一种阀体自动上下料夹取装置的制作方法
本发明涉及阀体加工设备,尤其涉及一种阀体自动上下料夹取装置。
背景技术:
1、阀体在加工过程中,常需要将半成品加工件抓取输送至相关的机加工设备进行加工。在目前行业当中,输送运转主要通过人工手动将阀体置于机床加工位,完成单面加工后再由人工手动调整加工位进行后续加工动作,最终完成阀体制作,对于多工位机床加工阀体,存在人工成本高、劳动强度大、技术效率低的缺陷。
2、基于此,本案由此提出。
技术实现思路
1、本发明的目的在于提供一种阀体自动上下料夹取装置,在原有的阀体加工设备基础上推出机器人对阀体进行自动抓取转移,可大大提升工作效率,降低加工成本,同时保证作业安全性。
2、为了实现上述目的,本发明的技术方案如下:
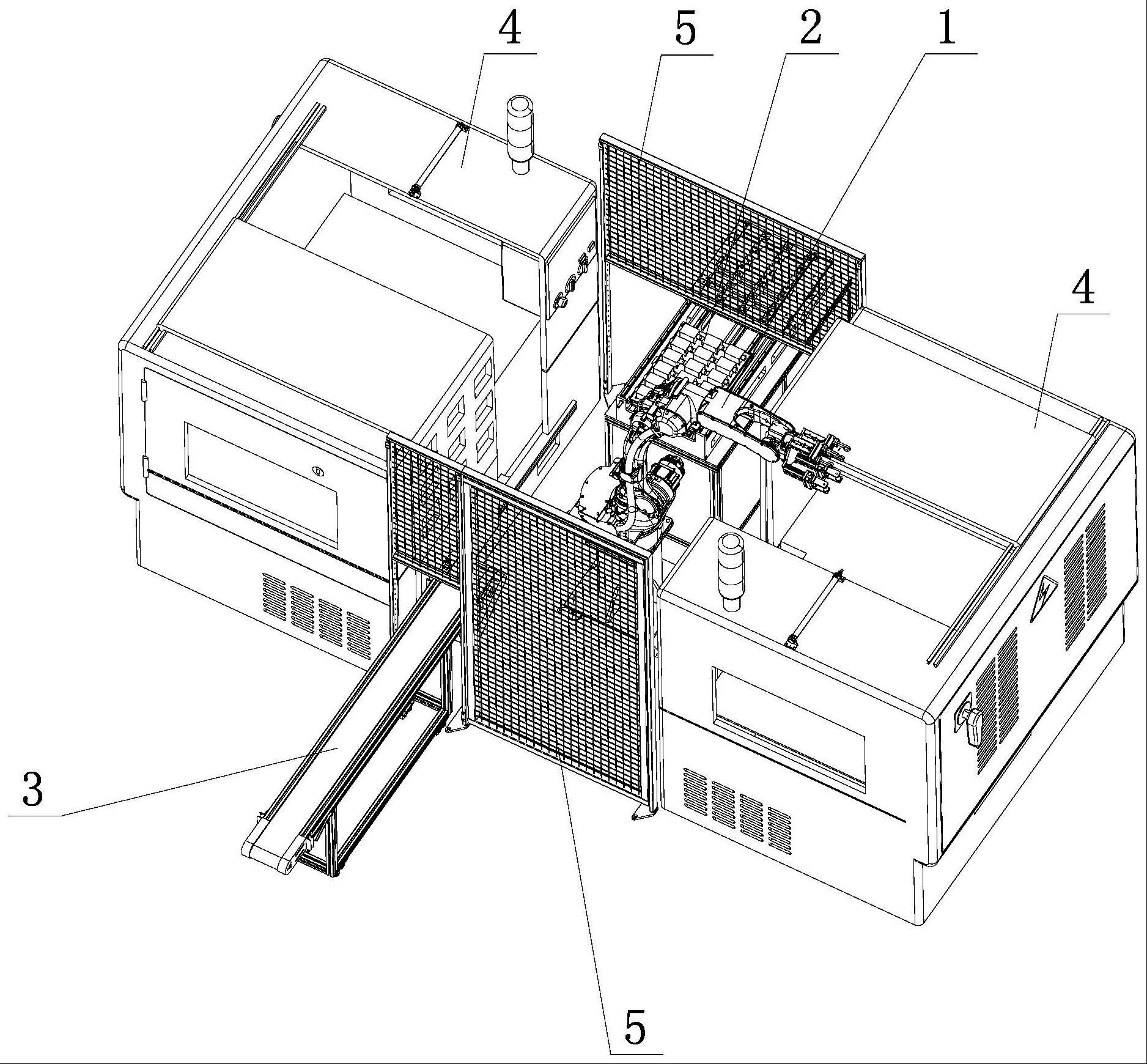
3、一种阀体自动上下料夹取装置,包括位于中心的机械臂,机械臂的周向上设有上料机构、输送机构和机加工机床;
4、所述机械臂的底部设有第一底座,第一底座的底部安装有第一可调座脚,所述机械臂的端部设有安装座,安装座上固定有多个第一驱动部,第一驱动部的动作端安装有第二驱动部,所述第一驱动部用于驱动第二驱动部作伸缩运动,所述第二驱动部的动作端安装有两个夹爪,第二驱动部用于驱动两个夹爪作相向或相背运动。
5、进一步的,所述夹爪为t型夹爪。
6、进一步的,所述夹爪用于夹取的部位设有柔性垫层。
7、进一步的,所述柔性垫层采用橡胶垫或聚氨酯垫。
8、进一步的,所述机加工机床有两台且相对布置,上料机构和输送机构相对设置,两台所述机加工机床之间设有位于上料机构侧的防护网门和位于输送机构侧的防护网门。
9、进一步的,所述上料机构包括u型底架、第一平移部和第二平移部,u型底架通过直线导轨副滑动连接有下层滑板和上层滑板,所述第一平移部用于驱动下层滑板靠近或远离机械臂,第二平移部用于驱动上层滑板靠近或远离机械臂。
10、进一步的,所述上层滑板和下层滑板上均设有换装载板及换装载板限位块。
11、进一步的,所述换装载板上设有阀体定位槽。
12、进一步的,所述上料机构包括第二底座,u型底架位于第二底座的上方,所述第二底座的底部安装有第二可调座脚。
13、本发明的优点在于:夹取机构通过安装座连接在机器人控制臂上,采用滑台气缸以及气动手指气缸实现夹爪对阀体的夹取及转运,通过机器抓取代替人工抓取,提高生产效率,降低了生产成本,完善作业安全。
技术特征:
1.一种阀体自动上下料夹取装置,其特征在于,包括位于中心的机械臂,机械臂的周向上设有上料机构、输送机构和机加工机床;
2.如权利要求1所述的一种阀体自动上下料夹取装置,其特征在于,所述夹爪为t型夹爪。
3.如权利要求1所述的一种阀体自动上下料夹取装置,其特征在于,所述夹爪用于夹取的部位设有柔性垫层。
4.如权利要求3所述的一种阀体自动上下料夹取装置,其特征在于,所述柔性垫层采用橡胶垫或聚氨酯垫。
5.如权利要求1所述的一种阀体自动上下料夹取装置,其特征在于,所述机加工机床有两台且相对布置,上料机构和输送机构相对设置,两台所述机加工机床之间设有位于上料机构侧的防护网门和位于输送机构侧的防护网门。
6.如权利要求1所述的一种阀体自动上下料夹取装置,其特征在于,所述上料机构包括u型底架、第一平移部和第二平移部,u型底架通过直线导轨副滑动连接有下层滑板和上层滑板,所述第一平移部用于驱动下层滑板靠近或远离机械臂,第二平移部用于驱动上层滑板靠近或远离机械臂。
7.如权利要求6所述的一种阀体自动上下料夹取装置,其特征在于,所述上层滑板和下层滑板上均设有换装载板及换装载板限位块。
8.如权利要求7所述的一种阀体自动上下料夹取装置,其特征在于,所述换装载板上设有阀体定位槽。
9.如权利要求6所述的一种阀体自动上下料夹取装置,其特征在于,所述上料机构包括第二底座,u型底架位于第二底座的上方,所述第二底座的底部安装有第二可调座脚。
技术总结
本发明涉及一种阀体自动上下料夹取装置,一种阀体自动上下料夹取装置,包括位于中心的机械臂,机械臂的周向上设有上料机构、输送机构和机加工机床;所述机械臂的底部设有第一底座,第一底座的底部安装有第一可调座脚,所述机械臂的端部设有安装座,安装座上固定有多个第一驱动部,第一驱动部的动作端安装有第二驱动部,所述第一驱动部用于驱动第二驱动部作伸缩运动,所述第二驱动部的动作端安装有两个夹爪,第二驱动部用于驱动两个夹爪作相向或相背运动;优势在于:夹取机构通过安装座连接在机器人控制臂上,采用滑台气缸以及气动手指气缸实现夹爪对阀体的夹取及转运,通过机器抓取代替人工抓取,提高生产效率,降低了生产成本,完善作业安全。
技术研发人员:陆丹华,阮方圆,唐永,徐家辉
受保护的技术使用者:哈工大机器人集团(杭州湾)国际创新研究院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!