一种双机器人协同的金属异型管激光切割方法及设备与流程
本发明涉及激光切割,尤其涉及一种双机器人协同的金属异型管激光切割方法及设备。
背景技术:
1、随着工业技术的发展,传统的机加工方式逐渐被新型加工方式所取代。如传统的冲孔加工需要使用冲压设备配合冲孔模具完成,但目前已有采用激光切孔来替换传统的冲孔,激光切割设备在待加工零部件上切出所需要的孔,灵活度较高。
2、目前的激光切割设备在对金属异型管(经过弯折的金属管)进行切割时存在以下情况:由于金属异型管是经过弯折的,不管是弯折精度不够或是金属管在弯折后自身回弹等因素,都会使得金属异型管的实际形状与理想形状之间存在误差,而激光切割头是按照预定的切割轨迹进行切割的,这就导致切割出来的切割结构的位置会相对于金属异型管本身发生偏移,加工精度不够。为了提高切割的精度,现有技术会使用夹具夹持金属异型管,夹具不仅有夹持功能,也有矫形功能,夹具使金属异型管被夹持至理想形状,之后激光切割设备对金属异型管进行切割,该种方式能提高切割结构的加工精度。但是,这也使得在进行流水式生产时需要使用大量的夹具,而且当面对不同形状尺寸的金属异型管时需要配置不同的夹具,导致夹具成本高;此外,该种生产方式需要工作人员不断在夹具中取放金属异型管,在夹持时需要准确放置金属异型管,这也对工作人员的操作精细度提出一定的要求,容易出现放不好所导致的误差,进而影响加工精度,工作人员的劳动强度也高。
3、上述问题急需解决。
技术实现思路
1、本发明的目的在于提供一种双机器人协同的金属异型管激光切割方法及设备,旨在解决现有技术中对金属异型管进行激光切割时由于需要使用夹具而导致的成本高、加工精度不足和劳动强度高的问题。
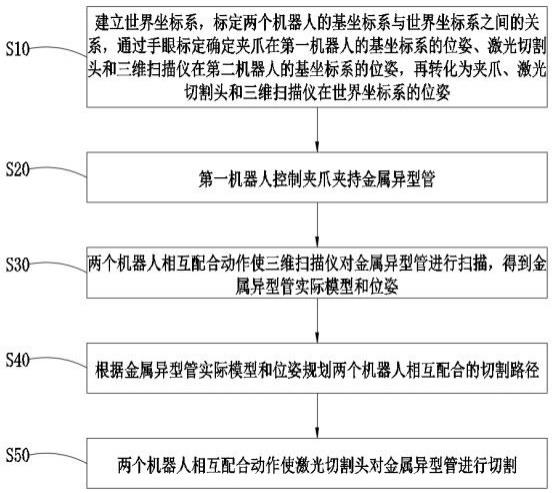
2、为了达到上述的目的,本发明提供了一种双机器人协同的金属异型管激光切割方法,金属异型管为包括多个结构段组成的连续性管材,多个结构段包括直线段和折弯段,采用两个机器人,两个机器人由控制器协同控制,第一机器人安装有用于夹持金属异型管的夹爪,第二机器人安装有激光切割头和三维扫描仪;该方法包括以下步骤:s10、建立世界坐标系,标定两个机器人的基坐标系与世界坐标系之间的关系,通过手眼标定确定夹爪在第一机器人的基坐标系的位姿、激光切割头和三维扫描仪在第二机器人的基坐标系的位姿,再转化为夹爪、激光切割头和三维扫描仪在世界坐标系的位姿;s20、第一机器人控制夹爪夹持金属异型管;s30、两个机器人相互配合动作使三维扫描仪对金属异型管进行扫描,得到金属异型管实际模型和位姿;s40、根据金属异型管实际模型和位姿规划两个机器人相互配合的切割路径;s50、两个机器人相互配合动作使激光切割头对金属异型管进行切割。
3、进一步地,在进行步骤s20前,还包括步骤s11:在控制器中输入金属异型管标准模型,设定夹爪夹持金属异型管的位置及角度,控制器规划出两个机器人相互配合动作的无碰撞扫描路径。
4、进一步地,第二机器人安装有防碰撞装置,在进行步骤s30时,如三维扫描仪或激光切割头与金属异型管发生碰撞则防碰撞装置发送信号到控制器,并进行步骤s31:控制器控制三维扫描仪停止扫描,控制器比较已扫描得到的金属异型管实际模型与金属异型管标准模型,得出金属异型管实际模型相对于金属异型管标准模型在位姿和形状上的偏差值,并根据该偏差值重新规划出两个机器人相互配合动作的无碰撞扫描路径,并再次执行步骤s30,直至完成金属异型管的扫描。
5、进一步地,在步骤s40中,规划两个机器人相互配合的切割路径的方法为:把金属异型管标准模型拆分为多个标准结构段,标准结构段之间的划分界限为直线段与折弯段的交接处,之后得到各个标准切割结构在各个标准结构段中的相对位置信息;把金属异型管实际模型拆分为多个实际结构段,实际结构段之间的划分界限为直线段与折弯段的交接处,之后分别得到各个实际结构段的位姿,借助所述相对位置信息的转化计算得到各个实际切割结构的位姿,并以各个实际切割结构的位姿来规划切割路径。
6、进一步地,在步骤s50中,每当完成一个结构段上的所有切割结构的切割后,判断该结构段是否为折弯段,如否,则继续进行后续切割;如是,则进行步骤s51:两个机器人相互配合动作使三维扫描仪对未切割的结构段进行扫描,得到未切割的结构段的最新形状和位姿,将该未切割的结构段的最新形状和位姿与步骤s30中得到的金属异型管实际模型和位姿进行比较,判断两者是否一致,如是,则继续按照原来的切割路径进行切割;如否,则进行步骤s52:根据未切割的结构段的最新形状和位姿规划两个机器人相互配合以切割未切割的结构段的最新切割路径;两个机器人相互配合动作使激光切割头以最新切割路径对未切割的结构段进行切割;直至完成所有切割动作。
7、进一步地,在步骤s51中,按照切割路径从前往后对所有结构段进行排序,三维扫描仪仅扫描位于刚完成切割的结构段的后一个结构段。
8、进一步地,对切割路径的规划方式为先切割靠近夹爪的结构段,再切割远离夹爪的结构段。
9、本发明还提供了一种双机器人协同的金属异型管激光切割设备,用于实现上述的双机器人协同的金属异型管激光切割方法,其包括两个机器人,两个机器人由控制器协同控制,第一机器人的活动端安装有用于夹持金属异型管的夹爪,第二机器人的活动端安装有激光切割头和三维扫描仪。
10、进一步地,第二机器人的活动端安装有防碰撞装置,激光切割头和三维扫描仪均安装在防碰撞装置。
11、进一步地,还包括上料传送装置和下料传送装置,上料传送装置和下料传送装置均设置有传送带以及安装在传送带的多个料架,第一机器人能够从上料传送装置的料架抓取金属异型管,第一机器人还能够把金属异型管放到下料传送装置的料架;两个机器人均为五轴以上机器人。
12、本发明所提供的一种双机器人协同的金属异型管激光切割方法,其借助两个机器人完成对金属异型管的切割,作业时,先借助第二机器人上所设置的三维扫描仪对金属异型管进行扫描,得到金属异型管实际模型和位姿后,再让两个机器人协同作业以实现对金属异型管上的切割结构进行切割,加工精度高,其无需配置专门的夹具对不同型号的金属异型管进行夹持,成本低,也无需工作人员过多参与,自动化程度高。本发明的双机器人协同的金属异型管激光切割设备用于实现上述方法,具有同样的好处。
技术特征:
1.一种双机器人协同的金属异型管激光切割方法,金属异型管为包括多个结构段组成的连续性管材,多个结构段包括直线段和折弯段,其特征在于,
2.根据权利要求1所述的双机器人协同的金属异型管激光切割方法,其特征在于,在进行步骤s20前,还包括步骤s11:在控制器中输入金属异型管标准模型,设定夹爪夹持金属异型管的位置及角度,控制器规划出两个机器人相互配合动作的无碰撞扫描路径。
3.根据权利要求2所述的双机器人协同的金属异型管激光切割方法,其特征在于,第二机器人安装有防碰撞装置,在进行步骤s30时,如三维扫描仪或激光切割头与金属异型管发生碰撞则防碰撞装置发送信号到控制器,并进行步骤s31:控制器控制三维扫描仪停止扫描,控制器比较已扫描得到的金属异型管实际模型与金属异型管标准模型,得出金属异型管实际模型相对于金属异型管标准模型在位姿和形状上的偏差值,并根据该偏差值重新规划出两个机器人相互配合动作的无碰撞扫描路径,并再次执行步骤s30,直至完成金属异型管的扫描。
4.根据权利要求2所述的双机器人协同的金属异型管激光切割方法,其特征在于,在步骤s40中,规划两个机器人相互配合的切割路径的方法为:把金属异型管标准模型拆分为多个标准结构段,标准结构段之间的划分界限为直线段与折弯段的交接处,之后得到各个标准切割结构在各个标准结构段中的相对位置信息;
5.根据权利要求4所述的双机器人协同的金属异型管激光切割方法,其特征在于,在步骤s50中,每当完成一个结构段上的所有切割结构的切割后,判断该结构段是否为折弯段,如否,则继续进行后续切割;
6.根据权利要求5所述的双机器人协同的金属异型管激光切割方法,其特征在于,在步骤s51中,按照切割路径从前往后对所有结构段进行排序,三维扫描仪仅扫描位于刚完成切割的结构段的后一个结构段。
7.根据权利要求5所述的双机器人协同的金属异型管激光切割方法,其特征在于,对切割路径的规划方式为先切割靠近夹爪的结构段,再切割远离夹爪的结构段。
8.一种双机器人协同的金属异型管激光切割设备,其特征在于:用于实现如权利要求1至7中任意一项所述的双机器人协同的金属异型管激光切割方法,其包括两个机器人,两个机器人由控制器协同控制,第一机器人的活动端安装有用于夹持金属异型管的夹爪,第二机器人的活动端安装有激光切割头和三维扫描仪。
9.根据权利要求8所述的双机器人协同的金属异型管激光切割设备,其特征在于:第二机器人的活动端安装有防碰撞装置,激光切割头和三维扫描仪均安装在防碰撞装置。
10.根据权利要求8所述的双机器人协同的金属异型管激光切割设备,其特征在于:还包括上料传送装置和下料传送装置,上料传送装置和下料传送装置均设置有传送带以及安装在传送带的多个料架,第一机器人能够从上料传送装置的料架抓取金属异型管,第一机器人还能够把金属异型管放到下料传送装置的料架;两个机器人均为五轴以上机器人。
技术总结
本发明涉及激光切割技术领域,尤其涉及一种双机器人协同的金属异型管激光切割方法及设备;该方法包括以下步骤:建立世界坐标系,确定夹爪、激光切割头和三维扫描仪在世界坐标系的位姿;第一机器人控制夹爪夹持金属异型管;两个机器人相互配合动作使三维扫描仪对金属异型管进行扫描,得到金属异型管实际模型和位姿;根据金属异型管实际模型和位姿规划两个机器人相互配合的切割路径;两个机器人相互配合动作使激光切割头对金属异型管进行切割。本发明的双机器人协同的金属异型管激光切割方法及设备无需设置专门的夹具,生产成本低,加工精度高,而且能大大降低工作人员的劳动强度。
技术研发人员:胡光民,胡俊,胡勇,夏荣康,张望,谢智锋,廖灿富,罗渊锦,曾旭,罗茂鑫,黄友强
受保护的技术使用者:宏晟激光技术(佛山)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!