智能装配系统
本发明涉及生产装配,具体而言,涉及一种智能装配系统。
背景技术:
1、在工业制造比如产品装配中,已经出现了不少基于机器视觉的生产应用,但是这些应用都是基于装配零件工作台的小范围视觉感知,感知范围较小。因此,应用在工业现场的人工智能水平还停留在人工智能早期技术的模式识别水平,工业智能化程度并不高。
技术实现思路
1、为解决上述问题,本发明实施例的目的在于提供一种智能装配系统。
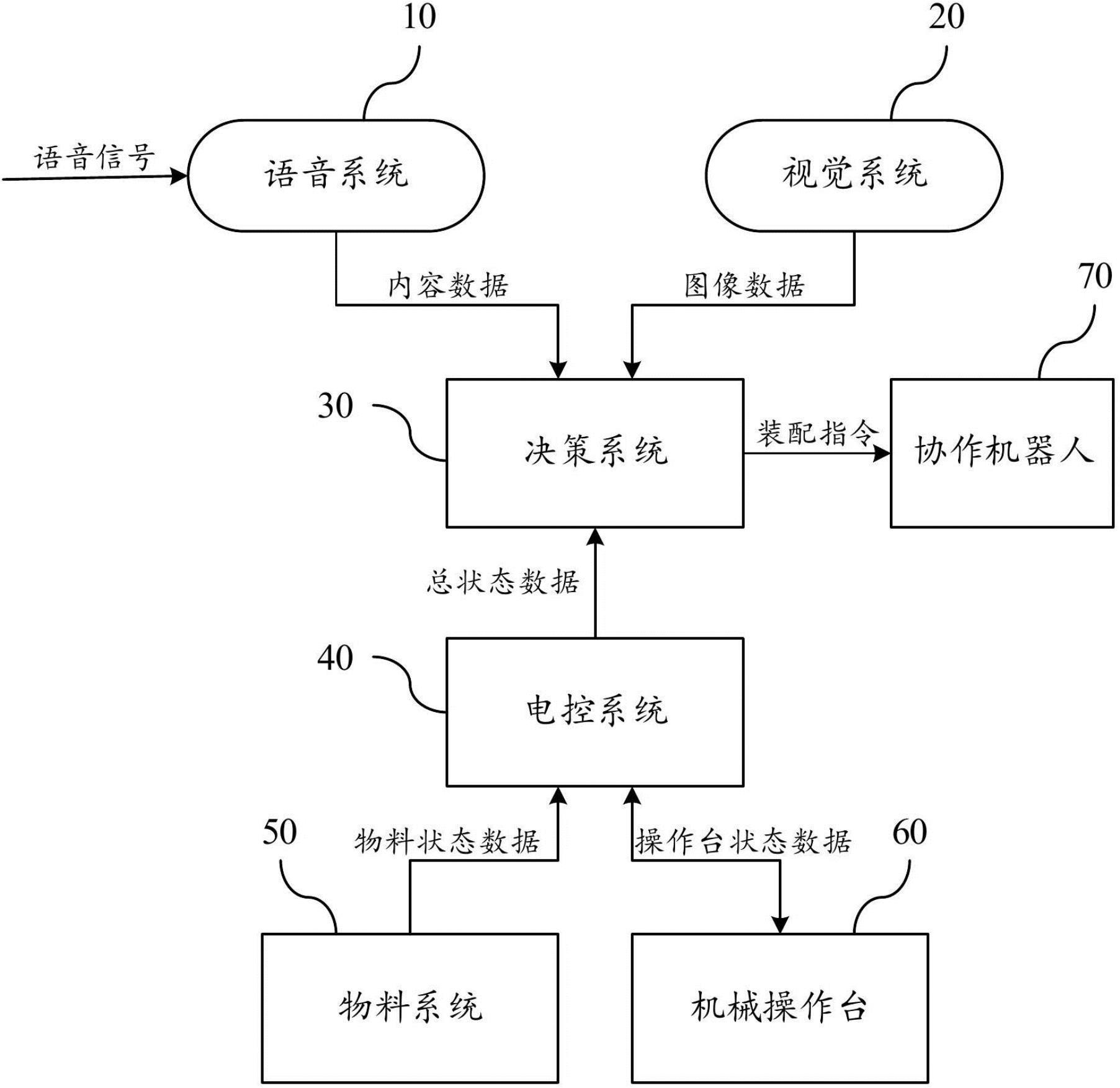
2、本发明实施例提供了一种智能装配系统,包括:语音系统、视觉系统、决策系统、电控系统、物料系统、机械操作台和协作机器人;
3、所述语音系统与所述决策系统相连,用于采集接收到的语音信号,识别出所述语音信号中的内容数据,并将所述内容数据发送至所述决策系统;
4、所述视觉系统与所述决策系统相连,用于采集装配区域的图像数据,并将所述图像数据发送至所述决策系统;所述装配区域至少包括所述机械操作台中用于装配物料的区域;
5、所述物料系统与所述电控系统相连,用于采集物料的物料状态数据,并将所述物料状态数据发送至所述电控系统;
6、所述机械操作台与所述电控系统相连,用于将自身的操作台状态数据发送至所述电控系统;
7、所述电控系统与所述决策系统相连,用于将总状态数据反馈至所述决策系统;所述总状态数据包括所述物料状态数据和/或所述操作台状态数据;
8、所述决策系统用于根据所接收到输入数据,生成相应的装配指令,并将所述装配指令发送至所述协作机器人;所述输入数据包括所述内容数据、所述图像数据和所述总状态数据;
9、所述协作机器人用于响应所述装配指令,对所述物料系统中的物料进行装配。
10、在一种可能的实现方式中,所述语音系统包括语音采集模块、语音识别模块和语义理解模块,所述语音采集模块包括近端语音接收器和/或远端语音接收器;
11、所述语音采集模块与所述语音识别模块相连,用于采集接收到的语音信号,并将所述语音信号发送至所述语音识别模块;
12、所述语音识别模块与所述语义理解模块相连,用于对所述语音信号进行语音识别处理,提取出所述语音信号包含的文本内容,并将所述文本内容发送至所述语义理解模块;
13、所述语义理解模块用于根据知识图谱对所述文本内容进行语义理解,确定与装配任务相关的文本数据。
14、在一种可能的实现方式中,所述内容数据包括所述智能装配系统所在车间的环境信息。
15、在一种可能的实现方式中,所述决策系统用于通信的信道包括控制信道和数据信道;
16、所述决策系统通过所述控制信道接收所述语音系统发送的所述内容数据,并通过所述控制信道向所述协作机器人发送所述装配指令;
17、所述决策系统通过所述数据信道接收所述视觉系统发送的所述图像数据以及所述电控系统反馈的所述总状态数据。
18、在一种可能的实现方式中,所述决策系统根据所接收到输入数据,生成相应的装配指令的过程包括:
19、所述决策系统根据所接收到的输入数据确定与当前环境相对应的当前模式,所述当前模式为预先配置的模式;
20、生成与所述当前模式适配的装配指令。
21、在一种可能的实现方式中,所述装配指令具有相应的优先级,所述决策系统优先输出高优先级的装配指令。
22、在一种可能的实现方式中,所述决策系统还用于接收高层生产执行系统和/或高级排产系统发送的生产命令,并将所述生产命令作为所述输入数据中的一项。
23、在一种可能的实现方式中,所述机械操作台包括:至少一个夹爪治具台,所述夹爪治具台包括多个不同规格的夹爪;
24、所述协作机器人用于从所述夹爪治具台中选取与当前待装配物料相一致的目标夹爪作为抓取部件,通过所述目标夹爪抓取所述当前待装配物料,并对所述当前待装配物料进行装配。
25、在一种可能的实现方式中,所述机械操作台包括:移动装置和/或升降装置;
26、所述移动装置用于改变所述机械操作台在车间中的位置;
27、所述升降装置用于改变所述机械操作台中用于装配物料的区域的高度。
28、在一种可能的实现方式中,智能装配系统还包括:位置传感器、压力传感器和接近传感器;
29、所述位置传感器设置在所述机械操作台中用于装配物料的区域,用于确定所述协作机器人是否将物料放置至正确位置;或者,所述位置传感器设置在所述物料系统中物料所在位置,用于确定物料是否到位;
30、所述压力传感器设置在所述机械操作台中用于装配物料的区域的下方,用于确定已装配结构的重量;或者,所述压力传感器设置在所述物料系统中物料下方,用于确定物料是否被抓取;
31、所述接近传感器设置在所述机械操作台上,用于确定所述协作机器人是否接近所述机械操作台。
32、本发明实施例提供的方案中,基于语音系统、视觉系统、物料系统、机械操作台等可以感知多种环境信息,且语音系统可以方便地获取操作员所发出的语音信号,在该语音信号与车间环境相关的情况下,能够识别出与车间环境相关的信息,从而可以从单个设备的环境感知智能上升到包含车间环境的整体感知,能有效提高装配中的智能化水平,所生成的装配指令更适用于当前的环境。利用决策系统和电控系统进行分层管理,方便实现资源整合;且电控系统成本较低,可以有效降低装配系统的成本。操作员可以实时发出语音信号,语音系统可以实时感知车间环境和操作员的生产决策,能够提高装配效率。
33、此外,该智能装配系统还可以应用于工程实践教学,为智能制造技术与设备的工程教育提供新型的训练与培训系统与方法,一位实践教学人员可以语音控制多台智能装配系统,解决智能装配系统的传统教学中需要多位实践教学人员来同时进行多台设备的操作演示和理论讲解的融合教学难点问题,可以服务更多的学生且保证好的实践教学效果。
34、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种智能装配系统,其特征在于,包括:语音系统(10)、视觉系统(20)、决策系统(30)、电控系统(40)、物料系统(50)、机械操作台(60)和协作机器人(70);
2.根据权利要求1所述的智能装配系统,其特征在于,所述语音系统(10)包括语音采集模块、语音识别模块(103)和语义理解模块(104),所述语音采集模块包括近端语音接收器(101)和/或远端语音接收器(102);
3.根据权利要求1所述的智能装配系统,其特征在于,所述内容数据包括所述智能装配系统所在车间的环境信息。
4.根据权利要求3所述的智能装配系统,其特征在于,所述决策系统(30)用于通信的信道包括控制信道和数据信道;
5.根据权利要求3所述的智能装配系统,其特征在于,所述决策系统(30)根据所接收到输入数据,生成相应的装配指令的过程包括:
6.根据权利要求5所述的智能装配系统,其特征在于,所述装配指令具有相应的优先级,所述决策系统(30)优先输出高优先级的装配指令。
7.根据权利要求1所述的智能装配系统,其特征在于,所述决策系统(30)还用于接收高层生产执行系统和/或高级排产系统发送的生产命令,并将所述生产命令作为所述输入数据中的一项。
8.根据权利要求1所述的智能装配系统,其特征在于,所述机械操作台(60)包括:至少一个夹爪治具台(601),所述夹爪治具台(601)包括多个不同规格的夹爪;
9.根据权利要求1所述的智能装配系统,其特征在于,所述机械操作台(60)包括:移动装置和/或升降装置;
10.根据权利要求1所述的智能装配系统,其特征在于,还包括:位置传感器、压力传感器和接近传感器;
技术总结
本发明提供了一种智能装配系统,包括:语音系统、视觉系统、决策系统、电控系统、物料系统、机械操作台和协作机器人;语音系统将内容数据发送至决策系统;视觉系统将图像数据发送至决策系统;物料系统将物料状态数据发送至电控系统;机械操作台将自身的操作台状态数据发送至电控系统;电控系统将总状态数据反馈至决策系统;决策系统用于根据所接收到输入数据,生成相应的装配指令,并将装配指令发送至协作机器人;协作机器人用于响应装配指令,对物料系统中的物料进行装配。通过本发明实施例提供的智能装配系统,能够识别出与车间环境相关的信息,能有效提高装配中的智能化水平。
技术研发人员:朱峰,李双寿,杨建新,王健美,曾武,陈开峰,章鹏飞,王群
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!