一种多自由度智能焊接切割控制方法及系统与流程
本发明涉及焊接控制领域,具体地,涉及一种多自由度智能焊接切割控制方法及系统。
背景技术:
1、焊丝切割、剪脚切割是自动化焊接切割的重要控制环节。现有技术中,存在缺乏结合焊接场景进行自适应调整的切割控制方案,以及焊接切割控制的精确度低、灵活性差、自由度不高的技术问题。研究设计一种对焊接切割控制进行优化的方法,具有十分重要的现实意义。
技术实现思路
1、本申请提供了一种多自由度智能焊接切割控制方法及系统。解决了现有技术中缺乏结合焊接场景进行自适应调整的切割控制方案,以及焊接切割控制的精确度低、灵活性差、自由度不高的技术问题。达到了制定结合焊接场景进行自适应调整的切割控制方案,提高焊接切割控制的精确度、灵活性、自由度,提升焊接切割控制质量的技术效果。
2、鉴于上述问题,本申请提供了一种多自由度智能焊接切割控制方法及系统。
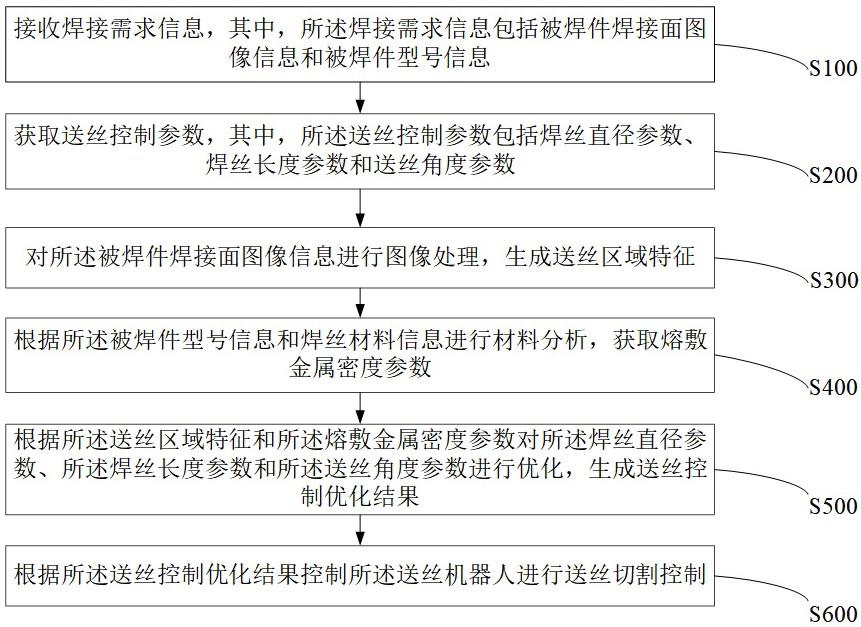
3、第一方面,本申请提供了一种多自由度智能焊接切割控制方法,其中,所述方法应用于一种多自由度智能焊接切割控制系统,所述系统包括送丝机器人、剪脚机器人,所述方法包括:接收焊接需求信息,其中,所述焊接需求信息包括被焊件焊接面图像信息和被焊件型号信息;获取送丝控制参数,其中,所述送丝控制参数包括焊丝直径参数、焊丝长度参数和送丝角度参数;对所述被焊件焊接面图像信息进行图像处理,生成送丝区域特征;根据所述被焊件型号信息和焊丝材料信息进行材料分析,获取熔敷金属密度参数;根据所述送丝区域特征和所述熔敷金属密度参数对所述焊丝直径参数、所述焊丝长度参数和所述送丝角度参数进行优化,生成送丝控制优化结果;根据所述送丝控制优化结果控制所述送丝机器人进行送丝切割控制。
4、第二方面,本申请还提供了一种多自由度智能焊接切割控制系统,其中,所述系统包括送丝机器人、剪脚机器人,所述系统还包括:焊接需求接收模块,所述焊接需求接收模块用于接收焊接需求信息,其中,所述焊接需求信息包括被焊件焊接面图像信息和被焊件型号信息;送丝控制参数获取模块,所述送丝控制参数获取模块用于获取送丝控制参数,其中,所述送丝控制参数包括焊丝直径参数、焊丝长度参数和送丝角度参数;图像处理模块,所述图像处理模块用于对所述被焊件焊接面图像信息进行图像处理,生成送丝区域特征;材料分析模块,所述材料分析模块用于根据所述被焊件型号信息和焊丝材料信息进行材料分析,获取熔敷金属密度参数;参数优化模块,所述参数优化模块用于根据所述送丝区域特征和所述熔敷金属密度参数对所述焊丝直径参数、所述焊丝长度参数和所述送丝角度参数进行优化,生成送丝控制优化结果;送丝切割控制模块,所述送丝切割控制模块用于根据所述送丝控制优化结果控制所述送丝机器人进行送丝切割控制。
5、本申请中提供的一个或多个技术方案,至少具有如下技术效果或优点:
6、通过对被焊件焊接面图像信息进行图像处理,生成送丝区域特征;通过对被焊件型号信息和焊丝材料信息进行材料分析,获取熔敷金属密度参数;通过送丝区域特征和熔敷金属密度参数对焊丝直径参数、焊丝长度参数和送丝角度参数进行优化,生成送丝控制优化结果,并按照送丝控制优化结果控制送丝机器人进行送丝切割控制。达到了制定结合焊接场景进行自适应调整的切割控制方案,提高焊接切割控制的精确度、灵活性、自由度,提升焊接切割控制质量的技术效果。
7、上述说明仅是本申请技术方案的概述,并且为了让本申请的技术方案和其他目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种多自由度智能焊接切割控制方法,其特征在于,应用于送丝机器人,包括:
2.如权利要求1所述的方法,其特征在于,对所述被焊件焊接面图像信息进行图像处理,生成送丝区域特征,包括:
3.如权利要求2所述的方法,其特征在于,遍历所述多个标记焊接区域对所述被焊件焊接面图像信息进行相似度评估,获取区域相似度大于或等于相似度阈值的多个焊接区域匹配结果,包括:
4.如权利要求3所述的方法,其特征在于,遍历所述多组特征区域关联结果进行图像相似度分析,获取多个区域相似度,之前包括:
5.如权利要求1所述的方法,其特征在于,根据所述被焊件型号信息和焊丝材料信息进行材料分析,获取熔敷金属密度参数,包括:
6.如权利要求1所述的方法,其特征在于,根据所述送丝区域特征和所述熔敷金属密度参数对所述焊丝直径参数、所述焊丝长度参数和所述送丝角度参数进行优化,生成送丝控制优化结果,包括:
7.如权利要求1所述的方法,其特征在于,应用于剪脚机器人,还包括:
8.一种多自由度智能焊接切割控制系统,其特征在于,所述系统用于执行权利要求1至7中任一项所述的方法,所述系统包括送丝机器人、剪脚机器人,所述系统还包括:
技术总结
本发明公开了一种多自由度智能焊接切割控制方法及系统,涉及焊接控制领域,其中,所述方法包括:获取送丝控制参数,送丝控制参数包括焊丝直径参数、焊丝长度参数和送丝角度参数;生成送丝区域特征;根据被焊件型号信息和焊丝材料信息进行材料分析,获取熔敷金属密度参数;根据送丝区域特征和熔敷金属密度参数对焊丝直径参数、焊丝长度参数和送丝角度参数进行优化,生成送丝控制优化结果;根据送丝控制优化结果控制送丝机器人进行送丝切割控制。解决了现有技术中缺乏结合焊接场景进行自适应调整的切割控制方案等技术问题。达到了制定结合焊接场景进行自适应调整的切割控制方案,提升焊接切割控制质量等技术效果。
技术研发人员:张聪,李晨雨,王司恺,李明超,李立凡
受保护的技术使用者:苏州松德激光科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!