一种基于激光器的激光打标控制系统的制作方法
本发明涉及激光器控制,特别是涉及一种基于激光器的激光打标控制系统。
背景技术:
1、目前,随着激光器应用的快速发展,采用激光器为产品进行激光打标已广泛应用于产品流水线生产过程中,从而极大地提升了产品流水线生产的效率。
2、由于激光打标需要保证产品在流水线上的摆放位姿固定,因此需要对产品位姿进行监控,现有方式通常采用特征点核验的方式确定当前产品的位姿是否与标准位姿一致,进而在产品位姿出现异常能够及时预警,但是,现有方式会导致激光打标过程的自动化程度降低,也即在出现产品位姿异常时,需要采用人工方式进行异常产品调整,因此,在激光器位姿可变换的基础上,现有技术可以根据特征点偏移信息确定激光器位姿调整方式,从而实现自动化的激光打标过程。
3、然而,由于用于特征点提取的图像通常是二维图像,仅能准确表征出产品在传送带水平表面上的旋转信息,在产品因传送带表面不平整、震动等因素而出现在垂直于传送带水平表面方向的旋转情况时,采用现有方式将会导致激光器位姿调整错误,进而导致激光打标的准确率大幅下降,因此,如何提高激光打标的准确率成为了亟待解决的问题。
技术实现思路
1、针对上述技术问题,本发明采用的技术方案为一种基于激光器的激光打标控制系统,激光打标控制系统包括:图像采集设备、激光器、数据库、处理器和存储有计算机程序的存储器,其中,数据库中包括待打标产品的参考标识信息集合a={a1,a2,…,an,…,an}和当前产品的当前标识信息b,an是指待打标产品对应第n个参考位姿的第n个参考标识信息,a1是指待打标产品在标准参考位姿下的参考标识信息,an={an1,an2,…,anm,…,anmn},anm是指第n个参考标识信息中的第m个参考标识点坐标,n的取值范围为[1,2,…,n],m的取值范围为[1,2,…,mn],b={b1,b2,…,bk,…,bk},bk是指第k个当前标识点坐标,k的取值范围为[1,2,…,k],当计算机程序被处理器执行时,实现以下步骤:
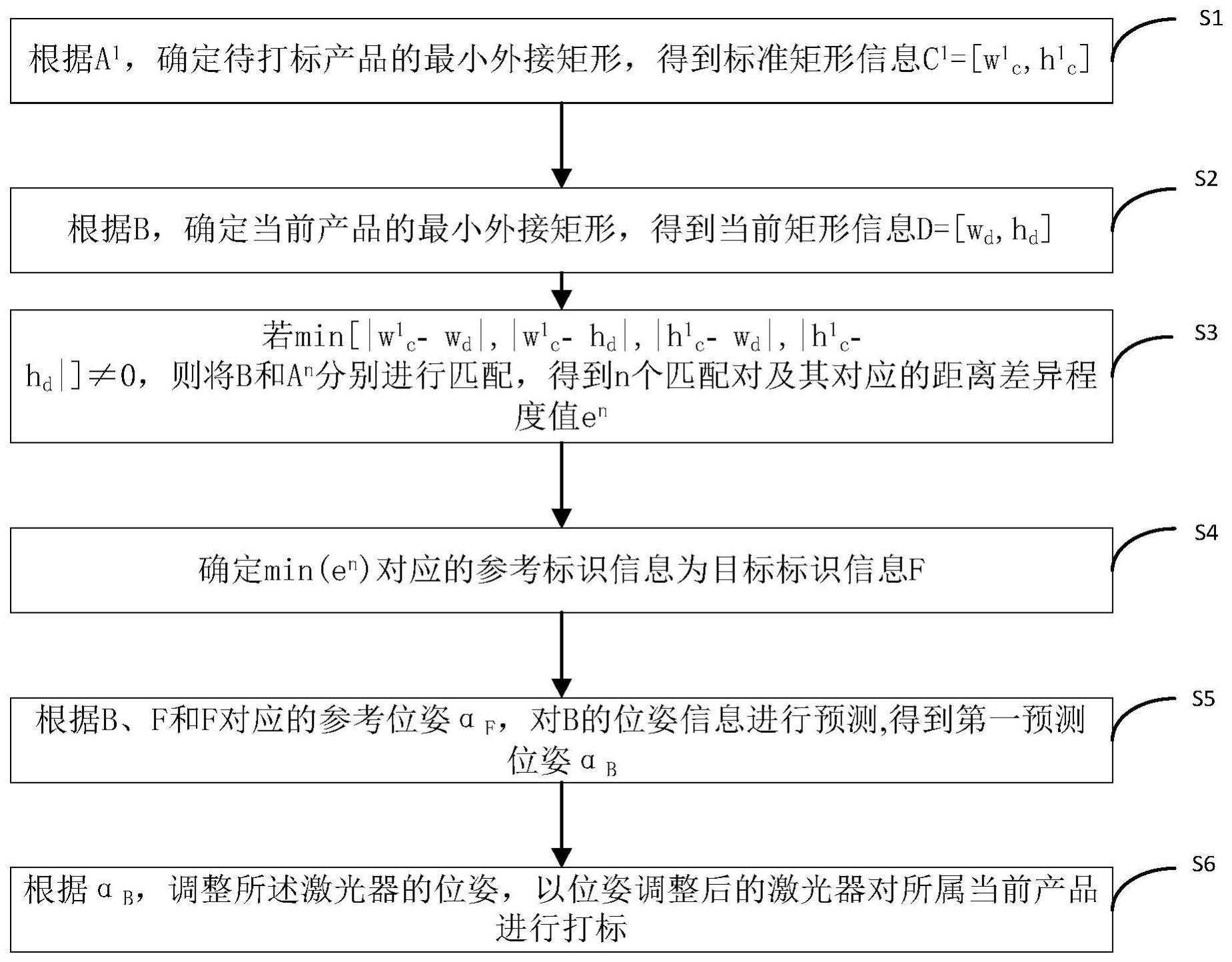
2、s11,根据a1,确定待打标产品的最小外接矩形,得到标准矩形信息c1=[w1c,h1c]。
3、s12,根据b,确定当前产品的最小外接矩形,得到当前矩形信息d=[wd,hd]。
4、s13,若min[|w1c-wd|,|w1c-hd|,|h1c-wd|,|h1c-hd|]≠0,则将b和an分别进行匹配,得到n个匹配对及其对应的距离差异程度值en。
5、其中,s13步骤还包括以下步骤:
6、s131,若k<mn,则从an中确定对应bk的匹配点gnk,使得min[σ2(bk-gnk)]。
7、s132,计算en=σkk=1(bk-gnk)/k。
8、s14,确定min(en)对应的参考标识信息为目标标识信息f。
9、s15,根据b、f和f对应的参考位姿αf,对b的位姿信息进行预测,得到第一预测位姿αb。
10、s16,根据αb,调整激光器的位姿,以位姿调整后的激光器对所属当前产品进行打标。
11、本发明与现有技术相比具有明显的有益效果,借由上述技术方案,本发明提供的一种基于激光器的激光打标控制系统可达到相当的技术进步性及实用性,并具有产业上的广泛利用价值,其至少具有以下有益效果:
12、本发明提供了一种基于激光器的激光打标控制系统,激光打标控制系统包括:图像采集设备、激光器、数据库、处理器和存储有计算机程序的存储器,其中,数据库中包括待打标产品的参考标识信息集合a={a1,a2,…,an,…,an}和当前产品的当前标识信息b,an是指待打标产品对应第n个参考位姿的第n个参考标识信息,a1是指待打标产品在标准参考位姿下的参考标识信息,an={an1,an2,…,anm,…,anmn},anm是指第n个参考标识信息中的第m个参考标识点坐标,n的取值范围为[1,2,…,n],m的取值范围为[1,2,…,mn],b={b1,b2,…,bk,…,bk},bk是指第k个当前标识点坐标,k的取值范围为[1,2,…,k],当计算机程序被处理器执行时,实现以下步骤,根据a1,确定待打标产品的最小外接矩形,得到标准矩形信息c1=[w1c,h1c],根据b,确定当前产品的最小外接矩形,得到当前矩形信息d=[wd,hd],若min[|w1c-wd|,|w1c-hd|,|h1c-wd|,|h1c-hd|]≠0,则将b和an分别进行匹配,得到n个匹配对及其对应的距离差异程度值en,确定min(en)对应的参考标识信息为目标标识信息f,根据b、f和f对应的参考位姿αf,对b的位姿信息进行预测,得到第一预测位姿αb,根据αb,调整激光器的位姿,以位姿调整后的激光器对所属当前产品进行打标。
13、可知,根据待打标产品和当前产品的最小外接矩形的边长进行比对判断,能够以较小的计算量快速确定出当前产品存在位姿异常的情况,而且,通过标识点整体匹配的方式,能够在仅有二维信息的基础上更加充分地表征出产品的位姿信息,相较于现有技术直接通过特征点独立匹配的方式,避免了特征点匹配冲突等情况,从而提高了产品位姿预测的准确率,进而提高了激光器进行激光打标的准确率。
技术特征:
1.一种基于激光器的激光打标控制系统,其特征在于,所述激光打标控制系统包括:图像采集设备、激光器、数据库、处理器和存储有计算机程序的存储器,其中,所述数据库中包括待打标产品的参考标识信息集合a={a1,a2,…,an,…,an}和当前产品的当前标识信息b,an是指所述待打标产品对应第n个参考位姿的第n个参考标识信息,a1是指所述待打标产品在标准参考位姿下的参考标识信息,an={an1,an2,…,anm,…,anmn},anm是指第n个参考标识信息中的第m个参考标识点坐标,n的取值范围为[1,2,…,n],m的取值范围为[1,2,…,mn],b={b1,b2,…,bk,…,bk},bk是指第k个当前标识点坐标,k的取值范围为[1,2,…,k],当所述计算机程序被处理器执行时,实现以下步骤:
2.根据权利要求1所述的激光打标控制系统,其特征在于,所述最小外接矩形通过minarearect函数确定。
3.根据权利要求1所述的激光打标控制系统,其特征在于,所述计算机程序被处理器执行时,还实现以下步骤:
4.根据权利要求3所述的激光打标控制系统,其特征在于,s22步骤中还包括以下步骤:
5.根据权利要求4所述的激光打标控制系统,其特征在于,s22步骤中还包括以下步骤:
6.根据权利要求1所述的激光打标控制系统,其特征在于,将b和an分别进行匹配时采用km匹配算法。
7.根据权利要求1所述的激光打标控制系统,其特征在于,所述计算机程序被处理器执行时,还实现以下步骤:
8.根据权利要求1所述的激光打标控制系统,其特征在于,s15步骤中还包括以下步骤:
技术总结
本申请涉及激光器控制技术领域,特别是涉及一种基于激光器的激光打标控制系统,包括:图像采集设备、激光器、数据库、处理器和存储有计算机程序的存储器,当计算机程序被处理器执行时,实现以下步骤,根据A<supgt;1</supgt;,确定标准矩形信息C<supgt;1</supgt;=[w<supgt;1</supgt;<subgt;c</subgt;,h<supgt;1</supgt;<subgt;c</subgt;],根据B,确定当前矩形信息D=[w<subgt;d</subgt;,h<subgt;d</subgt;],若min[|w<supgt;1</supgt;<subgt;c</subgt;‑w<subgt;d</subgt;|,|w<supgt;1</supgt;<subgt;c</subgt;‑h<subgt;d</subgt;|,|h<supgt;1</supgt;<subgt;c</subgt;‑w<subgt;d</subgt;|,|h<supgt;1</supgt;<subgt;c</subgt;‑h<subgt;d</subgt;|]≠0,则将B和A<supgt;n</supgt;匹配,得到n个距离差异程度值e<supgt;n</supgt;,确定min(e<supgt;n</supgt;)对应的参考标识信息为目标标识信息F,根据B、F和F对应的参考位姿α<subgt;F</subgt;,得到第一预测位姿α<subgt;B</subgt;,根据α<subgt;B</subgt;,调整激光器的位姿,以位姿调整后的激光器对所属当前产品进行打标。
技术研发人员:潘伟巍,张磊,董金岩
受保护的技术使用者:上海频准激光科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!