管束式热交换器焊管机器人的制作方法
本发明属于换热器加工,特别是涉及一种管束式热交换器焊管机器人。
背景技术:
1、管束式热交换器被用于由第一流体向第二流体传递热量,为此目的,管束式热交换器通常具有空心圆柱体,在其内部布置有多个换热管,可以引导两种流体中的一种经过所述换热管,引导另一流体围绕所述换热管经过,所述管通过其末端沿着其圆周固定至管束式热交换器的管板。
2、在管束式热交换器的制造方法的过程中,所述管通过其末端与所述管板以焊接方式连接,在我们的工业装置中,一些大型换热器的换热管根数有时候会达到上千根甚至更多。为了保证焊接质量,延长热交换器的使用寿命,通常采用手工电弧焊角缝填充焊平焊的焊接方法,整根焊条焊完一道焊口,立即扔掉,中间不留任何接头,但是采用手工焊,易漏焊,劳动强度大,质量不能保证,效率低,而且传统焊接在进行氩弧焊作业时会出现大量的有害物质,对焊接工人造成伤害,给企业带来一定的经济损失。
技术实现思路
1、为了解决上述问题,本发明公开了一种焊接质量稳定,减轻工人的劳动强度,且焊接效率高的管束式热交换器焊管机器人。
2、为了达到上述目的,本发明的技术方案如下:
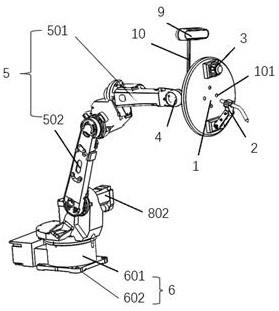
3、一种管束式热交换器焊管机器人,所述管束式热交换器焊管机器人包括旋转基座、焊接装置、扩管加工装置、机械臂、支撑装置、驱动电机、第一联接件和第二联接件,所述旋转基座呈圆盘状,中心开设有定位孔,所述第二联接件一端可拆卸式固接于所述定位孔上,另一端通过所述第一联接件和所述机械臂上端可拆卸式联接,所述机械臂下端固接于所述支撑装置上,所述驱动电机用于驱动且控制所述机械臂的运动方向,所述焊接装置和所述扩管加工装置分别安装于所述旋转基座上,并位于所述定位孔的两侧,所述焊接装置包括焊头、焊接支架、安装轴和伸缩机构,所述伸缩机构一端联接所述焊头,另一端联接于所述焊接支架的上端,所述焊接支架的下端通过所述安装轴安装于所述旋转基座上,所述扩管加工装置包括切割涨紧装置、扩管器和旋转刀具,所述切割涨紧装置、扩管器和旋转刀具均为圆轴状,且依次同轴心安装,所述旋转刀具位于扩管器轴向外部,且刀具加工面呈斜角。
4、作为本发明的进一步改进,所述管束式热交换器焊管机器人还包括视觉系统和第三联接件,所述视觉系统通过所述第三联接件联接于所述第一联接件中部,并位于所述旋转基座上方,便于操作者观察机器人操作情况。
5、作为本发明的进一步改进,所述机械臂包括小臂和大臂,所述支撑装置包括旋转底座和固定底板,所述旋转底座固接于所述固定底板上,驱动电机包括小臂驱动电机、大臂驱动电机和底座驱动电机,分别和小臂、大臂和旋转底座联接,用于控制小臂、大臂和旋转底座的运动方向,从而控制所述机械臂的运动方向,所述小臂上端联接所述第一联接件,下端和所述大臂上端可拆卸式联接,所述大臂下端可拆卸式联接于所述旋转底座上。
6、本发明的有益效果有如下几点:
7、1.本申请对比现有技术提高了焊接效率。传统氩弧焊手人工主观因素的限制,导致焊接效率低下,本发明的机器人工作时间长,作为机械设备连通焊接电源可进行长时间作业,提高了生产线效率,缩短了产品生产周期;
8、2.本申请可以实现焊接过程无人化操作,减少了用户的人工成本,安全可靠;
9、3.本申请减轻工人的劳动强度,操作人员主要是设定好焊接参数,在焊接过程中不需要人工进行干预,只需通过视觉系统进行观察,设定合适的参数,重复定位精度较高,在量产中也能保证焊接质量。
10、总之,本发明的管束式热交换器焊管机器人,可以代替传统焊接生产,改善了焊接工人的环境,提高了作业效率,缩短了产品生产周期,可实现无人化操作,降低了用户的人工成本,且定位精准,焊接质量大大提高,应用前景广泛。
技术特征:
1.一种管束式热交换器焊管机器人,其特征在于,所述管束式热交换器焊管机器人包括旋转基座(1)、焊接装置(2)、扩管加工装置(3)、机械臂(5)、支撑装置(6)、驱动电机(8)、第一联接件(4)和第二联接件(7),所述旋转基座(1)呈圆盘状,中心开设有定位孔(101),所述第二联接件(7)一端可拆卸式固接于所述定位孔(101)上,另一端通过所述第一联接件(4)和所述机械臂(5)上端可拆卸式联接,所述机械臂(5)下端固接于所述支撑装置(6)上,所述驱动电机(8)用于驱动且控制所述机械臂(5)的运动方向,所述焊接装置(2)和所述扩管加工装置(3)分别安装于所述旋转基座(1)上,并位于所述定位孔(101)的两侧,所述焊接装置(2)包括焊头(201)、焊接支架(202)、安装轴(203)和伸缩机构(204),所述伸缩机构(204)一端联接所述焊头(201),另一端联接于所述焊接支架(202)的上端,所述焊接支架(202)的下端通过所述安装轴(203)安装于所述旋转基座(1)上,所述扩管加工装置(3)包括切割涨紧装置(301)、扩管器(302)和旋转刀具(303),所述切割涨紧装置(301)、扩管器(302)和旋转刀具(303)均为圆轴状,且依次同轴心安装,所述旋转刀具(303)位于扩管器(302)轴向外部,且刀具加工面呈斜角。
2.根据权利要求1所述的一种管束式热交换器焊管机器人,其特征在于,所述管束式热交换器焊管机器人还包括视觉系统(9)和第三联接件(10),所述视觉系统(9)通过所述第三联接件(10)联接于所述第一联接件(4)中部,并位于所述旋转基座(1)上方,便于操作者观察机器人操作情况。
3.根据权利要求2所述的一种管束式热交换器焊管机器人,其特征在于,所述机械臂(5)包括小臂(501)和大臂(502),所述支撑装置(6)包括旋转底座(601)和固定底板(602),所述旋转底座(601)固接于所述固定底板(602)上,驱动电机(8)包括小臂驱动电机(801)、大臂驱动电机(802)和底座驱动电机(803),分别和小臂(501)、大臂(502)和旋转底座(601)联接,用于控制小臂(501)、大臂(502)和旋转底座(601)的运动方向,从而控制所述机械臂(5)的运动方向,所述小臂(501)上端联接所述第一联接件(4),下端和所述大臂(502)上端可拆卸式联接,所述大臂(502)下端可拆卸式联接于所述旋转底座(601)上。
技术总结
本发明公开了一种管束式热交换器焊管机器人,属于热交换器加工领域,本发明的管束式热交换器焊管机器人,包括旋转基座、焊接装置、扩管加工装置、机械臂、支撑装置、驱动电机,结构简单,易操作,可以代替传统焊接生产,改善了焊接工人的环境,提高了作业效率,缩短了产品生产周期,可实现无人化操作,降低了用户的人工成本,且定位精准,焊接质量大大提高,应用前景广泛。
技术研发人员:赵劲松,刘文博,贺赟晖,牛瑞坤,赵国情,王丽杰
受保护的技术使用者:南京和邦能源科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!