一种基于视觉引导的舵机自动拧钉装配方法与流程
本发明属于非标自动化装配,尤其是涉及一种基于视觉引导的舵机自动拧钉装配方法。
背景技术:
1、传统装配机器人只能执行固定的示教作业,即机器人的抓取点和装配位置固定,为保证装配作业的可行性和精确程度,需要精度很高的工装定位,同时需精心设计抓手手指和辅助机构。但在实际装配作业中,因机器人重复定位精度、待装配工件加工精度以及工件装配时的公差裕量等原因,示教再现方式的机器人作业无法满足装配精度要求。
2、螺钉锁付是产品装配过程中非常常见的工序,螺钉安装的好坏直接影响产品的性能以及使用寿命。传统的锁付方式为人工锁付,但人工操作费时费力、人力成本较高且锁付受人为影响导致一致性较差。
3、随着机器视觉技术的发展,基于视觉引导的螺钉锁付方式发展迅速,且应用场景越来越广泛。但目前的基于视觉引导的螺钉锁付方法都是一钉一拍照,即拍一次照定位一次并拧一颗螺钉,对于大批量螺钉锁付效率仍然很低。
4、因此,有必要研究一种基于视觉引导的舵机自动拧钉装配方法来应对现有技术的不足,以解决上述问题。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种舵机自动装配系统及其归零标定方法,解决现有基于视觉引导的螺钉锁付方法都是拍一次照定位一次并拧一颗螺钉,对于大批量螺钉锁付效率低的问题。
2、本发明的目的主要是通过以下技术方案实现的:
3、一种基于视觉引导的舵机自动拧钉装配方法,利用一种基于视觉引导的舵机自动拧钉装配系统;
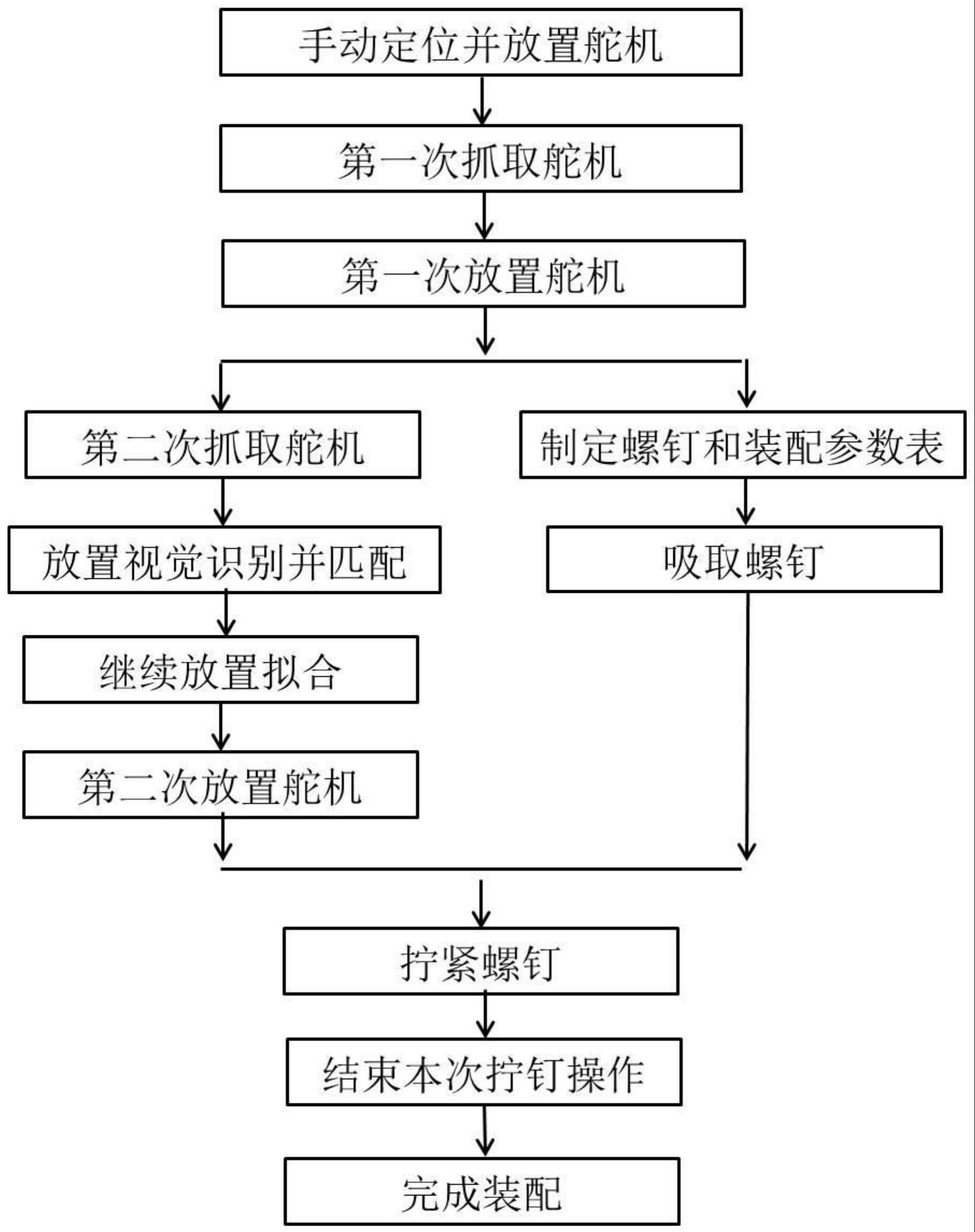
4、所述自动拧钉装配方法包括如下步骤:
5、手动定位并放置舵机;
6、第一次抓取舵机;
7、第二次放置舵机;
8、吸取螺钉;
9、拧紧螺钉;
10、结束本次拧钉操作;
11、完成装配。
12、进一步地,第一次抓取舵机包括:控制器依据第一相机对待抓取的舵机进行视频识别并控制第一机械臂对准舵机。
13、进一步地,第一次抓取舵机还包括:参照第一力控组件反馈的第一机械臂的运动参数,控制第一末端执行组件夹取舵机。
14、进一步地,第二次放置舵机包括:将舵机压入安装位置。
15、进一步地,第二次放置舵机还包括:控制器控制抓取机构返回初始位置。
16、进一步地,吸取螺钉包括:按照螺钉空间位置信息,控制器控制螺钉吸附器依序吸取螺钉。
17、进一步地,吸取螺钉还包括:从编号1的螺钉开始吸取。
18、进一步地,拧紧螺钉包括:控制器控制第二机械臂运动至舵机处,相机拍照并计算得到中心点的空间位置信息;
19、进一步地,结束本次拧钉操作包括:第二机械臂运动带动第二末端执行组件脱离舵机。
20、进一步地,完成装配包括:重复所述吸取螺钉至结束本次拧钉操作,直到完成所有螺钉锁付任务。
21、与现有技术相比,本发明至少可实现如下有益效果之一:
22、(1)本发明的装配方法通过机器视觉一次性计算并生成螺钉空间位置信息表,能够自动完成螺钉吸取、拧钉直至锁付完成工作,最终实现舵机的自动装配;
23、(2)本发明的二次定位机构能够实现舵机在横向、纵向和竖向三维方向的二次定位,可以确定舵机在二次定位机构上唯一的三维位置,控制器只需控制抓取机构在此三维位置对舵机进行二次抓取,就能够保证对舵机的精准夹持,进而确保将舵机精准放置在飞行器的装配位置上;
24、(3)本发明的平移机构将抓取机构进行纵向平移,拓展抓取机构的活动范围;
25、(4)本发明的第一末端执行组件在放置舵机时,需要将舵机压入飞行器上的安装位置,压板能够防止舵机在压入飞行器上的安装位置时向执行器方向脱离第一夹爪,确保舵机安装到位;
26、(5)本发明的第一半夹和第二半夹的一端均设有防脱勾,舵机的侧壁上设有安装孔,在第一夹爪抓取舵机时,防脱勾能够插入安装孔,如果在抓取机构抓取并移动舵机的过程中,舵机脱离第一夹爪,防脱勾能够防止舵机跌落,保证设备和人员安全;
27、(6)本发明的抓勾能够勾住垫片,防止垫片从螺钉上脱落;
28、(7)本发明的螺钉吸附器为圆筒体,螺钉吸附器内能够形成负压,从而能够吸附螺钉,确保螺钉不会从螺钉吸附器中脱落。
29、本发明中,上述各技术方案之间可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的内容中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过文字以及附图中所特别指出的内容中来实现和获得。
技术特征:
1.一种基于视觉引导的舵机自动拧钉装配方法,其特征在于,利用一种基于视觉引导的舵机自动拧钉装配系统;
2.根据权利要求1所述的基于视觉引导的舵机自动拧钉装配方法,其特征在于,所述第一次抓取舵机(8)包括:控制器依据第一相机(23)对待抓取的舵机(8)进行视频识别并控制第一机械臂(21)对准舵机(8)。
3.根据权利要求2所述的基于视觉引导的舵机自动拧钉装配方法,其特征在于,所述第一次抓取舵机(8)还包括:参照第一力控组件(22)反馈的第一机械臂(21)的运动参数,控制第一末端执行组件夹取舵机(8)。
4.根据权利要求1所述的基于视觉引导的舵机自动拧钉装配方法,其特征在于,所述第二次放置舵机(8)包括:将舵机(8)压入安装位置。
5.根据权利要求4所述的基于视觉引导的舵机自动拧钉装配方法,其特征在于,所述第二次放置舵机(8)还包括:控制器控制抓取机构(2)返回初始位置。
6.根据权利要求1所述的基于视觉引导的舵机自动拧钉装配方法,其特征在于,所述吸取螺钉(9)包括:按照螺钉(9)空间位置信息,控制器控制螺钉吸附器(46)依序吸取螺钉(9)。
7.根据权利要求6所述的基于视觉引导的舵机自动拧钉装配方法,其特征在于,所述吸取螺钉(9)还包括:从编号1的螺钉(9)开始吸取。
8.根据权利要求1所述的基于视觉引导的舵机自动拧钉装配方法,其特征在于,所述拧紧螺钉(9)包括:控制器控制第二机械臂(41)运动至舵机(8)处,相机(43)拍照并计算得到中心点的空间位置信息。
9.根据权利要求1所述的基于视觉引导的舵机自动拧钉装配方法,其特征在于,所述结束本次拧钉操作包括:第二机械臂(41)运动从而带动第二末端执行组件脱离舵机(8)。
10.根据权利要求1所述的基于视觉引导的舵机自动拧钉装配方法,其特征在于,所述完成装配包括:重复所述吸取螺钉(9)至结束本次拧钉操作,直到完成所有螺钉锁付任务。
技术总结
本发明涉及一种基于视觉引导的舵机自动拧钉装配方法,属于非标自动化装配技术领域,解决了现有基于视觉引导的螺钉锁付方法都是拍一次照定位一次并拧一颗螺钉,对于大批量螺钉锁付效率低的问题。本发明公开了基于视觉引导的舵机自动拧钉装配方法,包括如下步骤:第一次抓取舵机;第二次放置舵机;装配舵机;完成装配。本发明的装配方法通过机器视觉一次性计算并生成螺钉空间位置信息表,能够自动完成螺钉吸取、拧钉直至锁付完成工作,最终实现舵机的自动装配。
技术研发人员:甄红卫,李倩,蔡虎,王紫煜,王亮,李志培,曹英荣,王昌红,贺龙,任士明
受保护的技术使用者:北京星航机电装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!