一种兼容性强的激光打标设备及打标方法与流程
本发明涉及一种设备,具体为一种兼容性强的激光打标设备及打标方法,属于激光打标设备。
背景技术:
1、激光打标的基本原理是,由激光发生器生成高能量的连续激光光束,聚焦后的激光作用于承印材料,使表面材料瞬间熔融,甚至气化,通过控制激光在材料表面的路径,从而形成需要的图文标记。激光打标的特点是非接触加工,可在任何异型表面标刻,工件不会变形和产生内应力,适于金属、塑料、玻璃、陶瓷、木材、皮革等材料的标记。
2、由于激光打标的适用于各种材质,因此激光打标设备往往需要给不同的工件进行打标,而现有的激光打标设备在进行打标时,工件放置在工作台上后位置固定,需要人工手动调整工件的位置,不能根据打标需求对工件的打标位置进行调整,打标时效率较低,对工件的兼容性较差,为此,提出一种兼容性强的激光打标设备及打标方法。
技术实现思路
1、有鉴于此,本发明提供一种兼容性强的激光打标设备及打标方法,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
2、本发明实施例的技术方案是这样实现的:一种兼容性强的激光打标设备,包括夹持组件,所述夹持组件包括第一机器人、u型座、两个夹板、摄像头、硅胶垫、安装板、两个锁紧气缸、两个导向杆、限位座、拉簧和限位杆;
3、所述u型座的后表面固定连接于第一机器人的手部,两个所述锁紧气缸对称安装于u型座的两侧,两个所述夹板对称滑动连接于两个导向杆的外侧壁,所述摄像头安装于安装板的前表面,所述限位杆等距滑动连接于夹板的内部,所述硅胶垫固定连接于限位杆的一端,所述拉簧套接于限位杆的外侧壁,所述限位座固定连接于限位杆的另一端。
4、进一步优选的,所述导向杆的两端对称固定连接于u型座的内壁两侧,所述安装板固定连接于u型座的一侧。
5、进一步优选的,两个所述锁紧气缸的气缸轴对称贯穿u型座的内壁两侧并与u型座滑动连接,两个所述夹板的相远离面对称固定连接于两个锁紧气缸的气缸轴。
6、进一步优选的,所述拉簧的一端固定连接于夹板远离硅胶垫的一侧,所述拉簧的另一端固定连接于限位座靠近夹板的一侧。
7、进一步优选的,所述第一机器人的底部安装有主体组件,所述主体组件包括底座、控制开关、第二机器人、激光打标机、工作台和旋转平台;
8、所述第一机器人安装于工作台的上表面一侧,所述第二机器人安装于工作台的上表面另一侧。
9、进一步优选的,所述激光打标机安装第二机器人的手部。
10、进一步优选的,所述旋转平台安装于工作台的上表面中部,所述旋转平台位于第一机器人和第二机器人之间。
11、进一步优选的,所述控制开关安装于工作台的上表面,所述工作台安装于底座的上表面。
12、一种兼容性强的激光打标方法,包括以下步骤:
13、s1、将工件放置于旋转平台的表面,通过第一机器人带动u型座,u型座通过安装板带动摄像头对工件进行拍摄,对工件及打标位置进行识别定位;
14、s2、第一机器人带动u型座移动,使工件位于两个夹板之间,然后两个锁紧气缸推动两个夹板靠近,两个夹板带动限位杆,限位杆带动硅胶垫对工件进行夹持;
15、s3、工件通过硅胶垫给予限位杆反向推力,限位杆向远离工件的方向移动并拉动拉簧;
16、s4、通过硅胶垫可以避免工件被夹伤,此时通过第一机器人可以对工件的位置进行调整,而通过第二机器人可以带动激光打标机在工件的表面进行打标。
17、本发明实施例由于采用以上技术方案,其具有以下优点:本发明通过第一机器人带动u型座移动,使工件位于两个夹板之间,然后两个锁紧气缸推动两个夹板靠近,夹板通过硅胶垫对工件进行夹持,通过硅胶垫可以避免工件夹伤,工件通过硅胶垫给予限位杆反向推力,限位杆反向移动并拉动拉簧,此时硅胶垫可以对工件的两侧形成包裹,进而对不同形状、尺寸的工件进行夹持,而通过第一机器人带动u型座移动,即可对工件的打标位置进行调整,进而提高了打标效率和对工件的兼容性。
18、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本发明进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种兼容性强的激光打标设备,包括夹持组件(101),其特征在于:所述夹持组件(101)包括第一机器人(11)、u型座(12)、两个夹板(13)、摄像头(14)、硅胶垫(15)、安装板(16)、两个锁紧气缸(17)、两个导向杆(18)、限位座(19)、拉簧(20)和限位杆(21);
2.根据权利要求1所述的一种兼容性强的激光打标设备,其特征在于:所述导向杆(18)的两端对称固定连接于u型座(12)的内壁两侧,所述安装板(16)固定连接于u型座(12)的一侧。
3.根据权利要求1所述的一种兼容性强的激光打标设备,其特征在于:两个所述锁紧气缸(17)的气缸轴对称贯穿u型座(12)的内壁两侧并与u型座(12)滑动连接,两个所述夹板(13)的相远离面对称固定连接于两个锁紧气缸(17)的气缸轴。
4.根据权利要求1所述的一种兼容性强的激光打标设备,其特征在于:所述拉簧(20)的一端固定连接于夹板(13)远离硅胶垫(15)的一侧,所述拉簧(20)的另一端固定连接于限位座(19)靠近夹板(13)的一侧。
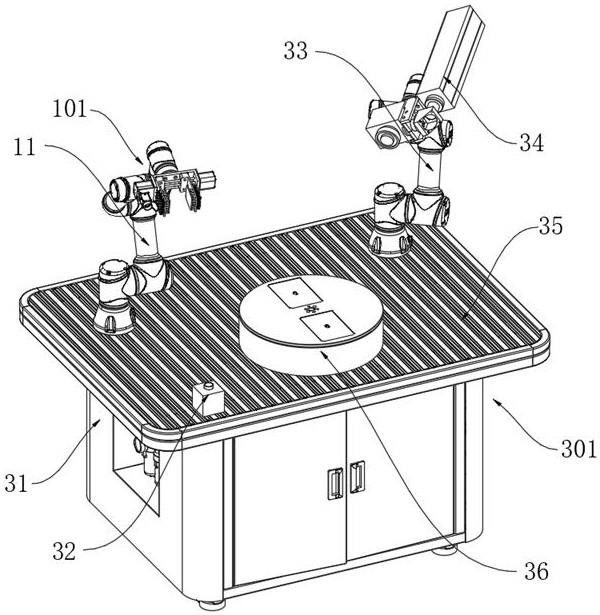
5.根据权利要求1所述的一种兼容性强的激光打标设备,其特征在于:所述第一机器人(11)的底部安装有主体组件(301),所述主体组件(301)包括底座(31)、控制开关(32)、第二机器人(33)、激光打标机(34)、工作台(35)和旋转平台(36);
6.根据权利要求5所述的一种兼容性强的激光打标设备,其特征在于:所述激光打标机(34)安装第二机器人(33)的手部。
7.根据权利要求5所述的一种兼容性强的激光打标设备,其特征在于:所述旋转平台(36)安装于工作台(35)的上表面中部,所述旋转平台(36)位于第一机器人(11)和第二机器人(33)之间。
8.根据权利要求5所述的一种兼容性强的激光打标设备,其特征在于:所述控制开关(32)安装于工作台(35)的上表面,所述工作台(35)安装于底座(31)的上表面。
9.一种根据权利要求1-8任一项所述的兼容性强的激光打标方法,其特征在于,包括以下步骤:
技术总结
本发明提供了一种兼容性强的激光打标设备及打标方法,包括夹持组件,所述夹持组件包括第一机器人、U型座、两个夹板、摄像头、硅胶垫、安装板、两个锁紧气缸、两个导向杆、限位座、拉簧和限位杆;所述U型座的后表面固定连接于第一机器人的手部。本发明通过第一机器人带动U型座移动,使工件位于两个夹板之间,然后两个锁紧气缸推动两个夹板靠近,工件通过硅胶垫给予限位杆反向推力,限位杆反向移动并拉动拉簧,此时硅胶垫可以对工件的两侧形成包裹,进而对不同形状、尺寸的工件进行夹持,而通过第一机器人带动U型座移动,即可对工件的打标位置进行调整,进而提高了打标效率和对工件的兼容性。
技术研发人员:何学财
受保护的技术使用者:苏州森伯特智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!