一种金属激光焊接机器人的制作方法
本技术涉及激光焊接机器人,特别涉及一种金属激光焊接机器人。
背景技术:
1、随着工业行业的不断发展,激光焊接机器人得到了广泛的使用,激光焊接机器人以半导体激光器作为的焊接热源的焊接设备,其原理是通过摄像头对工件,上的标记点照射后,经高性能画像处理装置和激光变位传感器,对焊接位置和高度进行补正。
2、公开号为cn105364306a的专利说明书中公开了一种激光焊接机器人,包括激光焊接头和位于副转动轴上的控制板,所述激光焊接头包括激光喷嘴和圆形摆动筒,所述激光喷嘴位于圆形摆动筒内,所述圆形摆动筒内壁的同一圆周上设有四个均布的电磁铁,电磁铁与控制板电连接,四个电磁铁形成环形腔,激光喷嘴的尾部安装有环形磁铁,且环形磁铁位于环形腔内。本发明在焊接微小直线缝时具有耗能较小的特点,此激光焊接机器人在使用时存在不足之处:
3、1、金属激光焊接机器人通常是固定的,不便于移动其位置,增加了金属激光焊接机器人的移动难度,进而影响其使用效果;
4、2、金属激光焊接机器人在实际使用时,不便于根据工作台的高度来调节金属激光焊接机器人的高度,降低使用效果,因此,有必要研究出一种金属激光焊接机器人来解决上述问题。
技术实现思路
1、(一)要解决的技术问题
2、本实用新型的目的是提供一种金属激光焊接机器人,用以解决现有的金属激光焊接机器人不便于移动位置的缺陷。
3、(二)
技术实现要素:
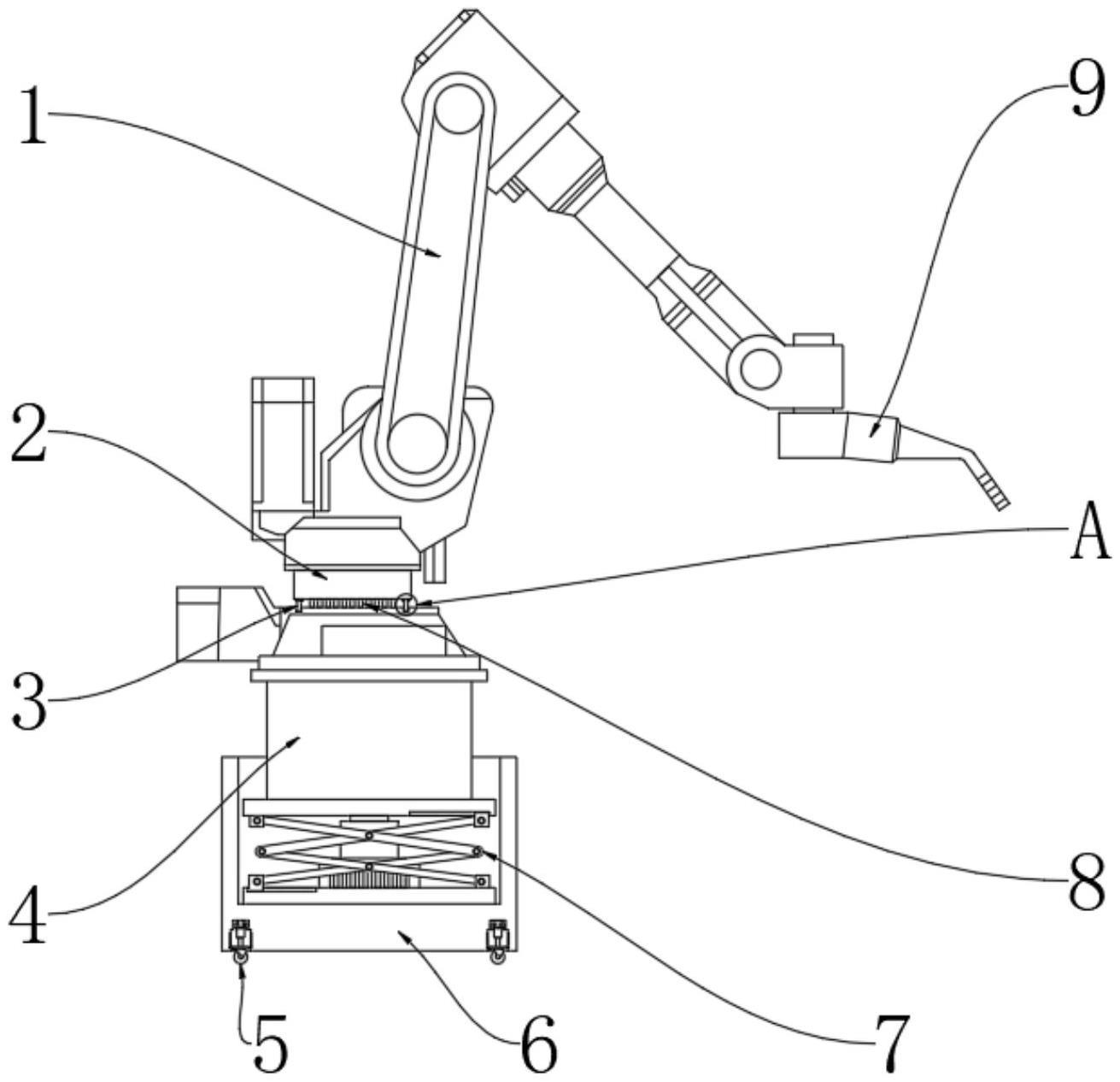
4、为了解决上述技术问题,本实用新型提供如下技术方案:一种金属激光焊接机器人,包括机器人主体、固定底座和支撑架,所述支撑架底端的四个拐角处均设置有移动结构,所述移动结构包括有滑槽、滑轮、连接块、滑块、驱动气缸和空腔,所述空腔均安装在支撑架底端的四个拐角处,所述空腔的内部均安装有驱动气缸,所述驱动气缸的底端均安装有连接块,且连接块的两侧均安装有滑块,所述滑块的一侧均设置有滑槽,所述连接块的底端均安装有滑轮,所述支撑架的内部设置有升降结构,所述支撑架的顶端安装有固定底座,所述固定底座内部的顶端安装有旋转电机,且旋转电机的顶端安装有旋转座,所述旋转座底端的两侧均设置有限位结构,所述旋转座的顶端安装有机器人主体,所述机器人主体的一端安装有激光焊接头。设置的移动结构便于移动机器人主体的位置,提高其使用效果。
5、优选的,所述限位结构包括有限位块、固定块和限位槽,所述固定块均安装在旋转座底端的两侧,所述固定块的底端均安装有限位块,且限位块的底端均设置有限位槽。设置的限位结构可起到一定的限位作用,提高旋转座旋转的稳定性。
6、优选的,所述限位块呈对称设置,所述限位块在旋转座的底端呈对称分布。
7、优选的,所述限位槽设置在固定底座的顶端,所述限位槽的截面积为圆形。
8、优选的,所述连接块安装在空腔的内部,所述连接块的截面积小于空腔的截面积。
9、优选的,所述滑块的外径小于滑槽的内径,所述滑块与滑槽构成滑动结构。
10、优选的,所述升降结构包括有固定板、液压气缸、剪刀架和升降板,所述固定板安装在支撑架内部的底端,所述固定板的顶端安装有液压气缸,且液压气缸的外侧安装有剪刀架,所述液压气缸的顶端安装有升降板。设置的升降结构便于调节机器人主体的高度,提高其使用效果。
11、(三)有益效果
12、本实用新型提供的金属激光焊接机器人,其优点在于:
13、(1)通过在支撑架底端四个拐角处设置的驱动气缸,启动驱动气缸,使得滑轮从空腔的内部伸出,滑轮的使用便于移动机器人主体的位置,关闭驱动气缸,将滑轮收纳至空腔的内部,可提高机器人主体放置的稳定性;
14、(2)通过在支撑架内部设置的液压气缸,启动液压气缸,升降板带动固定底座向上移动,实现调节机器人主体高度的目的,使得机器人主体能适用不同高度的工作台,提高机器人主体的使用效果;
15、(3)通过在固定底座内部顶端设置的旋转电机,启动旋转电机,旋转座可带动机器人主体进行旋转,实现调节机器人主体角度的目的,在旋转座进行旋转时,通过限位块与限位槽的限位作用,可提高旋转的稳定性。
技术特征:
1.一种金属激光焊接机器人,包括机器人主体(1)、固定底座(4)和支撑架(6),其特征在于:所述支撑架(6)底端的四个拐角处均设置有移动结构(5),所述移动结构(5)包括有滑槽(501)、滑轮(502)、连接块(503)、滑块(504)、驱动气缸(505)和空腔(506),所述空腔(506)均安装在支撑架(6)底端的四个拐角处,所述空腔(506)的内部均安装有驱动气缸(505),所述驱动气缸(505)的底端均安装有连接块(503),且连接块(503)的两侧均安装有滑块(504),所述滑块(504)的一侧均设置有滑槽(501),所述连接块(503)的底端均安装有滑轮(502),所述支撑架(6)的内部设置有升降结构(7),所述支撑架(6)的顶端安装有固定底座(4);
2.根据权利要求1所述的一种金属激光焊接机器人,其特征在于:所述限位结构(3)包括有限位块(301)、固定块(302)和限位槽(303),所述固定块(302)均安装在旋转座(2)底端的两侧,所述固定块(302)的底端均安装有限位块(301),且限位块(301)的底端均设置有限位槽(303)。
3.根据权利要求2所述的一种金属激光焊接机器人,其特征在于:所述限位块(301)呈对称设置,所述限位块(301)在旋转座(2)的底端呈对称分布。
4.根据权利要求2所述的一种金属激光焊接机器人,其特征在于:所述限位槽(303)设置在固定底座(4)的顶端,所述限位槽(303)的截面积为圆形。
5.根据权利要求1所述的一种金属激光焊接机器人,其特征在于:所述连接块(503)安装在空腔(506)的内部,所述连接块(503)的截面积小于空腔(506)的截面积。
6.根据权利要求1所述的一种金属激光焊接机器人,其特征在于:所述滑块(504)的外径小于滑槽(501)的内径,所述滑块(504)与滑槽(501)构成滑动结构。
7.根据权利要求1所述的一种金属激光焊接机器人,其特征在于:所述升降结构(7)包括有固定板(701)、液压气缸(702)、剪刀架(703)和升降板(704),所述固定板(701)安装在支撑架(6)内部的底端,所述固定板(701)的顶端安装有液压气缸(702),且液压气缸(702)的外侧安装有剪刀架(703),所述液压气缸(702)的顶端安装有升降板(704)。
技术总结
本技术涉及激光焊接机器人技术领域,提供一种金属激光焊接机器人,包括机器人主体、固定底座和支撑架,支撑架底端的四个拐角处均设置有移动结构,移动结构包括有滑槽、滑轮、连接块、滑块、驱动气缸和空腔,空腔均安装在支撑架底端的四个拐角处,空腔的内部均安装有驱动气缸,驱动气缸的底端均安装有连接块,且连接块的两侧均安装有滑块,滑块的一侧均设置有滑槽,连接块的底端均安装有滑轮。本技术通过在支撑架底端四个拐角处设置的驱动气缸,启动驱动气缸,使得滑轮从空腔的内部伸出,滑轮的使用便于移动机器人主体的位置,关闭驱动气缸,将滑轮收纳至空腔的内部,可提高机器人主体放置的稳定性。
技术研发人员:林雅倩
受保护的技术使用者:厦门真好汉自动化设备有限公司
技术研发日:20221212
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!