拧紧装置和拧紧系统的制作方法
本发明主要涉及机械设备,尤其涉及一种拧紧装置和拧紧系统。
背景技术:
1、目前拧紧装置和系统价格高昂且不支持功能模块扩展。拧紧装置一旦出现故障后,维修时间长,维修成本高。此外,该套拧紧系统无法实现功能扩展,无法满足某些客户的个性化使用需求。
技术实现思路
1、本发明要解决的技术问题是提供一种国产化且精度高的拧紧装置和支持功能拓展的拧紧系统。
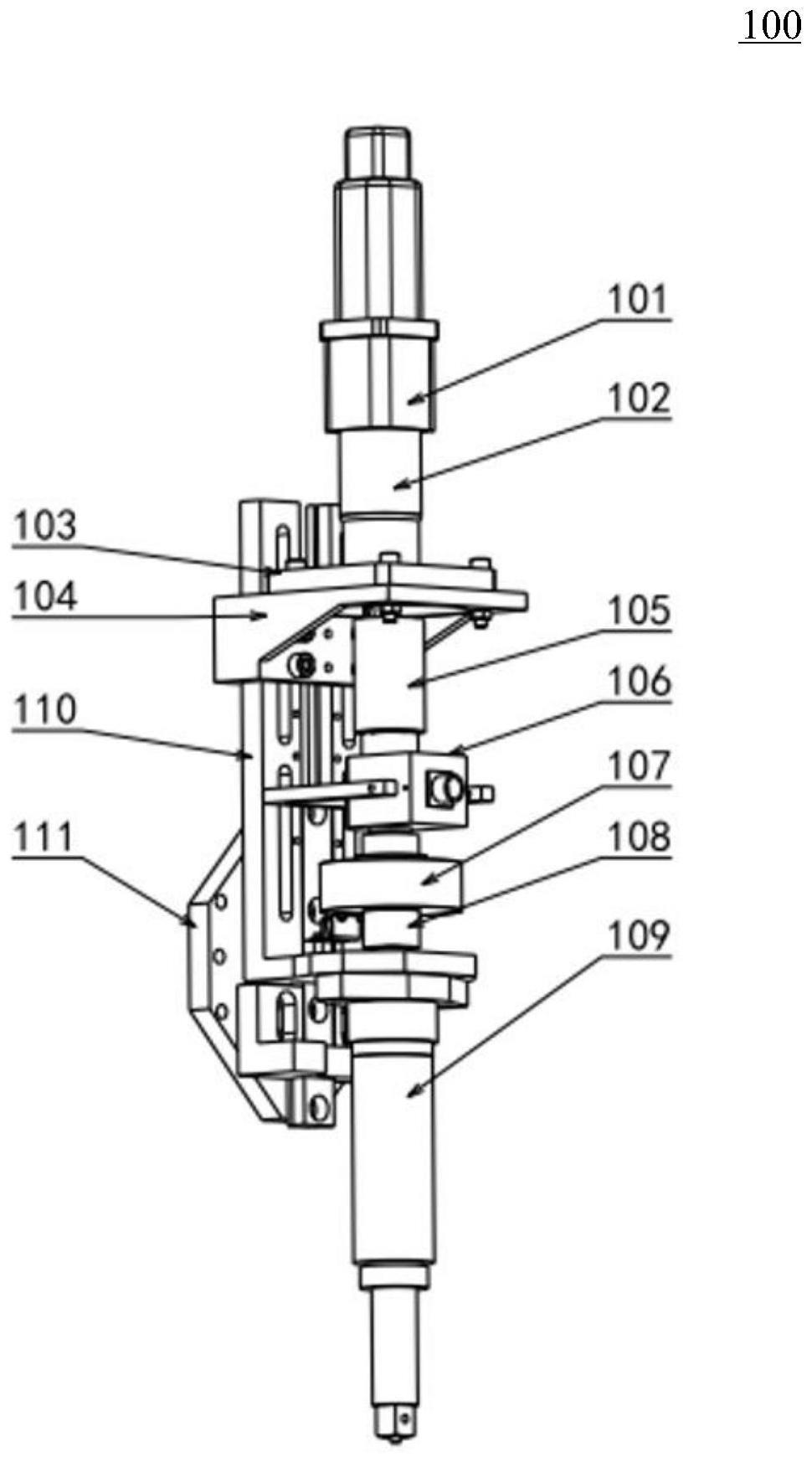
2、为解决上述技术问题,本发明提供了一种拧紧装置,包括:依次连接的电机、减速器、第一联轴器、扭矩传感器总成、角度传感器总成、第二联轴器、输出端子,还包括调整支架,所述调整支架用于固定所述扭矩传感器总成和所述角度传感器总成。其中,所述扭矩传感器总成包括扭矩传感器、扭矩传感器固定支架和柔性弹簧,所述扭矩传感器固定支架将所述扭矩传感器固定在所述调整支架上,所述扭矩传感器用于采集拧紧过程的扭矩数据,所述柔性弹簧位于所述扭矩传感器和所述扭矩传感器固定支架之间,所述柔性弹簧可实时补偿拧紧过程中所述扭矩传感器的对中性,保证扭矩数据采集的精度。
3、可选地,所述角度传感器总成包括角度传感器和角度传感器柔性支架,所述角度传感器柔性支架将角度传感器固定在所述调整支架上,所述角度传感器用于采集拧紧过程的角度数据,所述角度传感器柔性支架可实时补偿拧紧过程中所述角度传感器的对中性,保证角度数据采集的精度。
4、可选地,所述调整支架包括第一组滑槽和第二组滑槽,所述动力固定支架可在所述第一组滑槽滑动,所述扭矩传感器固定支架和所述角度传感器柔性支架可在所述第二组滑槽滑动。
5、可选地,还包括连接支架,所连接支架包括相对的第一面和第二面,所述连接支架通过所述第一面与所述调整支架螺栓连接,所述第二面提供标准连接口,所述标准连接口用于连接机器人。
6、可选地,所述电机和所述减速器配合输出的扭矩范围为0-500nm,转速范围为0-300转/每分钟。
7、为解决上述技术问题,本发明提供了一种拧紧系统,包括:如上所述的拧紧装置,其中所述拧紧装置的电机用于根据控制单元发送的控制参数提供驱动动力;控制单元,分别与所述电机、所述扭矩传感器总成和所述角度传感器总成连接,所述控制单元用于向所述电机发送控制参数,从所述扭矩传感器总成和所述角度传感器总成分别获取所述拧紧装置运行时的扭矩数据和角度数据,根据所述扭矩数据、所述角度数据和从交互单元获取的分析模式制定参考扭矩范围;交互单元,与所述控制单元连接,用于接收所述拧紧装置的控制参数和分析模式,并将所述控制参数和分析模式发送给所述控制单元,所述控制参数包括扭矩控制参数或角度控制参数。
8、可选地,所述控制单元根据所述扭矩数据、所述角度数据和所述分析模式制定参考扭矩范围包括:根据所述扭矩数据和所述角度数据生成扭矩和角度关系曲线;当所述分析模式为第一分析模式时,根据所述控制参数在所述扭矩和角度关系曲线上确定工艺扭矩数值,将所述工艺扭矩数值作为所述参考扭矩范围。
9、可选地,还包括:获取所述拧紧装置对多个零件进行拧紧时的扭矩数据和角度数据;对应每个零件生成一条扭矩和角度关系曲线,确定每条扭矩和角度关系曲线的工艺扭矩数值;根据多个工艺扭矩数值计算出扭矩公差带,将所述扭矩公差带作为所述参考扭矩范围。
10、可选地,还包括:当所述分析模式为第二分析模式时,在所述扭矩和角度关系曲线中确定扭矩最大值,将所述扭矩最大值作为所述参考扭矩范围。
11、可选地,还包括:当所述分析模式为第三分析模式时,根据所述扭矩和角度关系曲线确定屈服扭矩数值,将所述屈服扭矩数值作为所述参考扭矩范围,所述屈服扭矩数值为待拧紧零件发生屈服对应的扭矩值。
12、可选地,所述控制单元根据所述扭矩和角度关系曲线确定屈服扭矩数值包括:计算所述扭矩和角度关系曲线中线性段的斜率,将线性段的斜率作为参考斜率;判断所述线性段之后的各个点的斜率是否小于等于50%的参考斜率,如果是,将第一个小于等于50%的参考斜率的点对应的扭矩作为所述屈服扭矩数值。
13、可选地,在车间拧紧任务中,所述控制单元还用于判断所述扭矩数据是否在所述参考扭矩范围内,如果否,向所述交互单元发出预警信号。
14、与现有技术相比,本发明具有以下优点:
15、本发明的拧紧装置,一方面,通过同时采用扭矩传感器总成和角度传感器总成进行动力传递,可以提高拧紧的精度;另一方面,本发明的扭矩传感器总成包括柔性弹簧,通过柔性弹簧可实时补偿拧紧过程中扭矩传感器的对中性,保证扭矩数据采集的精度,进一步提高拧紧的精度。
技术特征:
1.一种拧紧装置,其特征在于,包括依次连接的电机、减速器、第一联轴器、扭矩传感器总成、角度传感器总成、第二联轴器和输出端子,还包括调整支架,所述调整支架用于固定所述扭矩传感器总成和所述角度传感器总成;
2.如权利要求1所述的拧紧装置,其特征在于,所述角度传感器总成包括角度传感器和角度传感器柔性支架,所述角度传感器柔性支架将所述角度传感器固定在所述调整支架上,所述角度传感器用于采集拧紧过程的角度数据,所述角度传感器柔性支架实时补偿拧紧过程中所述角度传感器的对中性。
3.如权利要求2所述的拧紧装置,其特征在于,还包括动力固定底座、动力固定支架,其中,所述减速器通过所述动力固定底座固定在所述动力固定支架上,所述动力固定支架与所述调整支架连接。
4.如权利要求3所述的拧紧装置,其特征在于,所述调整支架包括第一组滑槽和第二组滑槽,所述动力固定支架能够在所述第一组滑槽滑动,所述扭矩传感器固定支架和所述角度传感器柔性支架能够在所述第二组滑槽滑动。
5.如权利要求1所述的拧紧装置,其特征在于,还包括连接支架,所连接支架包括相对的第一面和第二面,所述连接支架通过所述第一面与所述调整支架螺栓连接,所述第二面提供标准连接口,所述标准连接口用于连接机器人。
6.如权利要求1所述的拧紧装置,其特征在于,所述电机和所述减速器配合输出的扭矩范围为0-500nm,转速范围为0-300转/每分钟。
7.一种拧紧系统,其特征在于,包括:
8.如权利要求7所述的拧紧系统,其特征在于,所述控制单元根据所述扭矩数据、所述角度数据和所述分析模式制定参考扭矩范围包括:
9.如权利要求8所述的拧紧系统,其特征在于,还包括:
10.如权利要求8所述的拧紧系统,其特征在于,还包括:当所述分析模式为第二分析模式时,在所述扭矩和角度关系曲线中确定扭矩最大值,将所述扭矩最大值作为所述参考扭矩范围。
11.如权利要求8所述的拧紧系统,其特征在于,还包括:当所述分析模式为第三分析模式时,根据所述扭矩和角度关系曲线确定屈服扭矩数值,将所述屈服扭矩数值作为所述参考扭矩范围,所述屈服扭矩数值为待拧紧零件发生屈服对应的扭矩值。
12.如权利要求11所述的拧紧系统,其特征在于,所述控制单元根据所述扭矩和角度关系曲线确定屈服扭矩数值包括:
13.如权利要求7所述的拧紧系统,其特征在于,在车间拧紧任务中,所述控制单元还用于判断所述扭矩数据是否在所述参考扭矩范围内,如果否,向所述交互单元发出预警信号。
技术总结
本发明提供了一种精度高的拧紧装置和拧紧系统,其中,拧紧装置包括依次连接的电机、减速器、第一联轴器、扭矩传感器总成、角度传感器总成、第二联轴器、输出端子,还包括调整支架,扭矩传感器总成和角度传感器总成与调整支架连接;其中,扭矩传感器总成包括扭矩传感器、扭矩传感器固定支架和柔性弹簧,扭矩传感器固定支架将扭矩传感器固定在调整支架上,扭矩传感器用于采集拧紧过程的扭矩数据,柔性弹簧位于扭矩传感器和扭矩传感器固定支架之间,柔性弹簧可实时补偿拧紧过程中扭矩传感器的对中性,保证扭矩数据采集的精度。
技术研发人员:汤书凡,汤东胜
受保护的技术使用者:上海孜孜科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!