一种机器人精密部件加工柔性夹具的制作方法
本技术涉及机器人生产设备,尤其涉及一种机器人精密部件加工柔性夹具。
背景技术:
1、机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器,在机器人的生产与加工中,各式各样的零件加工与拼装是其主要工作,其中精密部件加工工艺多为先普通加工出外形,再通过精细加工完成成品,在此过程中需要夹具对零件进行夹紧,因此需要机器人精密部件加工夹具。
2、然而现有技术中机器人精密部件加工柔性夹具在使用过程中仍存在不足之处,其一在对机器人零部件进行加工时,无法对不同尺寸大小的机器人零件进行快速固定,影响装置的正常使用,降低了工作的效率,实用性较差;其二现有的机器人精密部件加工柔性夹具,大多放置在地面上,但由于地面在长期使用中,易产生磨损,导致在加工时,无法保证夹具内部的零件是否处于水平状态,间接增加了加工零件的报废率,无法满足使用要求,为此,本领域技术人员提出一种机器人精密部件加工柔性夹具来解决上述问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种机器人精密部件加工柔性夹具。
2、为了实现上述目的,本实用新型采用了如下技术方案:一种机器人精密部件加工柔性夹具,包括底板,所述底板的顶端左侧固定连接有固定座,所述固定座的右端安装有伺服电机,所述伺服电机的输出端贯穿固定座的外壁且固定连接有第一螺纹杆,所述第一螺纹杆的外部螺纹连接有螺纹块,所述螺纹块的顶端转动连接有调节杆,所述底板的顶端右侧固定连接有支撑板,所述支撑板通过转轴连接有顶板,所述顶板的前端固定连接有水平仪,所述顶板的顶端固定连接有工作台,所述工作台的顶端中部开设有第二安装槽,所述第二安装槽的内部转动连接有第二螺纹杆,所述第二螺纹杆的外部螺纹连接有两个螺纹套,所述螺纹套的顶端固定连接有夹板。
3、作为上述技术方案的进一步描述:
4、所述第二螺纹杆的外壁前后两侧螺纹为对称设置,所述第二螺纹杆的前端贯穿工作台的外壁且固定连接有转柄。
5、作为上述技术方案的进一步描述:
6、所述工作台的顶端左右两侧均设置有第一安装槽,所述第一安装槽的内部滑动连接有两个活动块,所述活动块的顶端与夹板的底端固定连接。
7、作为上述技术方案的进一步描述:
8、所述调节杆的另一端转动连接在顶板的底端左侧。
9、作为上述技术方案的进一步描述:
10、所述第一螺纹杆的左端转动连接在固定座的内左壁。
11、作为上述技术方案的进一步描述:
12、两个所述夹板互为对称设置,所述夹板的内侧设置有橡胶垫。
13、作为上述技术方案的进一步描述:
14、所述底板的底端均固定连接有四个万向轮,四个万向轮分别固定连接在底板的底端四角处。
15、本实用新型具有如下有益效果:
16、1、本实用新型中,通过增设第二安装槽、第二螺纹杆、螺纹套、夹板等结构之间相互配合使用,从而可以将机器人不同大小的精密零件进行快速固定,对零件的两端进行固定,防止加工时,零件出现滑动的现象,提高了工作的效率。
17、2、本实用新型中,通过增设伺服电机、固定座、水平仪、调节杆、第一螺纹杆等结构之间的相互配合使用,从而可以将工作台调整至水平状态,再对零件进行加工,从而间接减少了加工零件的报废率,满足使用要求。
技术特征:
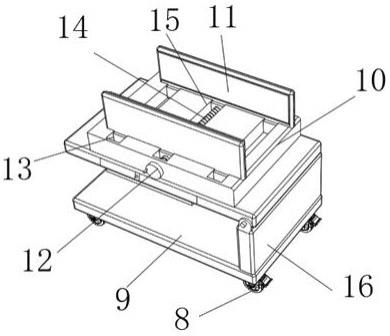
1.一种机器人精密部件加工柔性夹具,包括底板(9),其特征在于:所述底板(9)的顶端左侧固定连接有固定座(4),所述固定座(4)的右端安装有伺服电机(7),所述伺服电机(7)的输出端贯穿固定座(4)的外壁且固定连接有第一螺纹杆(5),所述第一螺纹杆(5)的外部螺纹连接有螺纹块(6),所述螺纹块(6)的顶端转动连接有调节杆(3),所述底板(9)的顶端右侧固定连接有支撑板(16),所述支撑板(16)通过转轴连接有顶板(2),所述顶板(2)的前端固定连接有水平仪(1),所述顶板(2)的顶端固定连接有工作台(10),所述工作台(10)的顶端中部开设有第二安装槽(15),所述第二安装槽(15)的内部转动连接有第二螺纹杆(14),所述第二螺纹杆(14)的外部螺纹连接有两个螺纹套(18),所述螺纹套(18)的顶端固定连接有夹板(11)。
2.根据权利要求1所述的一种机器人精密部件加工柔性夹具,其特征在于:所述第二螺纹杆(14)的外壁前后两侧螺纹为对称设置,所述第二螺纹杆(14)的前端贯穿工作台(10)的外壁且固定连接有转柄(12)。
3.根据权利要求1所述的一种机器人精密部件加工柔性夹具,其特征在于:所述工作台(10)的顶端左右两侧均设置有第一安装槽(13),所述第一安装槽(13)的内部滑动连接有两个活动块(17),所述活动块(17)的顶端与夹板(11)的底端固定连接。
4.根据权利要求1所述的一种机器人精密部件加工柔性夹具,其特征在于:所述调节杆(3)的另一端转动连接在顶板(2)的底端左侧。
5.根据权利要求1所述的一种机器人精密部件加工柔性夹具,其特征在于:所述第一螺纹杆(5)的左端转动连接在固定座(4)的内左壁。
6.根据权利要求1所述的一种机器人精密部件加工柔性夹具,其特征在于:两个所述夹板(11)互为对称设置,所述夹板(11)的内侧设置有橡胶垫。
7.根据权利要求1所述的一种机器人精密部件加工柔性夹具,其特征在于:所述底板(9)的底端均固定连接有四个万向轮(8),四个万向轮(8)分别固定连接在底板(9)的底端四角处。
技术总结
本技术涉及机器人生产设备技术领域,公开了一种机器人精密部件加工柔性夹具,包括底板,所述底板的顶端左侧固定连接有固定座,所述固定座的右端安装有伺服电机,所述伺服电机的输出端贯穿固定座的外壁且固定连接有第一螺纹杆,所述第一螺纹杆的外部螺纹连接有螺纹块,所述螺纹块的顶端转动连接有调节杆,所述底板的顶端右侧固定连接有支撑板,所述支撑板通过转轴连接有顶板。本技术中,可以将机器人不同大小的精密零件进行快速固定,对零件的两端进行固定,防止加工时,零件出现滑动的现象,提高了工作的效率,同时可以将工作台调整至水平状态,再对零件进行加工,从而间接减少了加工零件的报废率,满足使用要求。
技术研发人员:王新峰
受保护的技术使用者:苏州拓格智能科技有限公司
技术研发日:20221229
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!