一种波形梁钢护栏机械化布放安装随车共融机器人的制作方法
本发明涉及波形梁钢护栏安装设备,具体涉及一种波形梁钢护栏机械化布放安装随车共融机器人。
背景技术:
1、公路护栏可以防止失控车辆冲出道路,防止失控车辆造成大范围的伤害,目前运用最广泛的是波形梁钢护栏,护栏为具有波浪形的梁钢,具有不容易被撞毁,同时又可对车辆和司乘人员起到很好的保护作用的特点。在公路的波形梁钢护栏板安装和更换方面,尤其是波形护栏的安装和更换,目前主要靠人工。先使用汽车吊或人工将波形梁钢护栏从运输车上卸下,摆放在待安装波形梁钢护栏的路边,然后由三个以上的工作人员人工抬起波形梁钢护栏到指定位置,对中安装孔位后进行锁紧安装,对于熟练安装的工作人员在20分钟左右,安装效率不高,劳动强度大,费时费力。
2、cn110258393a公开了一种安装公路波形梁钢护栏的接卸台车,其通过水平运输、垂直运输分步将波形梁钢护栏运送至托架上,再进行翻转运输安装,结构复杂,操作过程也较为繁琐,此单侧车载随车机械臂展臂短,车体需贴靠护栏安装位,当需要进行马路另一侧安装时还需将车体掉头,安装效率低。
技术实现思路
1、本发明的目的在于提供一种波形梁钢护栏机械化布放安装随车共融机器人,解决现有安装过程费时费力、效率低下的问题。
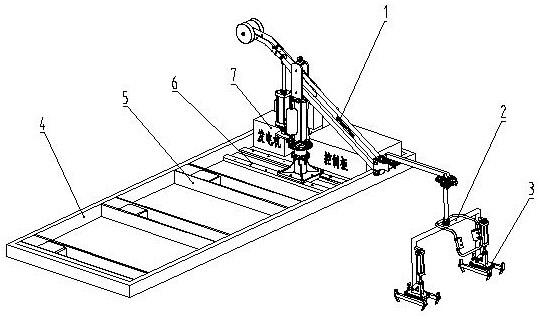
2、为解决上述的技术问题,本发明采用以下技术方案:一种波形梁钢护栏机械化布放安装随车共融机器人,其特征在于:包括底盘托架,底盘托架固定在运输车辆的车厢底部;底盘托架一侧设置有横向滑移模组,横向滑移模组顶部设置有共融机械臂总成,共融机械臂总成末端转动设置有操控牵引舵,操控牵引舵下方设置有护栏板抓取夹具;底盘托架另一侧平行设置有多个车载移垛装置,位于车载移垛装置上方的底盘托架上放置堆垛好的护栏板;所述共融机械臂总成包括机械臂支撑座,机械臂支撑座固定在横向滑移模组顶部,机械臂支撑座上部转动设置有俯仰部件固定座,俯仰部件固定座上侧转动设置有俯仰连杆机构,俯仰连杆机构通过回转臂机构与护栏板抓取夹具转动连接,俯仰部件固定座的转动使得护栏板抓取夹具绕机械臂支撑座转动,俯仰连杆机构驱动护栏板抓取夹具作竖向俯仰运动,操控牵引舵带动护栏板抓取夹具绕回转臂机构转动。
3、更进一步的技术方案是所述俯仰连杆机构包括俯仰连杆上臂,俯仰连杆上臂端部与俯仰部件固定座转动连接,俯仰连杆上臂一端向外延伸通过延伸杆连接有配重块,俯仰连杆上臂另一端转动连接在连接板上;俯仰连杆上臂下方平行设置有俯仰连杆下臂,俯仰连杆下臂端部与俯仰部件固定座转动连接,俯仰连杆下臂另一端转动连接在连接板上;延伸杆与大气缸的活塞杆端部转动连接,大气缸的缸体底部与机械臂支撑座中部转动连接。
4、更进一步的技术方案是所述回转臂机构包括相互垂直且转动连接的回转大臂和回转小臂,回转大臂顶部与连接板转动连接,回转大臂两端的转动轴上设置有制动器,其中一个制动器与连接板连接,制动后回转大臂不转动,另一个制动器与回转小臂连接,制动后回转小臂不转动。
5、更进一步的技术方案是所述操控牵引舵包括u型的牵引支架、操控扶手、翻转气缸、翻转支架、夹具固定座,牵引支架固定在回转小臂底部,操控扶手套接在回转小臂下部,牵引支架两侧相对设置有小气缸,小气缸的活塞杆与翻转支架顶部转动连接,牵引支架底部与翻转支架侧壁转动连接,翻转支架底部固定有夹具固定座,夹具固定座下方连接有护栏板抓取夹具。
6、更进一步的技术方案是所述护栏板抓取夹具包括相对设置的电磁铁固定杆,电磁铁固定杆上固定有电磁铁,电磁铁固定杆两端转动设置有卡爪。
7、更进一步的技术方案是所述横向滑移模组包括滑移轨道,滑移轨道两端固定在底盘托架内侧,与车厢宽度方向平行设置;滑移轨道内滑动设置有滑动组件基座,滑动组件基座底部两侧相对设置有负重滚轮,负重滚轮与滑移轨道底壁接触;滑动组件基座四个角外侧设置有导向滚轮,导向滚轮与滑移轨道内侧壁接触。
8、更进一步的技术方案是所述滑动组件基座上设置有减速电机,减速电机输出轴通过驱动齿轮与传动齿条连接,传动齿条两端固定在底盘托架内侧。
9、更进一步的技术方案是所述车载移垛装置包括移垛滑轨,移垛滑轨固定在底盘托架内侧,与车厢宽度方向平行设置,移垛滑轨内滑动设置由移垛装置基座,移垛装置基座底部两侧相对设置有负重滚轮,负重滚轮与移垛滑轨底壁接触;移垛装置基座四个角外侧设置有导向滚轮,导向滚轮与移垛滑轨内侧壁接触。
10、更进一步的技术方案是所述移垛装置基座侧壁转动连接有升降架,升降架顶部连接有支撑板,支撑板与移垛装置基座之间设置有气囊。
11、更进一步的技术方案是所述底盘托架上还设置有发电机、空压机和控制柜,发电机为机器人提供电源,空压机为机器人内的气缸、气囊提供压缩空气,控制柜控制机器人的动作。
12、工作原理:将共融机器人的底盘托架固定在运输车辆的车厢底部,将堆垛好的护栏板放置在底盘托架上且位于车载移垛装置顶部上方,将运输车行驶至需要安装波形梁钢护栏的公路上,将车厢打开,驱动横向滑移模组使其位于靠近待安装的一侧,下放共融机械臂总成,使护栏板抓取夹具夹住最上层的一块护栏板,俯仰部件固定座转动到合适位置,再驱动俯仰连杆机构先向上抬起护栏板再往下运动,回转臂机构调整护栏板位置,直到护栏板接近且平行安装位置,护栏板抓取夹具翻转护栏板,俯仰连杆机构和回转臂机构结合运动,直到护栏板与安装空位对中,操作人员通过紧固件将护栏板进行锁紧安装。共融机械臂总成重复抓取和安装护栏板动作,当一垛护栏板全部安装完后,车载移垛装置移动到目标位置,将待安装的护栏板垛抬升并滑移至安装工位,共融机械臂总成继续完成抓取与安装护栏板动作。当公路一侧护栏板安装完成后,驱动横向滑移模组运动到车厢另一侧,重复上述护栏板抓取安装动作,将公路另一侧的护栏板也进行安装。
13、与现有技术相比,本发明的有益效果是:
14、1.通过横向滑移模组,使得共融机器人可以沿车厢宽度方向移动至合适位置,既能保持整车的平衡与安全,也能在运输车不掉头的情况下对公路两侧的护栏板进行安装,提高安装效率。
15、2.通过俯仰部件固定座和俯仰连杆机构的设置,可以实现共融机械臂总成沿竖向的转动以及俯仰动作,便于护栏板抓取夹具快速抓取和移动护栏板。通过回转臂机构进一步实现护栏板的快速移动,实现其快速安装。
16、3.通过护栏板抓取夹具抓取护栏板,并将其进行翻转,通过操控牵引舵操控共融机械臂总成和护栏板抓取夹具,实现护栏板与安装孔位对中,实现护栏板的快速安装。
17、4.通过车载移垛装置实现为成垛的护栏板进行托举并移动到靠近车厢边缘安装位置,方便护栏板抓取夹具对其进行抓取和安装,方便操作人员进行操作。
18、5.上述波形梁钢护栏机械化布放安装随车共融机器人集护栏板移垛、抓取、安装为一体,对操作人员体力消耗小,大大减少了劳动强度,且可对车体两侧的护栏进行安装,大大提高了其工作范围,提高了护栏板的安装效率。
技术特征:
1.一种波形梁钢护栏机械化布放安装随车共融机器人,其特征在于:包括底盘托架(4),底盘托架(4)固定在运输车辆的车厢底部;底盘托架(4)一侧设置有横向滑移模组(6),横向滑移模组(6)顶部设置有共融机械臂总成(1),共融机械臂总成(1)末端转动设置有操控牵引舵(2),操控牵引舵(2)下方设置有护栏板抓取夹具(3);底盘托架(4)另一侧平行设置有多个车载移垛装置(5),位于车载移垛装置(5)上方的底盘托架(4)上放置堆垛好的护栏板;所述共融机械臂总成(1)包括机械臂支撑座(14),机械臂支撑座(14)固定在横向滑移模组(6)顶部,机械臂支撑座(14)上部转动设置有俯仰部件固定座(15),俯仰部件固定座(15)上侧转动设置有俯仰连杆机构(11),俯仰连杆机构(11)通过回转臂机构(12)与护栏板抓取夹具(3)转动连接,俯仰部件固定座(15)的转动使得护栏板抓取夹具(3)绕机械臂支撑座(14)转动,俯仰连杆机构(11)驱动护栏板抓取夹具(3)作竖向俯仰运动,操控牵引舵(2)带动护栏板抓取夹具(3)绕回转臂机构(12)转动。
2.根据权利要求1所述的一种波形梁钢护栏机械化布放安装随车共融机器人,其特征在于:所述俯仰连杆机构(11)包括俯仰连杆上臂(11c),俯仰连杆上臂(11c)端部与俯仰部件固定座(15)转动连接,俯仰连杆上臂(11c)一端向外延伸通过延伸杆(17)连接有配重块,俯仰连杆上臂(11c)另一端转动连接在连接板(16)上;俯仰连杆上臂(11c)下方平行设置有俯仰连杆下臂(11d),俯仰连杆下臂(11d)端部与俯仰部件固定座(15)转动连接,俯仰连杆下臂(11d)另一端转动连接在连接板(16)上;延伸杆(17)与大气缸(11a)的活塞杆端部转动连接,大气缸(11a)的缸体底部与机械臂支撑座(14)中部转动连接。
3.根据权利要求2所述的一种波形梁钢护栏机械化布放安装随车共融机器人,其特征在于:所述回转臂机构(12)包括相互垂直且转动连接的回转大臂(12a)和回转小臂(12b),回转大臂(12a)顶部与连接板(16)转动连接,回转大臂(12a)两端的转动轴上设置有制动器(12c),其中一个制动器(12c)与连接板(16)连接,制动后回转大臂(12a)不转动,另一个制动器(12c)与回转小臂(12b)连接,制动后回转小臂(12b)不转动。
4.根据权利要求3所述的一种波形梁钢护栏机械化布放安装随车共融机器人,其特征在于:所述操控牵引舵(2)包括u型的牵引支架(21)、操控扶手(22)、小气缸(23)、翻转支架(24)、夹具固定座(25),牵引支架(21)固定在回转小臂(12b)底部,操控扶手(22)套接在回转小臂(12b)下部,牵引支架(21)两侧相对设置有小气缸(23),小气缸(23)的活塞杆与翻转支架(24)顶部转动连接,牵引支架(21)底部与翻转支架(24)侧壁转动连接,翻转支架(24)底部固定有夹具固定座(25),夹具固定座(25)下方连接有护栏板抓取夹具(3)。
5.根据权利要求1所述的一种波形梁钢护栏机械化布放安装随车共融机器人,其特征在于:所述护栏板抓取夹具(3)包括相对设置的电磁铁固定杆(31),电磁铁固定杆(31)上固定有电磁铁,电磁铁固定杆(31)两端转动设置有卡爪(32)。
6.根据权利要求1所述的一种波形梁钢护栏机械化布放安装随车共融机器人,其特征在于:所述横向滑移模组(6)包括滑移轨道(61),滑移轨道(61)两端固定在底盘托架(4)内侧,与车厢宽度方向平行设置;滑移轨道(61)内滑动设置有滑动组件基座(62),滑动组件基座(62)底部两侧相对设置有负重滚轮(63),负重滚轮(63)与滑移轨道(61)底壁接触;滑动组件基座(62)四个角外侧设置有导向滚轮(66),导向滚轮(66)与滑移轨道(61)内侧壁接触。
7.根据权利要求6所述的一种波形梁钢护栏机械化布放安装随车共融机器人,其特征在于:所述滑动组件基座(62)上设置有减速电机(64),减速电机(64)输出轴通过驱动齿轮与传动齿条(65)连接,传动齿条(65)两端固定在底盘托架(4)内侧。
8.根据权利要求1所述的一种波形梁钢护栏机械化布放安装随车共融机器人,其特征在于:所述车载移垛装置(5)包括移垛滑轨(51),移垛滑轨(51)固定在底盘托架(4)内侧,与车厢宽度方向平行设置,移垛滑轨(51)内滑动设置由移垛装置基座(52),移垛装置基座(52)底部两侧相对设置有负重滚轮(63),负重滚轮(63)与移垛滑轨(51)底壁接触;移垛装置基座(52)四个角外侧设置有导向滚轮(66),导向滚轮(66)与移垛滑轨(51)内侧壁接触。
9.根据权利要求8所述的一种波形梁钢护栏机械化布放安装随车共融机器人,其特征在于:所述移垛装置基座(52)侧壁转动连接有升降架(53),升降架(53)顶部连接有支撑板(54),支撑板(54)与移垛装置基座(52)之间设置有气囊(55)。
10.根据权利要求1所述的一种波形梁钢护栏机械化布放安装随车共融机器人,其特征在于:所述底盘托架(4)上还设置有发电机(7)、空压机和控制柜,发电机(7)为机器人提供电源,空压机为机器人内的气缸、气囊提供压缩空气,控制柜控制机器人的动作。
技术总结
本发明公开了一种波形梁钢护栏机械化布放安装随车共融机器人,涉及波形梁钢护栏安装设备技术领域。底盘托架固定在运输车辆的车厢底部;底盘托架一侧设置有横向滑移模组,横向滑移模组顶部设置有共融机械臂总成,共融机械臂总成末端转动设置有操控牵引舵,操控牵引舵下方设置有护栏板抓取夹具;底盘托架另一侧平行设置有多个车载移垛装置,位于车载移垛装置上方的底盘托架上放置堆垛好的护栏板;共融机械臂总成的机械臂支撑座固定在横向滑移模组顶部,机械臂支撑座上部转动设置有俯仰部件固定座,俯仰部件固定座上侧转动设置有俯仰连杆机构,俯仰连杆机构通过回转臂机构与护栏板抓取夹具转动连接,实现共融机械臂总成快速抓取和安装护栏板。
技术研发人员:谢海涛,李双祥,杨童,赵宏程,张云,胡智彬,顿向明,山磊,李彦宏,谭应锋,李镇辉,灿斌,段晓虹,李凤先,刘坤,颜光庆,李卓然,赵金辉
受保护的技术使用者:云南省交通科学研究院有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!