一种用于加工的激光切割机器人
本发明属于激光切割组件,特别是涉及一种用于加工的激光切割机器人。
背景技术:
1、激光切割是利用经聚焦的高功率密度激光束照射工件,使被照射的材料迅速熔化、汽化或达到燃点,同时借助与光束同轴的高速气流吹除熔融物质,从而实现将工件割开,由于没有刀具加工成本,所以激光切割设备也适用生产小批量的原先不能加工的各种尺寸的部件。激光切割设备通常采用计算机化数字控制技术cnc装置。
2、在通过激光切割机器人对钢板等构件进行切割时,机械臂随着规划后的线路在钢板上方进行行走,完成机械臂上的激光头的切割行走,在行走过程中根据切割厚度常需要对激光头的高度进行预先计算,但在实际的施工过程中,由于钢板构件等在输送或加工过程中会发生变形和完全的情况,无法保证整体的平整性,并且通过肉眼无法有效的观察到不平整的存在,在进行切割过程中,不平整的钢板在机械臂带动激光头进行走刀过程中,极易造成激光头与变形的钢板构件撞刀的情况发生,轻度影响切割线路,严重者造成激光头断裂的情况。
3、为了保证钢板构件在切割时的平整性,目前常用的方式在切割平台上加强磁板进行吸附钢板,使得弯曲的钢板被吸附成水平状,这种方式会限制激光切割运用的场合,对构件的大小具有限制;再者提前进行预加工,将钢板构件进行平整加工,这种方式存在增加工序影响加工效率的情况,为此现提出一种用于加工的激光切割机器人。
技术实现思路
1、有鉴于此,本发明旨在提出一种用于加工的激光切割机器人,以解决现有技术中激光切割针对钢板进行切割时,易因为钢板的弯曲造成撞刀的问题。
2、为实现上述目的,本发明采用以下技术方案:一种用于加工的激光切割机器人,它包括受力臂、控制盘、滑动限定件、齿传动组件和多个调节丝杠,所述受力臂的底部设置有激光切割头,所述受力臂外侧壁通过滑动限定件与控制盘连接,所述控制盘上设置有伺服电机,所述伺服电机通过齿传动组件与多个调节丝杠相连,所述多个调节丝杠沿周向均匀间隔设置在控制盘上方,所述调节丝杠的端部连接有压力调整块,所述压力调整块上下两端分别转动连接有受力撑杆,所述受力臂的上半部设置有受力端座,所述压力调整块上端的受力撑杆的顶端与受力端座转动连接,所述压力调整块下端的受力撑杆的底端转动连接有平衡受力座,所述平衡受力座套设在激光切割头的外侧壁上,所述平衡受力座底部设置有受力感应件,所述平衡受力座内开设有多个联动口,所述联动口内壁通过受力联动件连接有承载受力块。
3、更进一步的,所述滑动限位件包括开设在受力臂上的多个矩形限位键口,所述控制盘沿竖直方向滑动套设在受力臂外侧壁上,所述控制盘的内侧设置有多个与矩形限位键口滑动配合的矩形滑动键块,所述控制盘通过矩形滑动键块与受力臂上矩形限位键口滑动连接。
4、更进一步的,所述齿传动件包括转动设置在控制盘上的传动锥齿环,传动锥齿环,位于传动锥齿环四周的所述控制盘上固定连接有多个螺母固定块,所述多个螺母固定块与多个调节丝杠一一对应设置,所述螺母固定块转动连接有驱动套筒,所述驱动套筒内一端固定连接有与传动锥齿环啮合连接的传动锥齿轮,所述驱动套筒内侧壁固定连接有与调节丝杠啮合连接的丝杠螺母。
5、更进一步的,所述伺服电机通过支撑板与控制盘连接,所述伺服电机的输出端通过驱动锥齿轮与传动锥齿环啮合传动。
6、更进一步的,所述压力调整块的上下两端均设置有u型连接块,所述u型连接块通过转轴与受力撑杆转动连接。
7、更进一步的,所述受力端座呈环形并固定连接在受力臂外侧壁上,所述受力端座的底部与受力撑杆转动连接。
8、更进一步的,所述平衡受力座的顶部设置有连接块,所述连接块转动连接有连接轴,所述压力调整块下端的受力撑杆的底端与连接轴固定连接,所述连接轴外侧壁固定连接有联动齿盘。
9、更进一步的,所述受力联动件包括设置在联动口内与联动齿盘啮合连接的齿形条,所述齿形条底部固定连接有三角压力块,所述承载受力块顶部固定连接有与三角压力块相配合的三角受力块,所述承载受力块通过复位组件与联动口内壁连接。
10、更进一步的,所述复位组件包括限制块以及开设在联动口内侧壁上的限位口,所述承载受力块两侧的侧壁上均设置有限制块,所述限制块的底部通过复位弹簧与限位口连接。
11、更进一步的,所述受力感应件包括设置在平衡受力座内的压力传感器,所述压力传感器输出端连接有感应块,所述感应块底部设置有多个抵触球。
12、与现有技术相比,本发明的有益效果是:
13、1、本发明通过在激光切割头的外围设置平衡受力座,利用设置在平衡受力座上的受力感应件,先一步的对预切割的钢板的平整度进行测量,能实现自动化感应到钢板不平整的情况,实现自动化调整,避免出现切割头切割距离变动造成的切割质量问题和切割头撞板的情况;
14、2、本发明针对目前的钢板不平整会影响激光切割头切割的情况进行设计,利用受力感应件进行感应钢板平整度,并通过伺服电机控制受力撑杆的移动,将平衡受力板对待切割处弯曲的钢板进行施加压力,将钢板进行压平,确保焊接的高度一致,显著的提高焊接的的质量和精度。
技术特征:
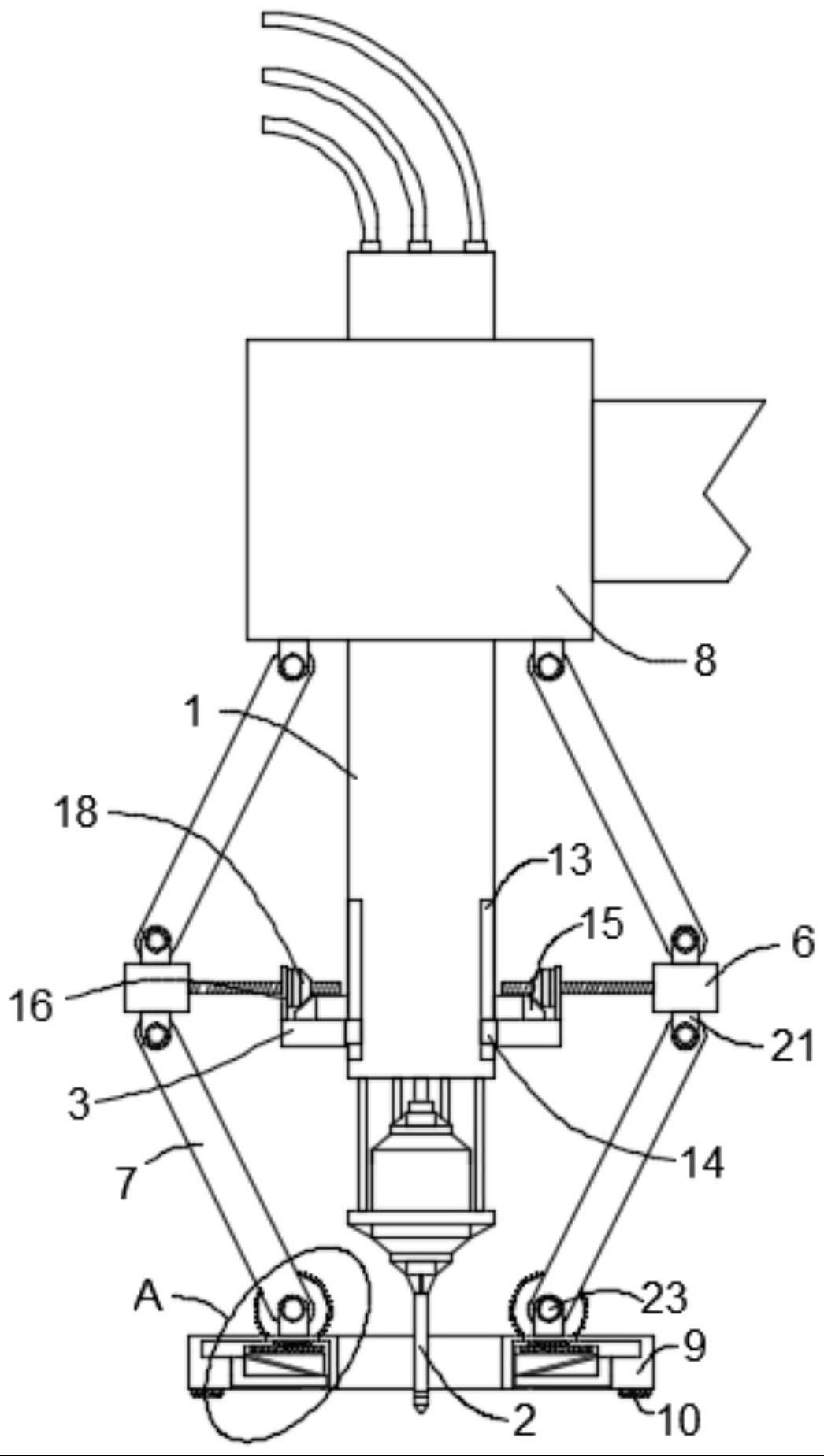
1.一种用于加工的激光切割机器人,其特征在于:它包括受力臂(1)、控制盘(3)、滑动限定件、齿传动组件和多个调节丝杠(5),所述受力臂(1)的底部设置有激光切割头(2),所述受力臂(1)外侧壁通过滑动限定件与控制盘(3)连接,所述控制盘(3)上设置有伺服电机(4),所述伺服电机(4)通过齿传动组件与多个调节丝杠(5)相连,所述多个调节丝杠(5)沿周向均匀间隔设置在控制盘(3)上方,所述调节丝杠(5)的端部连接有压力调整块(6),所述压力调整块(6)上下两端分别转动连接有受力撑杆(7),所述受力臂(1)的上半部设置有受力端座(8),所述压力调整块(6)上端的受力撑杆(7)的顶端与受力端座(8)转动连接,所述压力调整块(6)下端的受力撑杆(7)的底端转动连接有平衡受力座(9),所述平衡受力座(9)套设在激光切割头(2)的外侧壁上,所述平衡受力座(9)底部设置有受力感应件(10),所述平衡受力座(9)内开设有多个联动口(11),所述联动口(11)内壁通过受力联动件连接有承载受力块(12)。
2.根据权利要求1所述的一种用于加工的激光切割机器人,其特征在于:所述滑动限位件包括开设在受力臂(1)上的多个矩形限位键口(13),所述控制盘(3)沿竖直方向滑动套设在受力臂(1)外侧壁上,所述控制盘(3)的内侧设置有多个与矩形限位键口(13)滑动配合的矩形滑动键块(14),所述控制盘(3)通过矩形滑动键块(14)与受力臂(1)上矩形限位键口(13)滑动连接。
3.根据权利要求1所述的一种用于加工的激光切割机器人,其特征在于:所述齿传动件包括转动设置在控制盘(3)上的传动锥齿环(15),传动锥齿环(15),位于传动锥齿环(15)四周的所述控制盘(3)上固定连接有多个螺母固定块(16),所述多个螺母固定块(16)与多个调节丝杠(5)一一对应设置,所述螺母固定块(16)转动连接有驱动套筒(17),所述驱动套筒(17)内一端固定连接有与传动锥齿环(15)啮合连接的传动锥齿轮(18),所述驱动套筒(17)内侧壁固定连接有与调节丝杠(5)啮合连接的丝杠螺母(19)。
4.根据权利要求3所述的一种用于加工的激光切割机器人,其特征在于:所述伺服电机(4)通过支撑板与控制盘(3)连接,所述伺服电机(4)的输出端通过驱动锥齿轮(20)与传动锥齿环(15)啮合传动。
5.根据权利要求1所述的一种用于加工的激光切割机器人,其特征在于:所述压力调整块(6)的上下两端均设置有u型连接块(21),所述u型连接块(21)通过转轴与受力撑杆(7)转动连接。
6.根据权利要求1所述的一种用于加工的激光切割机器人,其特征在于:所述受力端座(8)呈环形并固定连接在受力臂(1)外侧壁上,所述受力端座(8)的底部与受力撑杆(7)转动连接。
7.根据权利要求1所述的一种用于加工的激光切割机器人,其特征在于:所述平衡受力座(9)的顶部设置有连接块(22),所述连接块(22)转动连接有连接轴(23),所述压力调整块(6)下端的受力撑杆(7)的底端与连接轴(23)固定连接,所述连接轴(23)外侧壁固定连接有联动齿盘(24)。
8.根据权利要求7所述的一种用于加工的激光切割机器人,其特征在于:所述受力联动件包括设置在联动口(11)内与联动齿盘(24)啮合连接的齿形条(25),所述齿形条(25)底部固定连接有三角压力块(26),所述承载受力块(12)顶部固定连接有与三角压力块(26)相配合的三角受力块(27),所述承载受力块(12)通过复位组件与联动口(11)内壁连接。
9.根据权利要求8所述的一种用于加工的激光切割机器人,其特征在于:所述复位组件包括限制块(28)以及开设在联动口(11)内侧壁上的限位口(29),所述承载受力块(12)两侧的侧壁上均设置有限制块(28),所述限制块(28)的底部通过复位弹簧与限位口(29)连接。
10.根据权利要求1所述的一种用于加工的激光切割机器人,其特征在于:所述受力感应件(10)包括设置在平衡受力座(9)内的压力传感器,所述压力传感器输出端连接有感应块,所述感应块底部设置有多个抵触球。
技术总结
本发明提出了一种用于加工的激光切割机器人,属于激光切割组件技术领域。解决了现有技术中激光切割针对钢板进行切割时,易因为钢板的弯曲造成撞刀的问题。它包括受力臂、控制盘、滑动限定件、齿传动组件和多个调节丝杠,所述受力臂的底部设置有激光切割头,所述受力臂外侧壁通过滑动限定件与控制盘连接,所述控制盘上设置有伺服电机,所述伺服电机通过齿传动组件与多个调节丝杠相连,所述多个调节丝杠沿周向均匀间隔设置在控制盘上方,所述调节丝杠的端部连接有压力调整块,所述压力调整块上下两端分别转动连接有受力撑杆。它主要用于激光切割。
技术研发人员:靳敏,周斌,谢小敏,马仕麟,白颖,杨博文,杨阿龙
受保护的技术使用者:常州机电职业技术学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!