上,其中一组支座(21)的外侧设置有第四转轴(22),所述第四转轴(22)贯穿支座(21)且与第三转轴(20)固定连接。
6.根据权利要求5所述的多工位多轴变位焊接机,其特征在于:所述第四转轴(22)远离支座(21)的一端固定连接有第一齿轮(24),所述第四转轴(22)的下方设置有第四电机(23),所述第四电机(23)固定连接在支座(21)上,所述第四电机(23)的驱动轴固定连接有第二齿轮(25),所述第二齿轮(25)和第一齿轮(24)啮合连接。
7.根据权利要求5所述的多工位多轴变位焊接机,其特征在于:所述固定框(19)的两侧均开设有通孔(27),所述通孔(27)沿着固定框(19)的宽度方向分布,所述通孔(27)内部的两端均插接有l型卡杆(26),两组l型卡杆(26)之间固定连接有第二弹簧(28)。
技术总结
本技术公开了一种多工位多轴变位焊接机,涉及到焊接技术领域,包括底座,所述底座的上方设置有焊接机器人,所述底座的上方还设置有带动焊接机器人横向移动的驱动机构,所述第一电机固定连接在U型架的外部,所述丝杠固定连接在第一电机的驱动轴上,所述滑槽开设在U型架朝向丝杠的一面上,丝杠和滑槽均沿着U型架的长度方向分布,所述滑块朝向滑槽的一面固定连接有凸块,所述滑块上开设有与丝杠配合的螺纹孔。该多工位多轴变位焊接机,由U型架、第一电机、丝杠、滑块和滑槽组成的驱动组件,带动焊接机器人横向移动,扩大焊接的范围,同时由第二电机通过气缸带动旋转,并可升降调整高度,实现了对底座的全覆盖。
技术研发人员:彭少华
受保护的技术使用者:苏州佩恩机器人有限公司
技术研发日:20221128
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!