一种视觉激光焊锡机器人的制作方法
本技术涉及焊锡机器人设计领域,具体涉及一种视觉激光焊锡机器人。
背景技术:
1、焊锡机器人,顾名思义,就是用机器设备来代替手工焊锡作业,一般是由控制系统、发热系统以及机械结构组成,焊锡机器人目前已经成为一种趋势,能够有效的代替人工,提高生产效率,焊锡机器人,是应用于焊锡焊接工位,区别于波峰焊和回流焊等过炉焊接,主要用于替代简单且重复性强的手工焊接的设备。现有的焊锡机器人,焊锡精度低,从而导致产品的优良率低,不适于工业应用。
2、为此,有必要提出一种技术手段解决上述缺陷。
技术实现思路
1、本实用新型采用如下技术方案:
2、一种视觉激光焊锡机器人,所述视觉激光焊锡机包括有工作台、安装于所述工作台上的送料组件、安装于所述送料组件上的产品治具、安装于所述产品治具上方的焊锡组件;其中,所述焊锡组件包括有安装于所述产品治具上方的焊锡单元、与所述焊锡单元相连,用以识别产品焊锡点的视觉单元、与所述视觉单元相连,用以驱动所述视觉单元以及所述焊锡单元升降的升降单元、与所述升降单元相连,用以驱动所述升降单元水平移动的水平移动单元。
3、优选的,所述送料组件设有两组、两组所述送料组件并排安装于所述工作台上。
4、优选的,所述送料组件包括有第一导板、第一导块以及驱动单元;所述第一导板安装于所述工作台上,并与所述焊锡组件中的水平移动单元相垂直;所述第一导板内设有第一导槽;所述第一导块滑动安装于所述第一导槽内;所述驱动单元与所述第一导块相连,用以驱动所述第一导块沿着所述第一导槽移动;所述产品治具安装于所述第一导块上。
5、优选的,所述驱动单元包括有第一丝杆、第一电机以及第一传动带;所述第一丝杆安装于所述第一导槽内,并与所述第一导块相连;所述第一电机通过所述第一传动带与所述第一丝杆相连,用以通过所述第一传动带带动所述第一丝杆转动。
6、优选的,所述升降单元包括有第一连接板、第二电机、第二丝杆、第二导块以及第二连接板;所述第一连接板安装于所述水平移动单元的一侧;所述第二电机安装于所述第一连接板远离所述水平移动单元的一侧;所述第二丝杆安装于所述第二电机下方;所述第二导块安装于所述第二丝杆;所述第二连接板安装于所述第二导块一侧,并与所述第二导块相连;所述视觉单元以及所述焊锡单元安装于所述第二连接板远离所述第二导块的一侧。
7、优选的,所述视觉单元包括一摄像装置;所述摄像装置安装于所述第二连接板的一侧;所述焊锡单元安装于所述摄像装置的一侧。
8、优选的,所述焊锡单元包括有安装于所述摄像装置一侧的焊枪、及安装于所述焊枪上方的送锡器。
9、优选的,所述水平移动单元包括有水平安装座、第三导块、以及水平驱动装置;所述水平安装座水平安装于所述第一连接板的一侧,并与所述送料组件的送料方向垂直;所述水平安装座内设有第三导槽;所述第三导块滑动安装于所述第三导槽内,并与所述第一连接板相连;所述水平驱动装置与所述第三导块相连,用以驱动所述第三导块在所述第三导槽内水平移动。
10、优选的,所述水平驱动装置包括有第三丝杆、第三电机以及第二传动带;所述第三丝杆安装于所述第三导槽内,并与所述第三导块相连;所述第三电机通过所述第二传动带与所述第三丝杆相连,用以驱动所述第三丝杆转动。
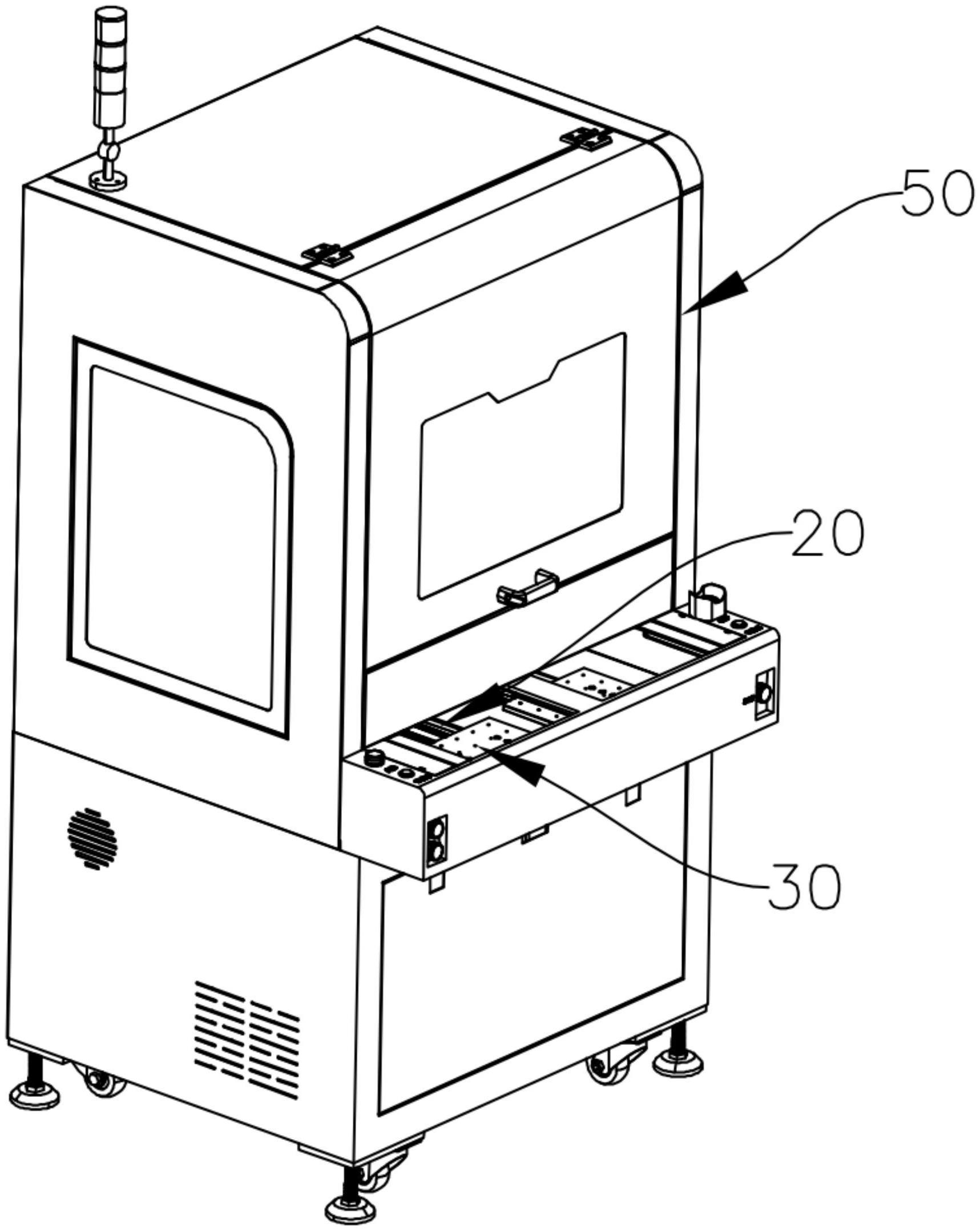
11、优选的,所述焊锡组件的外部安装有一防护罩;所述送料组件的一端伸出所述防护罩。
12、本实用新型所涉及的一种视觉焊锡机器人,通过焊锡组件中的焊锡单元、视觉识别单元、升降单元以及水平移动单元的设置,能有精准有效的对产品的焊锡点进行识别并进行焊锡工作,提高了产品的优良率。
技术特征:
1.一种视觉激光焊锡机器人,其特征在于:所述视觉激光焊锡机包括有工作台、安装于所述工作台上的送料组件、安装于所述送料组件上的产品治具、安装于所述产品治具上方的焊锡组件;其中,所述焊锡组件包括有安装于所述产品治具上方的焊锡单元、与所述焊锡单元相连,用以识别产品焊锡点的视觉单元、与所述视觉单元相连,用以驱动所述视觉单元以及所述焊锡单元升降的升降单元、与所述升降单元相连,用以驱动所述升降单元水平移动的水平移动单元。
2.根据权利要求1所述一种视觉激光焊锡机器人,其特征在于:所述送料组件设有两组、两组所述送料组件并排安装于所述工作台上。
3.根据权利要求2所述一种视觉激光焊锡机器人,其特征在于:所述送料组件包括有第一导板、第一导块以及驱动单元;所述第一导板安装于所述工作台上,并与所述焊锡组件中的水平移动单元相垂直;所述第一导板内设有第一导槽;所述第一导块滑动安装于所述第一导槽内;所述驱动单元与所述第一导块相连,用以驱动所述第一导块沿着所述第一导槽移动;所述产品治具安装于所述第一导块上。
4.根据权利要求3所述一种视觉激光焊锡机器人,其特征在于:所述驱动单元包括有第一丝杆、第一电机以及第一传动带;所述第一丝杆安装于所述第一导槽内,并与所述第一导块相连;所述第一电机通过所述第一传动带与所述第一丝杆相连,用以通过所述第一传动带带动所述第一丝杆转动。
5.根据权利要求1所述一种视觉激光焊锡机器人,其特征在于:所述升降单元包括有第一连接板、第二电机、第二丝杆、第二导块以及第二连接板;所述第一连接板安装于所述水平移动单元的一侧;所述第二电机安装于所述第一连接板远离所述水平移动单元的一侧;所述第二丝杆安装于所述第二电机下方;所述第二导块安装于所述第二丝杆;所述第二连接板安装于所述第二导块一侧,并与所述第二导块相连;所述视觉单元以及所述焊锡单元安装于所述第二连接板远离所述第二导块的一侧。
6.根据权利要求5所述一种视觉激光焊锡机器人,其特征在于:所述视觉单元包括一摄像装置;所述摄像装置安装于所述第二连接板的一侧;所述焊锡单元安装于所述摄像装置的一侧。
7.根据权利要求6所述一种视觉激光焊锡机器人,其特征在于:所述焊锡单元包括有安装于所述摄像装置一侧的焊枪、及安装于所述焊枪上方的送锡器。
8.根据权利要求5所述一种视觉激光焊锡机器人,其特征在于:所述水平移动单元包括有水平安装座、第三导块、以及水平驱动装置;所述水平安装座水平安装于所述第一连接板的一侧,并与所述送料组件的送料方向垂直;所述水平安装座内设有第三导槽;所述第三导块滑动安装于所述第三导槽内,并与所述第一连接板相连;所述水平驱动装置与所述第三导块相连,用以驱动所述第三导块在所述第三导槽内水平移动。
9.根据权利要求8所述一种视觉激光焊锡机器人,其特征在于:所述水平驱动装置包括有第三丝杆、第三电机以及第二传动带;所述第三丝杆安装于所述第三导槽内,并与所述第三导块相连;所述第三电机通过所述第二传动带与所述第三丝杆相连,用以驱动所述第三丝杆转动。
10.根据权利要求1所述一种视觉激光焊锡机器人,其特征在于:所述焊锡组件的外部安装有一防护罩;所述送料组件的一端伸出所述防护罩。
技术总结
本技术涉及焊锡机器人设计领域,具体涉及一种视觉激光焊锡机器人。所述视觉激光焊锡机包括有工作台、安装于所述工作台上的送料组件、安装于所述送料组件上的产品治具、安装于所述产品治具上方的焊锡组件;其中,所述焊锡组件包括有安装于所述产品治具上方的焊锡单元、与所述焊锡单元相连,用以识别产品焊锡点的视觉单元、与所述视觉单元相连,用以驱动所述视觉单元以及所述焊锡单元升降的升降单元、与所述升降单元相连,用以驱动所述升降单元水平移动的水平移动单元。通过焊锡组件中的焊锡单元、视觉识别单元、升降单元以及水平移动单元的设置,能有精准有效的对产品的焊锡点进行识别并进行焊锡工作,提高了产品的优良率。
技术研发人员:陈圣平,李曾荣,周袁凤
受保护的技术使用者:东莞市纳声电子设备科技有限公司
技术研发日:20221207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!