底盘自动铆接系统及底盘自动铆接方法与流程
本发明涉及底盘铆接,具体而言,涉及一种底盘自动铆接系统及底盘自动铆接方法。
背景技术:
1、随着工业自动化的快速发展,智能装备制造以数字化、企业云、边缘计算、人工智能、新材料、机器学习为技术核心,设计制造的智能装备解放人体劳动、改善工厂作业环境、降低能源损耗,为市场提供智能、经济、接能环保、安全、稳定、可靠、技术先进的智能装备,全自动铆接生产线pid微分智能控制装置可以应用在如空调行业、汽车制造行业、食品等领域等,对加速社会生产力发展、改进企业生产技术、减轻工人体力劳动据有重大意义。以前底盘生产是由单工位多点高频大电流点焊机焊接螺栓和基脚、人工搬运物料、人工上料的分散的生产模式,生产效率低、劳动强度大、电能消耗高、污染工作环境。
2、现有技术中,底盘铆接采用人工搬运、人工焊接的方式,生产过程中人工劳动强度大、人工成本高、多点分散。
3、针对上述人工搬运、人工焊接劳动强度大和人工成本高的技术问题,目前尚未提出有效解决方案。
技术实现思路
1、本发明的主要目的在于提供一种底盘自动铆接系统及底盘自动铆接方法,以解决现有技术中人工搬运、人工焊接劳动强度大和人工成本高的问题。
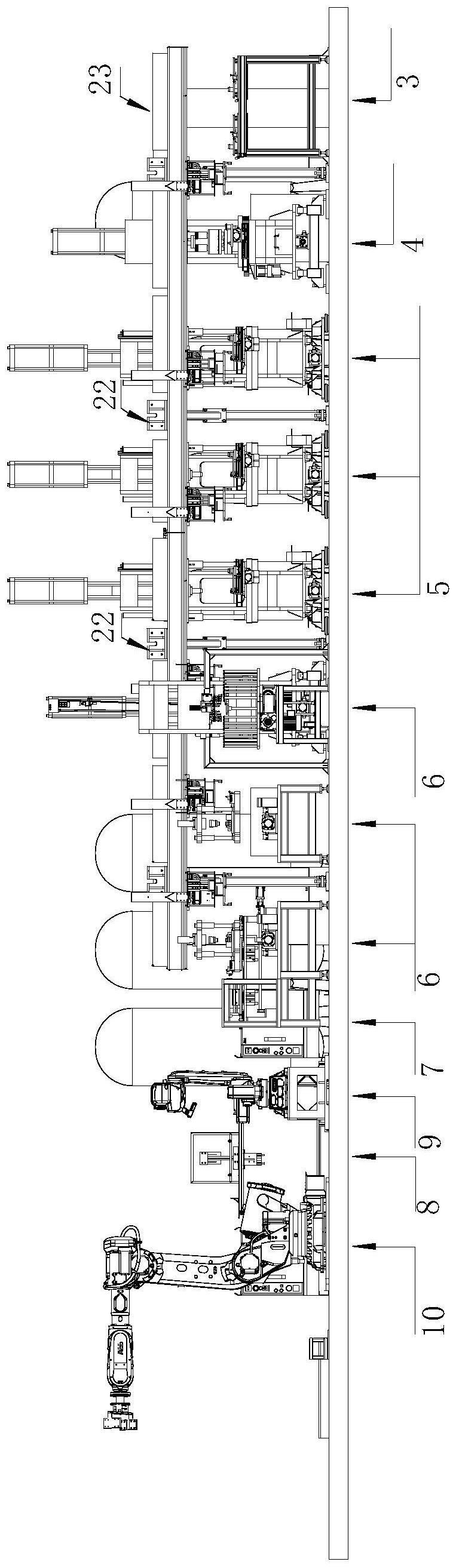
2、为了实现上述目的,根据本发明的一个方面,提供了一种底盘自动铆接系统,包括:工作台,工作台上设置有支架结构,支架结构上设置有多个悬梁式机械手,悬梁式机械手沿工作台的长度方向可滑动地设置,沿工作台的长度方向依次设置有上料工作位、冲孔工作位、螺钉铆接工作位、基脚铆接工作位和下料工作位;上料机构,上料机构设置于上料工作位,上料机构上放置至少一块底盘;自动冲孔机构,自动冲孔机构设置于冲孔工作位,自动冲孔机构用于对底盘进行冲孔;pid微分智能螺钉上料铆接机构,pid微分智能螺钉上料铆接机构设置于螺钉铆接工作位,pid微分智能螺钉上料铆接机构用于将底盘与螺钉进行铆接;pid微分智能基脚上料铆接机构,pid微分智能基脚上料铆接机构设置于基脚铆接工作位,pid微分智能基脚上料铆接机构用于将底盘与基脚进行铆接;底盘下料台,底盘下料台设置于下料工作位;其中,pid微分智能基脚上料铆接机构具有下料机构,下料机构用于将铆接完成的底盘推送至底盘下料台上。
3、进一步地,工作台还设置有质量检测工作位,质量检测工作位靠近下料工作位设置,底盘自动铆接系统还包括:底盘自动翻转质量检测装置,底盘自动翻转质量检测装置设置于质量检测工作位,底盘自动翻转质量检测装置用于检测底盘是否质量合格。
4、进一步地,底盘自动铆接系统还包括:下线机器人,下线机器人靠近下料工作位设置,下线机器人用于将底盘从底盘下料台搬运至底盘自动翻转质量检测装置上;转运码垛机器人,转运码垛机器人靠近下线机器人设置,转运码垛机器人用于将质量检测完成的底盘搬运至下料区,下料区至少包括码垛区和不合格区。
5、进一步地,底盘自动翻转质量检测装置包括:检测平台,检测平台与工作台连接,检测平台上设置有传感器测量机构、移载自动翻转机构和定位校准机构,传感器测量机构用于检测底盘是否质量合格,移载自动翻转机构用于翻转底盘,定位校准机构用于对底盘进行移动校正和定位,以使底盘处于传感器测量机构的测量范围内。
6、进一步地,支架结构包括:支撑架,支撑架为至少一个,支撑架沿工作台的高度方向延伸设置,支撑架与工作台连接;悬臂梁,悬臂梁沿工作台的长度方向延伸设置,悬臂梁与支撑架连接,悬臂梁上设置有多个悬梁式机械手,悬梁式机械手与悬臂梁可滑动地连接。
7、进一步地,pid微分智能螺钉上料铆接机构共设置三个,三个pid微分智能螺钉上料铆接机构沿工作台的长度方向具有距离地设置,每一pid微分智能螺钉上料铆接机构上均设置有螺钉上料机构。
8、进一步地,pid微分智能基脚上料铆接机构为三组,每组包括两个pid微分智能基脚上料铆接机构,三组pid微分智能基脚上料铆接机构沿工作台的长度方向具有距离地设置,同一组中的两个pid微分智能基脚上料铆接机构分别设置于支架结构的两侧,其中,靠近下料工作位的一组pid微分智能基脚上料铆接机构上设置有下料机构。
9、进一步地,靠近螺钉铆接工作位的一组pid微分智能基脚上料铆接机构上设置有基脚上料机构。
10、进一步地,上料机构上设置有取料位、上料位和移动机构,移动机构在取料位与上料位之间可移动地设置,取料位靠近冲孔工作位设置。
11、根据本发明的另一方面,提供了一种底盘自动铆接方法,底盘自动铆接方法基于上述的底盘自动铆接系统进行,底盘自动铆接方法包括:抓取位于上料工作位上的底盘并移动至冲孔工作位;对底盘进行自动冲孔;冲孔完成后,抓取底盘并移动至螺钉铆接工作位;对底盘进行螺钉铆接;螺钉铆接完成后,抓取底盘并移动至基脚铆接工作位;对底盘进行基脚铆接;基脚铆接完成后,抓取底盘并移动至质量检测工作位;对底盘进行质量检测;在底盘的检测结果为合格的情况下,抓取底盘并移动至码垛区;在底盘的检测结果为不合格的情况下,抓取底盘并移动至不合格区。
12、进一步地,上料工作位包括取料位和上料位,抓取位于上料工作位上的底盘前,方法还包括:检测取料位上是否有底盘;在确定取料位上没有底盘的情况下,控制上料机构的移动机构运动,以将位于上料位上的底盘运载至取料位。
13、应用本发明的技术方案,通过悬梁式机械手实现自动上料,自动冲孔机构、pid微分智能螺钉上料铆接机构、pid微分智能基脚上料铆接机构依次自动冲孔、螺钉铆接、基脚铆接,下料机构可以实现自动下料,达到了底盘铆接自动化的目的,解决了人工搬运、人工焊接劳动强度大和人工成本高的技术问题,有效提升生产效率。
技术特征:
1.一种底盘自动铆接系统,其特征在于,包括:
2.根据权利要求1所述的底盘自动铆接系统,其特征在于,所述工作台(1)还设置有质量检测工作位,所述质量检测工作位靠近所述下料工作位设置,所述底盘自动铆接系统还包括:
3.根据权利要求2所述的底盘自动铆接系统,其特征在于,所述底盘自动铆接系统还包括:
4.根据权利要求2所述的底盘自动铆接系统,其特征在于,所述底盘自动翻转质量检测装置(8)包括:
5.根据权利要求1所述的底盘自动铆接系统,其特征在于,所述支架结构(2)包括:
6.根据权利要求1或5所述的底盘自动铆接系统,其特征在于,所述pid微分智能螺钉上料铆接机构(5)共设置三个,三个所述pid微分智能螺钉上料铆接机构(5)沿所述工作台(1)的长度方向具有距离地设置,每一所述pid微分智能螺钉上料铆接机构(5)上均设置有螺钉上料机构。
7.根据权利要求1或5所述的底盘自动铆接系统,其特征在于,所述pid微分智能基脚上料铆接机构(6)为三组,每组包括两个所述pid微分智能基脚上料铆接机构(6),三组所述pid微分智能基脚上料铆接机构(6)沿所述工作台(1)的长度方向具有距离地设置,同一组中的两个所述pid微分智能基脚上料铆接机构(6)分别设置于所述支架结构(2)的两侧,其中,靠近所述下料工作位的一组所述pid微分智能基脚上料铆接机构(6)上设置有所述下料机构。
8.根据权利要求7所述的底盘自动铆接系统,其特征在于,靠近所述螺钉铆接工作位的一组所述pid微分智能基脚上料铆接机构(6)上设置有基脚上料机构。
9.根据权利要求1所述的底盘自动铆接系统,其特征在于,所述上料机构(3)上设置有取料位、上料位和移动机构,所述移动机构在所述取料位与上料位之间可移动地设置,所述取料位靠近所述冲孔工作位设置。
10.一种底盘自动铆接方法,其特征在于,所述底盘自动铆接方法基于权利要求1-9中任一项所述的底盘自动铆接系统进行,所述底盘自动铆接方法包括:
11.根据权利要求10所述的底盘自动铆接方法,其特征在于,上料工作位包括取料位和上料位,抓取位于上料工作位上的底盘(100)前,所述方法还包括:
技术总结
本发明提供了一种底盘自动铆接系统及底盘自动铆接方法。底盘自动铆接系统包括工作台,工作台上设置有支架结构,支架结构上设置有多个悬梁式机械手,沿工作台的长度方向依次设置有上料工作位、冲孔工作位、螺钉铆接工作位、基脚铆接工作位和下料工作位;上料机构设置于上料工作位;自动冲孔机构设置于冲孔工作位;PID微分智能螺钉上料铆接机构设置于螺钉铆接工作位;PID微分智能基脚上料铆接机构设置于基脚铆接工作位;底盘下料台设置于下料工作位;PID微分智能基脚上料铆接机构具有下料机构,下料机构用于将铆接完成的底盘推送至底盘下料台上。本方案解决了人工搬运、人工焊接劳动强度大和人工成本高的技术问题,有效提升生产效率。
技术研发人员:孙继德,李常宏,刘东阳,陈浩民,冯新发
受保护的技术使用者:珠海格力智能装备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!