一种机械手总成的制作方法
本技术涉及机械手总成,具体为一种机械手总成。
背景技术:
1、机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门;多关节式机械手又可分为大臂与小臂;大臂可绕肩部摆动多角,小臂对大臂可绕肘部上下摆动,手臂还可以左右转动;机械手为生产自动化,可减轻繁重的体力劳动、改善劳动条件和安全生产;提高生产效率、产品质量的稳定、降低废品率、降低生产成本、增加企业的竞争力等方面起到不可估计的作用;现有机械夹持精准度差等一些技术问题,自动化程度低、设备加工精度低、定位精度低;从而增加了劳动力,浪费了资源,生产率低。
2、现有的机械手总成,在冲压完成后,对成型器件的下料,和未冲压器件的填补为分段式操作,通过独立的下料组件对成型器件进行夹取下料,等下料操作结束后,填料组件才会将未冲压器件进行夹取,向模具内进行填补,分段式操作,会浪费较多的时间,未能在下料过程中,将未冲压器件填补,多次反复,浪费时间叠加,会使得机械手整体的冲压工作效率降低。
3、于是,有鉴于此,针对现有的结构不足予以研究改良,提出一种机械手总成。
技术实现思路
1、本实用新型的目的在于提供一种机械手总成,以解决上述背景技术中提出的问题。
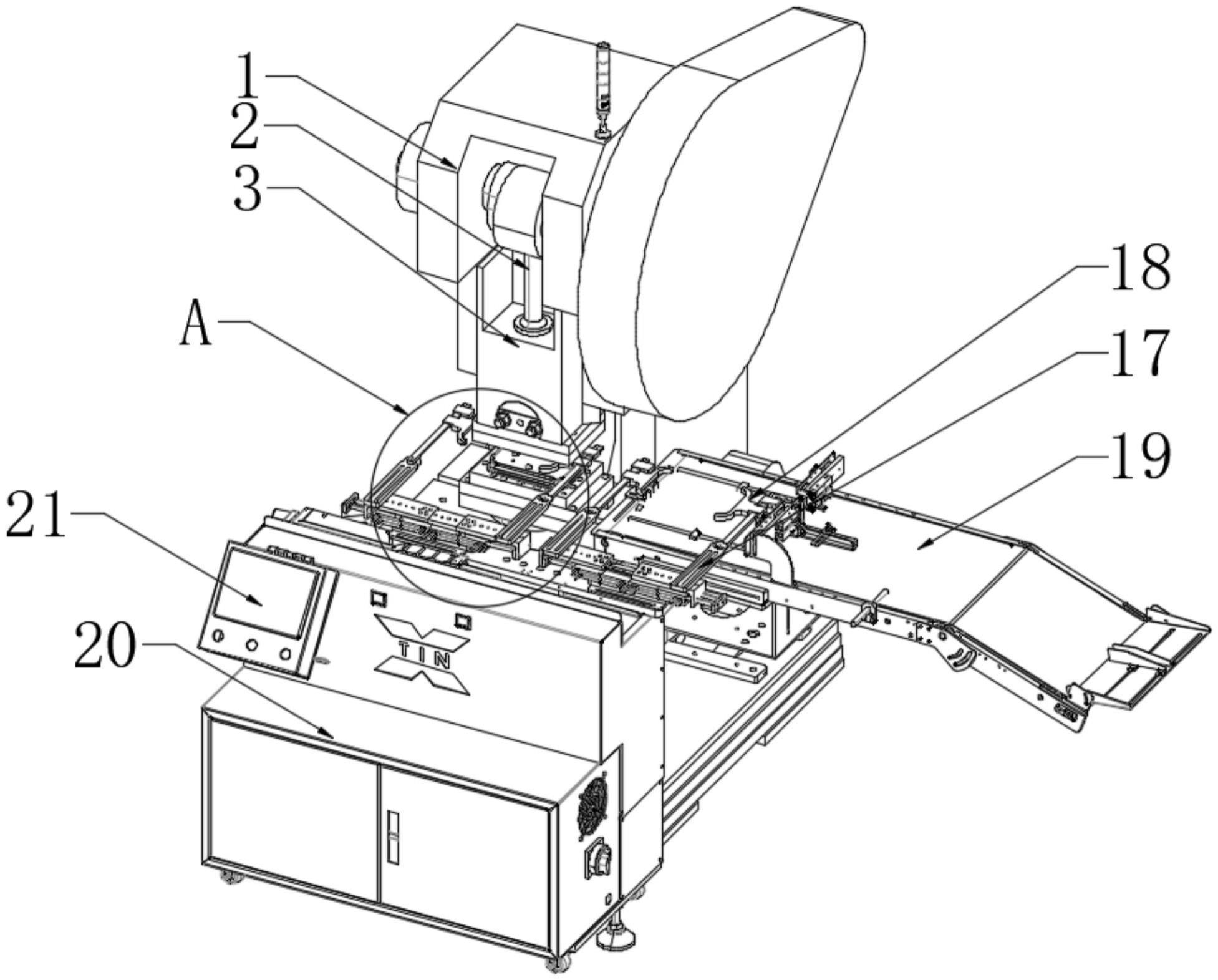
2、为实现上述目的,本实用新型提供如下技术方案:一种机械手总成,包括机械手主体和升降组件,所述机械手主体的一侧固定安装有冲压杆,所述冲压杆的一端固定连接有冲接头,所述冲接头的外表面下端安装有冲压模具,所述冲压模具的下方设置有下半模具,所述升降组件安装于下半模具的外表面下方,所述下半模具的一侧设置有第一夹具,且第一夹具的一端安装有第一连接柄,所述第一连接柄的一端固定安装有第一滑动板,所述第一滑动板的内表面设置有固定导向板,所述固定导向板的一侧安装有气缸,所述气缸的一端设置有推杆,所述机械手主体的一端固定安装有电器箱。
3、进一步的,所述气缸的一侧固定安装有调节板,且调节板的外表面一侧固定连接有滑动模组。
4、进一步的,所述滑动模组的内表面下方安装有导向杆,且导向杆与电器箱固定连接。
5、进一步的,所述我第一滑动板的一侧设置有第二滑动板,且第二滑动板与第一滑动板相同,并且第二滑动板的内表面也设置有固定导向板。
6、进一步的,所述第二滑动板的一端设置有第二连接柄,且到第二连接柄的一端安装有第二夹具,并且第二夹具与第一夹具通过同步带连接使其工作时同步运动。
7、进一步的,所述机械手主体的外表面右侧固定安装有输送带,且输送带与第二夹具相平行。
8、进一步的,所述电器箱的外表面一侧安装有控制模块,且控制模块与电器箱固定连接。
9、与现有技术相比,本实用新型的有益效果是:
10、1.本实用新型通过第一滑动板、固定导向板、气缸、推杆和第二滑动板的设置,气缸推动推杆向两侧延展,使第一滑动板和第二滑动板带动第一连接柄和第二连接柄向两侧展开,第一夹具和第二夹具分别跟随第一连接柄和第二连接柄同步运动,物料输送来时,气缸使推杆收缩,第一夹具和第二夹具会将物料夹紧固定;
11、2.本实用新型通过滑动模组和导向杆的设置,滑动模组会带动第一夹具和第二夹具沿着导向杆同步运动,第一夹具会夹持冲压完成的模具进行下料工作,而第二夹具会将未完成冲压的模具向下半模具内进行填补,使下料补料集中一体化操作,提高工作效率,减少了下料补料的时间;
12、3.本实用新型通过第一连接柄、调节板和第二连接柄的设置,第一连接柄和第二连接柄可以通过半圆弧槽改变自身安装的角度,人工可以自行调节需要的不同角度对第一连接柄和第二连接柄进行调节,改变第一夹具和第二夹具的夹取角度,而调节板可以改变夹持机构整体的角度,使夹持机构整体的运行轨迹达到人工需求的方向,使该设备能够最大限度满足操作需求。
技术特征:
1.一种机械手总成,包括机械手主体(1)和升降组件(6),其特征在于,所述机械手主体(1)的一侧固定安装有冲压杆(2),所述冲压杆(2)的一端固定连接有冲接头(3),所述冲接头(3)的外表面下端安装有冲压模具(4),所述冲压模具(4)的下方设置有下半模具(5),所述升降组件(6)安装于下半模具(5)的外表面下方,所述下半模具(5)的一侧设置有第一夹具(7),且第一夹具(7)的一端安装有第一连接柄(8),所述第一连接柄(8)的一端固定安装有第一滑动板(9),所述第一滑动板(9)的内表面设置有固定导向板(10),所述固定导向板(10)的一侧安装有气缸(11),所述气缸(11)的一端设置有推杆(12),所述机械手主体(1)的一端固定安装有电器箱(20)。
2.根据权利要求1所述的一种机械手总成,其特征在于,所述气缸(11)的一侧固定安装有调节板(13),且调节板(13)的外表面一侧固定连接有滑动模组(14)。
3.根据权利要求2所述的一种机械手总成,其特征在于,所述滑动模组(14)的内表面下方安装有导向杆(15),且导向杆(15)与电器箱(20)固定连接。
4.根据权利要求1所述的一种机械手总成,其特征在于,所述第一滑动板(9)的一侧设置有第二滑动板(16),且第二滑动板(16)与第一滑动板(9)相同,并且第二滑动板(16)的内表面也设置有固定导向板(10)。
5.根据权利要求4所述的一种机械手总成,其特征在于,所述第二滑动板(16)的一端设置有第二连接柄(17),且到第二连接柄(17)的一端安装有第二夹具(18),并且第二夹具(18)与第一夹具(7)通过同步带连接使其工作时同步运动。
6.根据权利要求1所述的一种机械手总成,其特征在于,所述机械手主体(1)的外表面右侧固定安装有输送带(19),且输送带(19)与第二夹具(18)相平行。
7.根据权利要求1所述的一种机械手总成,其特征在于,所述电器箱(20)的外表面一侧安装有控制模块(21),且控制模块(21)与电器箱(20)固定连接。
技术总结
本技术公开了一种机械手总成,涉及机械手总成技术领域,包括机械手主体和升降组件,所述机械手主体的一侧固定安装有冲压杆,所述冲压杆的一端固定连接有冲接头,所述冲接头的外表面下端安装有冲压模具,所述冲压模具的下方设置有下半模具,所述升降组件安装于下半模具的外表面下方,所述下半模具的一侧设置有第一夹具,且第一夹具的一端安装有第一连接柄。该机械手总成,与现有的普通机械手总成相比,滑动模组会带动第一夹具和第二夹具沿着导向杆同步运动,第一夹具会夹持冲压完成的模具进行下料工作,而第二夹具会将未完成冲压的模具向下半模具内进行填补,使下料补料集中一体化操作,提高工作效率,减少了下料补料的时间。
技术研发人员:钟春雷,何俊林
受保护的技术使用者:优匠时代智能科技(东莞)有限公司
技术研发日:20221224
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!