一种刚性增强的机器人钻孔攻螺纹装置及其方法与流程
本发明涉及机器人钻孔的,尤其涉及一种刚性增强的机器人钻孔攻螺纹装置及其方法。
背景技术:
1、传统的大型五轴数控机床,但针对大型工件的钻孔攻螺纹作业可以做到高精度,原因在于机床床身具有高刚性的特点,在钻孔攻螺纹受到较大外力的过程中,床身弹性变形小。系统刚度一般为10kn/mm以上,有的重型机床甚至可以做到900kn/mm。
2、工业机器人具有柔性高、工作区域大、价格便宜等优点,但刚性较差,典型的工业机器人的系统刚性为1kn/mm以内,机器人在完成铝铸件的钻孔攻螺纹作业的时候受到的作用力一般范围是0.2-1kn,本体会产生0.2-1mm或以上的本体位移,这会对钻孔和攻螺纹的精度产生影响。
3、在密闭的防水工作房内,两台机器人手持钻攻装置对大型压铸件进行加工作业,钻攻装置用于对工件的钻孔和攻螺纹作业。钻攻装置是一个单轴系统作业,组成部分主要有:电主轴、钻攻滑台,钻攻作业时机器人保持不动。该钻攻装置已经是闭环控制的,经过对该装置的测试,在手持该钻攻装置的系统(比如机器人)刚性足够的情况下,钻孔攻螺纹的精度是足够的。
4、这样的系统设计有如下局限性:
5、1.针对高精度的压铸件加工,机器人系统加工精度可能达不到客户的要求;
6、2.由于在钻攻作用力大的情况下,机器人位移加剧,导致不得不通过抑制加工参数来减少钻攻作用力,最终导致机器人加工效率和数控机床有巨大的差距,虽然机器人加工系统的成本比数控机床低,考虑到设备产出,最终单件加工的设备成本不一定低;
7、3.在系统刚性不佳的情况下,加工时振动会很大,导致加工刀具寿命难以保证,而刀具寿命大幅降低,可能导致单件实际生产成本并没有大幅下降;
8、综合上述3点,机器人在加工时收到作用力大的情况下,不一定具备竞争力。
技术实现思路
1、针对现有的机器人钻孔装置存在的上述问题,现旨在提供一种刚性增强的机器人钻孔攻螺纹装置及其方法,解决了工业机器人手持电主轴进行机加工作业中遇到的刚性不足的问题,机器人在钻孔或攻螺纹作业的过程中收到的作用力会导致机器人本体形变发生位移,进而导致加工精度、加工效率、刀具寿命达不到理论值。
2、具体技术方案如下:
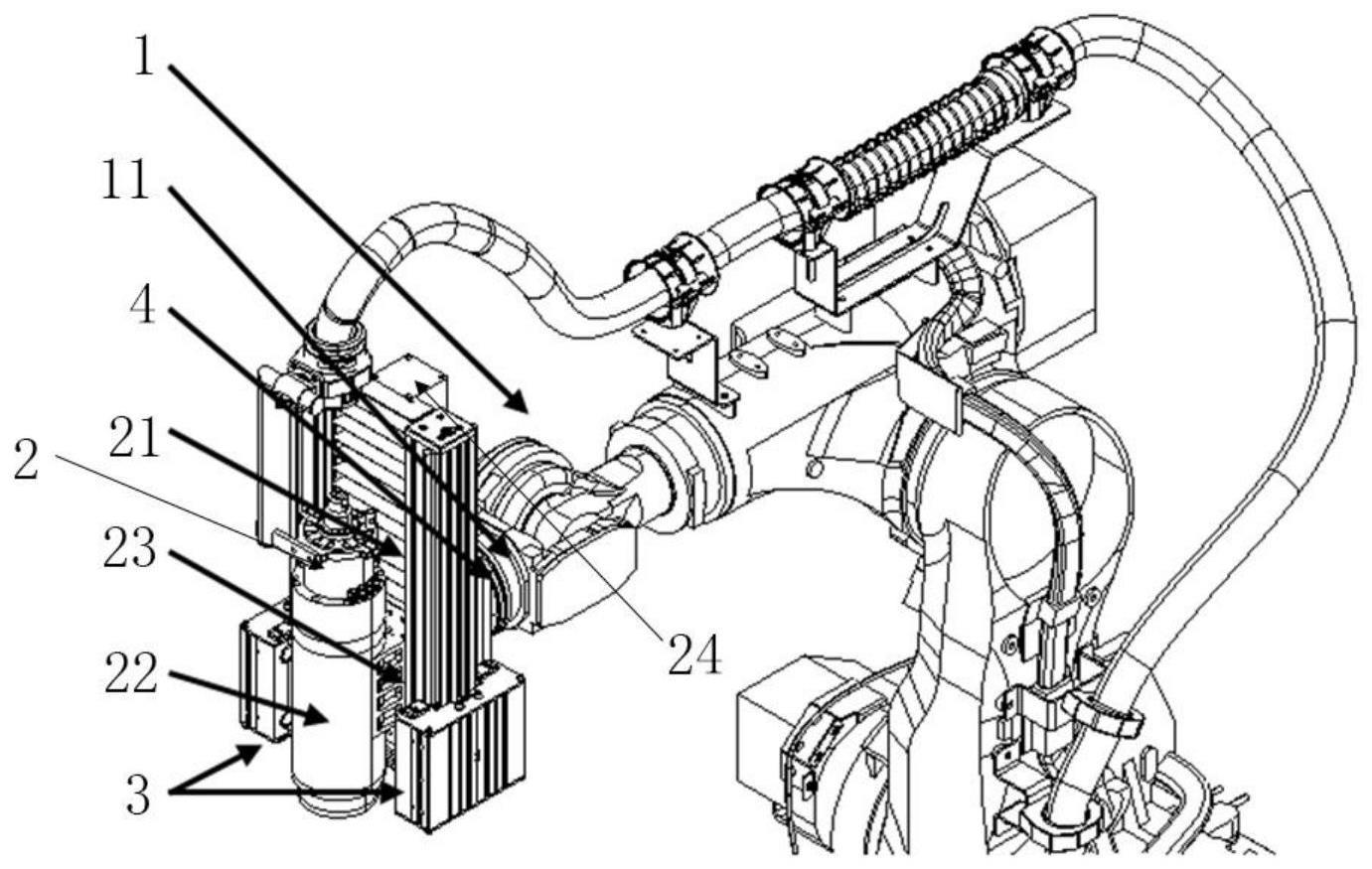
3、一种刚性增强的机器人钻孔攻螺纹装置,包括:机器人以及安装在所述机器人上的钻攻装置,所述钻攻装置上设有至少一惯性力产生装置,所述惯性力产生装置用于所述钻攻装置在钻孔攻螺纹时,产生抵消所述钻攻装置受到的作用力;
4、所述机器人与所述钻攻装置的连接处设有力传感器,所述力传感器用于实时监控所述钻攻装置的反作用力。
5、上述的刚性增强的机器人钻孔攻螺纹装置,其中,还包括:控制器,所述力传感器将所述钻攻装置的加工作用力传输至所述控制器,所述控制器实时调控所述惯性力产生装置的作用力。
6、上述的刚性增强的机器人钻孔攻螺纹装置,其中,所述钻攻装置的两侧对称设有所述惯性力产生装置。
7、上述的刚性增强的机器人钻孔攻螺纹装置,其中,所述钻攻装置包括:钻攻驱动件和电主轴,所述钻攻驱动件安装于所述机器人上,所述钻攻驱动件驱动所述电主轴上下活动。
8、上述的刚性增强的机器人钻孔攻螺纹装置,其中,所述惯性力产生装置包括:驱动组件和惯性块,所述驱动组件设于所述钻攻装置的侧壁,所述驱动组件驱动所述惯性块上下活动。
9、上述的刚性增强的机器人钻孔攻螺纹装置,其中,所述钻攻装置还包括:钻攻滑台,所述钻攻驱动件驱动所述钻攻滑台上下活动,所述电主轴纵向安装于所述钻攻滑台上。
10、上述的刚性增强的机器人钻孔攻螺纹装置,其中,所述驱动组件包括:惯性力驱动件和直线轨道,所述直线轨道设于所述钻攻装置的侧壁,所述惯性块滑动设于所述直线轨道上,所述惯性力驱动件驱动所述惯性块上下活动。
11、上述的刚性增强的机器人钻孔攻螺纹装置,其中,所述驱动组件包括:惯性力驱动件和丝杠,所述丝杠设于所述钻攻装置的侧壁,所述惯性块滑动设于所述丝杠上,所述惯性力驱动件驱动所述惯性块上下活动。
12、上述的刚性增强的机器人钻孔攻螺纹装置,其中,所述钻攻装置还包括:
13、基座,所述基座安装于所述机器人上,所述钻攻驱动件安装于所述基座上;
14、光栅尺,所述光栅尺设于所述钻攻滑台上。
15、一种方法,其中,应用于上述的任意一项所述的刚性增强的机器人钻孔攻螺纹装置,所述方法包括:
16、步骤s1:所述电主轴开始向下运动,所述力传感器实时采集所述钻攻装置的反作用力数据,在所述电主轴的钻头或者丝锥接触到工件的瞬间,所述力传感器会采集到反作用力的阶跃信号;
17、步骤s2:所述电主轴进行加工动作时,所述驱动组件驱动所述惯性块向上加速;
18、步骤s3:直至在钻孔结束,同时所述驱动组件驱动所述惯性块的运动速度降低为0,所述惯性块的减速会产生相反的惯性力,此时所述钻攻驱动件将所述电主轴加速向上拉动所产生的惯性力对消所述惯性块减速的惯性力。
19、上述技术方案与现有技术相比具有的积极效果是:
20、本发明增加惯性力产生装置,工业机器人在钻孔或攻螺纹时,将不受到巨大的加工冲击力,通过惯性力对冲抵消加工作用力,有效的抑制了系统振动,确保了系统刚性,最终保证了加工精度。
技术特征:
1.一种刚性增强的机器人钻孔攻螺纹装置,其特征在于,包括:机器人以及安装在所述机器人上的钻攻装置,所述钻攻装置上设有至少一惯性力产生装置,所述惯性力产生装置用于所述钻攻装置在钻孔攻螺纹时,产生抵消所述钻攻装置受到的作用力;
2.根据权利要求1所述刚性增强的机器人钻孔攻螺纹装置,其特征在于,还包括:控制器,所述力传感器将所述钻攻装置的加工作用力传输至所述控制器,所述控制器实时调控所述惯性力产生装置的作用力。
3.根据权利要求2所述刚性增强的机器人钻孔攻螺纹装置,其特征在于,所述钻攻装置的两侧对称设有所述惯性力产生装置。
4.根据权利要求3所述刚性增强的机器人钻孔攻螺纹装置,其特征在于,所述钻攻装置包括:钻攻驱动件和电主轴,所述钻攻驱动件安装于所述机器人上,所述钻攻驱动件驱动所述电主轴上下活动。
5.根据权利要求4所述刚性增强的机器人钻孔攻螺纹装置,其特征在于,所述惯性力产生装置包括:驱动组件和惯性块,所述驱动组件设于所述钻攻装置的侧壁,所述驱动组件驱动所述惯性块上下活动。
6.根据权利要求5所述刚性增强的机器人钻孔攻螺纹装置,其特征在于,所述钻攻装置还包括:钻攻滑台,所述钻攻驱动件驱动所述钻攻滑台上下活动,所述电主轴纵向安装于所述钻攻滑台上。
7.根据权利要求5所述刚性增强的机器人钻孔攻螺纹装置,其特征在于,所述驱动组件包括:惯性力驱动件和直线轨道,所述直线轨道设于所述钻攻装置的侧壁,所述惯性块滑动设于所述直线轨道上,所述惯性力驱动件驱动所述惯性块上下活动。
8.根据权利要求5所述刚性增强的机器人钻孔攻螺纹装置,其特征在于,所述驱动组件包括:惯性力驱动件和丝杠,所述丝杠设于所述钻攻装置的侧壁,所述惯性块滑动设于所述丝杠上,所述惯性力驱动件驱动所述惯性块上下活动。
9.根据权利要求5所述刚性增强的机器人钻孔攻螺纹装置,其特征在于,所述钻攻装置还包括:
10.一种方法,其特征在于,应用于如权利要求5-9所述的刚性增强的机器人钻孔攻螺纹装置,所述方法包括:
技术总结
本发明公开一种刚性增强的机器人钻孔攻螺纹装置及其方法,包括:机器人以及安装在所述机器人上的钻攻装置,所述钻攻装置上设有至少一惯性力产生装置,所述惯性力产生装置用于所述钻攻装置在钻孔攻螺纹时,产生抵消所述钻攻装置受到的作用力;所述机器人与所述钻攻装置的连接处设有力传感器,所述力传感器用于实时监控所述钻攻装置的反作用力。本发明解决了工业机器人手持电主轴进行机加工作业中遇到的刚性不足的问题,机器人在钻孔或攻螺纹作业的过程中收到的作用力会导致机器人本体形变发生位移,进而导致加工精度、加工效率、刀具寿命达不到理论值。
技术研发人员:李慧敏,吴钰屾,宋思明,黄阳,高伟
受保护的技术使用者:上海发那科机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!